
數(shù)字化、智能化是儀器儀表的發(fā)展方向之一,同時儀器儀表的數(shù)據(jù)采集速度越來越快,數(shù)據(jù)量越來越大,對數(shù)據(jù)處理時間的要求也越來越短,這就對儀器儀表的硬件平臺提出了新的要求。目前很多簡單智能儀表仍使用單片機(jī)來實現(xiàn),單片機(jī)應(yīng)用廣泛,價格也很便宜,接口性能良好,容易實現(xiàn)人機(jī)接口,但單片機(jī)系統(tǒng)復(fù)雜,尤其是乘法運算速度慢,在運算量大的實時控制系統(tǒng)中很難有所作為。高端儀表的硬件平臺通常使用嵌入式微機(jī)系統(tǒng),但其成本比較高,也不宜產(chǎn)品的小型化。
總體方案
本文所要設(shè)計的是一種脫機(jī)型儀表硬件平臺。平臺應(yīng)可以滿足一般的數(shù)據(jù)采集的實時性要求,可以靈活的適用于多種不同的應(yīng)用場合,可實現(xiàn)多種類型信號的采集和處理,結(jié)構(gòu)小巧緊湊,便于現(xiàn)場處理,還能與PC機(jī)或其他設(shè)備進(jìn)行通信和交換數(shù)據(jù)。對此,我們構(gòu)建了基于DSP和CPLD技術(shù)的硬件平臺。整個平臺由三部分組成(圖1)。
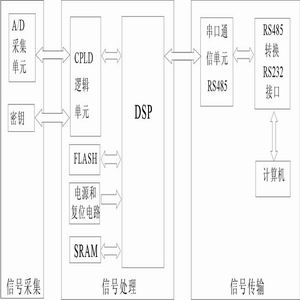
圖1 總體框圖
信號采集單元負(fù)責(zé)獲取外部信息并將其轉(zhuǎn)換為數(shù)字信號輸出。在輸入端,由于采用了靈活性很強(qiáng)的CPLD作為A/D與DSP之間的接口,使這個硬件平臺可方便的適用于不同的應(yīng)用場合。針對不同的傳感器和應(yīng)用需求,選擇合適的A/D芯片。實驗中,系統(tǒng)使用的是CMOS圖像傳感器OV7120,把圖像轉(zhuǎn)換為8位分辨率的數(shù)字圖像。A/D輸出的數(shù)據(jù)先經(jīng)過CPLD預(yù)處理,DSP把CPLD作為一個端口讀入數(shù)據(jù),放到外擴(kuò)的SRAM中。
信號處理單元是整個系統(tǒng)的核心,由TMS320C6712及其外圍輔助電路構(gòu)成,負(fù)責(zé)對采入的信號進(jìn)行實時處理。DSP讀入SRAM中的數(shù)據(jù)并進(jìn)行相應(yīng)的算法處理。系統(tǒng)中各模塊間的通訊與邏輯控制由CPLD負(fù)責(zé)。
信號傳輸單元是DSP與PC機(jī)或其它系統(tǒng)實時通訊的中介。本系統(tǒng)中,DSP處理后的結(jié)果通過RS485總線遠(yuǎn)距離傳輸,最后通過RS485/RS232轉(zhuǎn)換器送給PC機(jī)。工作流程框圖如圖2所示。

圖2 程序流程圖
硬件電路設(shè)計
圖像采集是OV7120和CPLD協(xié)同工作來實現(xiàn)的,CPLD為OV7120提供I2C接口來配置寄存器,同時提供CCLK時鐘信號,并對圖像數(shù)據(jù)鎖存后傳給DSP,圖3是接口設(shè)計原理圖。其中SCL、SDA為I2C控制線;CCLK為OV7120的輸入時鐘;PCLK、HSYNC、VSYNC分別為點頻和行、場同步輸出信號;D[70]為8位圖像數(shù)據(jù)輸出信號線;HREF是水平參考信號;INT4為DSP的中斷。
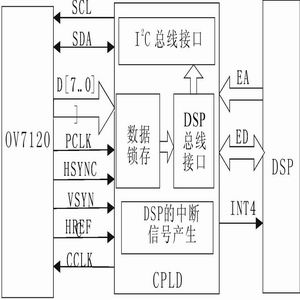
& nbsp; 圖3 接口設(shè)計原理圖
實 驗
信號處理算法由DSP芯片實現(xiàn),在實驗中我們編寫了二維FFT算法來驗證平臺的性能。二維FFT的實現(xiàn)流程如圖4所示,算法由C語言編寫。圖5是實際采到的一幅圖像,圖6是提取256×256的圖像并進(jìn)行二維FFT運算后的結(jié)果。

圖4 二維FFT流程圖

圖5 實際采得的一幅圖像
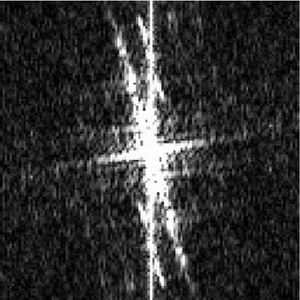
圖6二維FFT運算結(jié)果
實驗表明該平臺實現(xiàn)了圖像采集和處理功能,圖像采集速度約1幀/s,256×256的二維FFT算法的運行時間為960ms。但對于不像圖像這么大的數(shù)據(jù)采集量,可以先將數(shù)據(jù)存放到內(nèi)部RAM中的,系統(tǒng)的數(shù)據(jù)采集速度為12Mbyte/S,對于可以直接在內(nèi)部運行的32×32的二維FFT算法的運行時間為5ms。
結(jié) 語
測試結(jié)果和實際應(yīng)用說明,此平臺具有較快的數(shù)據(jù)采集速度和較高的運算能力,能夠完成實時數(shù)據(jù)的采集和處理,是一種體積小、重量輕、微功耗、低成本、處理速度快、可靠性高、便于升級的測試測量儀器平臺,在儀器儀表領(lǐng)域具有著廣闊的應(yīng)用前景。平臺所用DSP芯片為TMS320C6712,其主頻目前只使用80MHz,運算速度不是很高,數(shù)據(jù)存儲器為SRAM,讀取速度也不是很快,如果將DSP升級為TMS320C6711(最高150MHz);并把數(shù)據(jù)存儲器換為SDRAM,可以大大提高平臺的運算速度。
參考文獻(xiàn):
1. Texas Instruments. TMS320C6712 FLOATING-POINT DIGITAL SIGNAL PROCESSOR (SPRS148). 2000-8