
0 引言
冷凍干燥技術(shù)自1980年代在我國興起以來已取得長足發(fā)展,并已廣泛應(yīng)用于食品、低溫和真空等科學(xué)領(lǐng)域,基于一些食品和藥品加工行業(yè)的工藝需要,真空冷凍干燥技術(shù)需要迅速應(yīng)用與推廣。控制系統(tǒng)對物料的加工過程和質(zhì)量影響比較大,還決定了真空冷凍干燥裝置運(yùn)行的自動化程度。近年來國內(nèi)外一些有實(shí)力的廠家對凍干機(jī)控制系統(tǒng)的研究有了較大的進(jìn)展,采用了PLC、觸摸屏等裝置,能夠繪制凍干過程的工藝曲線,較大地改善了凍干機(jī)的性能。
隨著科技的發(fā)展,由于觸摸屏和PLC控制系統(tǒng)不易實(shí)現(xiàn)功能擴(kuò)展、升級困難、操作界面不夠豐富等原因,已經(jīng)不能完全滿足企業(yè)的需要,市場需要開發(fā)出更加先進(jìn)的凍干設(shè)備控制系統(tǒng)。2007年1月上海遠(yuǎn)東制藥機(jī)械總廠開發(fā)完成了目前國內(nèi)最先進(jìn)的嵌入式凍干控制系統(tǒng)。
控制系統(tǒng)根據(jù)凍干技術(shù)對凍干機(jī)控制系統(tǒng)的新要求而設(shè)計,采用高性能的Xscale內(nèi)核嵌入式微處理器,結(jié)合FPGA完成集散控制(DCS),該系統(tǒng)有穩(wěn)定可靠的工作性能、強(qiáng)大的擴(kuò)展功能、友善的界面,從而具有更強(qiáng)的競爭力。
1 系統(tǒng)硬件結(jié)構(gòu)設(shè)計
該控制系統(tǒng)主要由嵌入式微控制器和現(xiàn)場可編程門陣列(FPGA)器件、溫度調(diào)節(jié)模塊、真空度調(diào)節(jié)模塊、GSM模塊、本地和網(wǎng)絡(luò)PC、LCD控制、各種傳感器、打印機(jī)及檢測、控制模塊組成,如圖1所示。
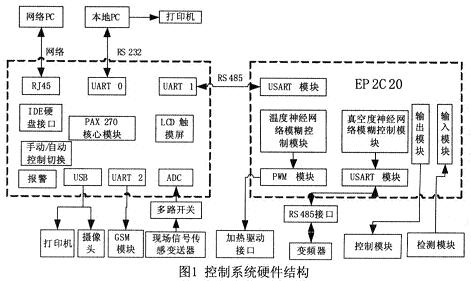
控制系統(tǒng)的核心由ARM及FPGA器件組成,實(shí)現(xiàn)整個系統(tǒng)的通信、現(xiàn)場顯示、現(xiàn)場控制等功能,同時實(shí)現(xiàn)溫度、真空度的神經(jīng)網(wǎng)絡(luò)控制。
檢測量模塊主要由傳感器、信號調(diào)整及采集等組成,實(shí)現(xiàn)溫度、真空度、濕度以及各主要部件(熱繼電器、交流接觸器位置等)的狀態(tài)的測量。控制模塊主要由光隔離、驅(qū)動及執(zhí)行機(jī)構(gòu)組成,實(shí)現(xiàn)氣閥、水閥、電動機(jī)、變頻器、加熱器等的驅(qū)動與控制。LCD觸摸屏、IDE硬盤、打印機(jī)協(xié)調(diào)工作以實(shí)現(xiàn)凍干工藝曲線的實(shí)時采集、顯示、輸出與數(shù)據(jù)存儲,還有凍干機(jī)溫度與真空度參數(shù)的設(shè)置與控制等功能。
GSM模塊實(shí)現(xiàn)工業(yè)現(xiàn)場的無線監(jiān)測,本地PC可用于遠(yuǎn)程控制,網(wǎng)絡(luò)PC可擴(kuò)展為正在興起的網(wǎng)絡(luò)控制。嵌入式微處理器的選擇。由于該真空干燥系統(tǒng)要進(jìn)行大量的數(shù)據(jù)運(yùn)算,需要較強(qiáng)的控制能力,需要有較多的USART接口,同時要有ADC轉(zhuǎn)換功能、LCD觸摸屏、USB口等,在微處理器選擇上,普通的8位、16位單片機(jī)已難以勝任,因此32位的嵌入式微處理器是比較好的選擇。本系統(tǒng)選擇INTEL PAX270,是一款基于32位Xscale核心的高性能、工業(yè)級的32位RISC微控制器,它具有極低的功耗,LCD控制器(最大支持64K色STN和1256K色TFT)提供1通道LCD專用DMA,8通道10比特ADC和觸摸屏接口,3通道UART(IrDA1.0,16字節(jié)TxFIFO,和16字節(jié)RX FIFO)/2通道SPI,2端口USB主機(jī)/1端口USB設(shè)備(1.1版),PWM通道(4路輸出),以及多達(dá)119個中斷源,這款微控制器特別適合自動化應(yīng)用,并適用于工業(yè)控制、醫(yī)療系統(tǒng)、訪問控制和故障維護(hù)等應(yīng)用領(lǐng)域。
FPGA器件的選擇。由于該系統(tǒng)包括了神經(jīng)網(wǎng)絡(luò)的實(shí)現(xiàn),需要大量RAM空間來保存中間參數(shù)和查表計算,同時還需要大量的通用I/O接口,用于輸入輸出模塊以及快速響應(yīng)精確的PWM調(diào)制功能,因此用FPGA是比較好的選擇。這里選擇Altera公司推出的低成本Cyclone系列,型號為EP2C20。EP2C20內(nèi)部有18752i邏輯單元,52個M4K RAM塊,共計239K位RAM,26個嵌入式18*18乘法器,4個鎖相環(huán),資源非常豐富,可滿足系統(tǒng)設(shè)計要求。
2 溫度與真空度控制模型
2.1 恒溫或按某預(yù)定溫度曲線的控制模型
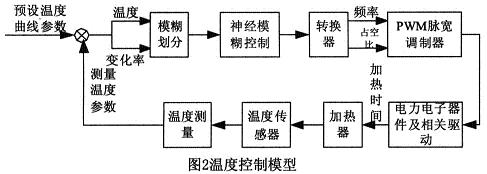
溫度控制模型如圖2所示。溫度控制采用神經(jīng)網(wǎng)絡(luò)模糊控制模型,設(shè)定值和測定值經(jīng)過模糊劃分后,同時送入神經(jīng)模糊控制網(wǎng)絡(luò),生成模糊控制子集,通過轉(zhuǎn)化器產(chǎn)生。PWM脈寬調(diào)制用的頻率值與占空比,然后生成PWM驅(qū)動信號,驅(qū)動電力電子器件,電源輸出給紅外石英管,對真空箱進(jìn)行加熱。通過溫度傳感器及調(diào)整電路,形成溫度值和溫度變化率,根據(jù)溫度值和溫度變化率控制器對輸出頻率和占空比進(jìn)行調(diào)整。
2.2 恒真空度或按某預(yù)定真空曲線的控制模型
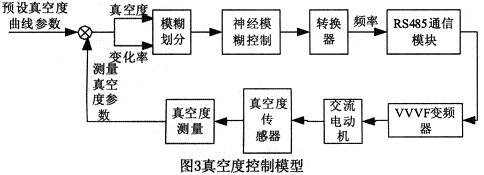
真空度的控制模型與上述溫度控制模型結(jié)構(gòu)相似,不同的是神經(jīng)模糊控制網(wǎng)絡(luò)的輸出不是直接用于電機(jī)的控制驅(qū)動,而是把輸出的頻率量轉(zhuǎn)換成變頻器的遠(yuǎn)程控制信號,通過RS485接口控制變頻器的啟動、停止和頻率設(shè)置,如圖3所示。
2.3 神經(jīng)網(wǎng)絡(luò)選擇與仿真
根據(jù)上述控制模型,比較成熟的BP網(wǎng)絡(luò)選擇的控制神經(jīng)網(wǎng)絡(luò)如圖4所示。神經(jīng)模糊控制器在輸入/輸出參量的選擇,以及模糊論域和模糊子集的確定方面,與一般的模糊控制器沒有什么區(qū)別,只是在推理手段上引入了神經(jīng)網(wǎng)絡(luò)。
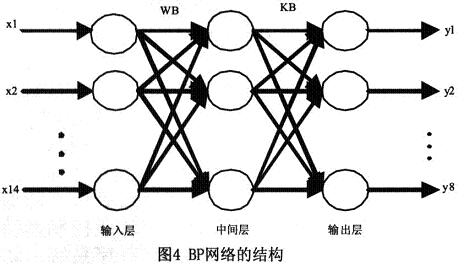
以真空度控制為例來驗(yàn)證控制模型的精確程度。令x1~x7為輸入真空度的模糊子集,x8~x14為輸入真空度變化的模糊子集,y1~y8為輸出空置量的模糊子集,從表1可以看出,共有16條控制規(guī)則。例如,當(dāng)真空度為"合適",變化率為"零"時,抽空時間應(yīng)該為"短",這個樣本可以表示為:
![]()
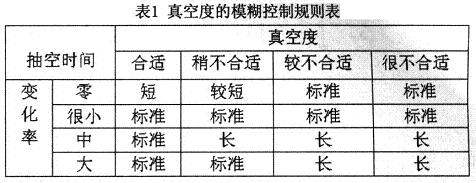
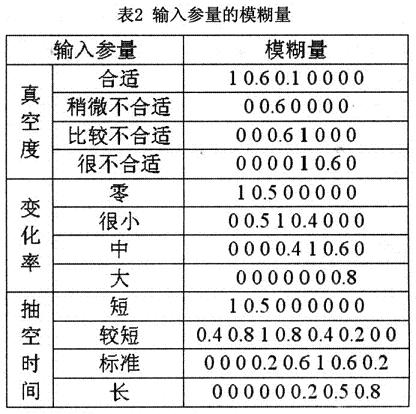
其中,x中的各元素為對應(yīng)的隸屬函數(shù),及模糊自己的賦值。同理可得其他15個樣本,并將它們依次送入神經(jīng)網(wǎng)絡(luò)訓(xùn)練,當(dāng)訓(xùn)練結(jié)束后,神經(jīng)網(wǎng)絡(luò)已經(jīng)記憶了模糊控制規(guī)則,使用時具有聯(lián)想記憶功能。如圖表2所示,為每一個輸入?yún)⒘康哪:俊?/p>
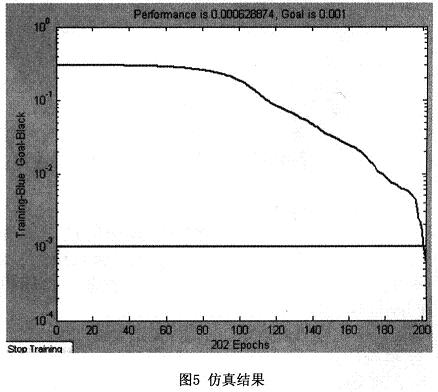
根據(jù)模糊規(guī)則,可得到神經(jīng)網(wǎng)絡(luò)的訓(xùn)練樣本,本次訓(xùn)練假設(shè)目標(biāo)誤差為0.001,訓(xùn)練步數(shù)為1000次,仿真結(jié)果如圖5所示,可以看出,在訓(xùn)練到202次后目標(biāo)誤差達(dá)到要求。
3 總結(jié)
本系統(tǒng)采用了ARM與FPGA的雙核處理器,與現(xiàn)在常用的PLC控制相比,大幅提高了系統(tǒng)功能及運(yùn)算速度,采用FPGA的可重構(gòu)計算技術(shù),可實(shí)現(xiàn)動態(tài)系統(tǒng)的更新與升級,及遠(yuǎn)程系統(tǒng)的更新與維護(hù)。