
??? 摘 要: 在線性負(fù)反饋恒流源" title="恒流源">恒流源基礎(chǔ)上,設(shè)計(jì)了一種新的數(shù)控高精度恒流源。該恒流源使用新型微處理器對電流源負(fù)載電流" title="負(fù)載電流">負(fù)載電流進(jìn)行采樣,使用PID算法在數(shù)字域?qū)Σ蓸訑?shù)據(jù)進(jìn)行處理,將處理結(jié)果轉(zhuǎn)換為模擬信號,反饋到恒流源調(diào)整器" title="調(diào)整器">調(diào)整器,實(shí)現(xiàn)快速數(shù)字閉環(huán)反饋控制。測試結(jié)果表明,在輸出電流10mA~2010mA范圍內(nèi),電流紋波≤0.06mA,輸出電流與設(shè)定電流相對誤差≤1%,電流調(diào)節(jié)最小步進(jìn)值為1mA。
??? 關(guān)鍵詞: 恒流源? 微處理器? PID算法? A/D" title="A/D">A/D轉(zhuǎn)換器? D/A" title="D/A">D/A轉(zhuǎn)換器? 運(yùn)算放大器
?
??? 恒流電源是為電流型負(fù)載提供穩(wěn)定電流的重要儀器。常見的恒流源電路方案有:脈沖調(diào)寬式、線性負(fù)反饋方式[1-2]等。脈沖調(diào)寬式(開關(guān)式)恒流源通過改變調(diào)整器的工作脈沖寬度達(dá)到恒流的目的。目前廣泛應(yīng)用于空間技術(shù)、計(jì)算機(jī)、通訊、家電等領(lǐng)域中。這種恒流源調(diào)整器工作在開關(guān)狀態(tài)、功率損耗小、效率高達(dá)70%~95%,但紋波電流大,輻射干擾強(qiáng)、恒流精度低。線性負(fù)反饋式恒流源通過改變調(diào)整器的工作電壓,使其輸出電流保持恒定,具有失真小、穩(wěn)定度高、紋波小等特點(diǎn),但功率損耗大、效率較低,主要應(yīng)用于高精度場合。
?? PID控制是根據(jù)系統(tǒng)的誤差,利用比例、積分、微分計(jì)算出控制量,對系統(tǒng)進(jìn)行控制的一種方法[3]。PID控制問世至今已有近70年歷史,它以結(jié)構(gòu)簡單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)控制的主要技術(shù)之一。比例控制是一種最簡單的控制方式,其控制器的輸出信號與輸入誤差信號成比例關(guān)系;積分控制是輸出信號與輸入誤差信號的積分成正比關(guān)系;微分控制的輸出信號與輸入誤差信號的微分(即誤差的變化率)成正比關(guān)系。在本系統(tǒng)中,使用比例積分(PD)控制。
??? 本文在線性負(fù)反饋式恒流源基礎(chǔ)上,利用新型微處理器AT89S52[4]對實(shí)時(shí)負(fù)載電流進(jìn)行采樣,然后根據(jù)用戶設(shè)定的電流值使用工業(yè)控制上成熟的PID算法進(jìn)行處理,最后根據(jù)算法結(jié)果對恒流源進(jìn)行反饋控制,從而大大提高了系統(tǒng)的恒流精度和穩(wěn)定度。同時(shí),利用微處理器資源,還提供了鍵盤控制和電流數(shù)值顯示等功能。
1 系統(tǒng)硬件結(jié)構(gòu)
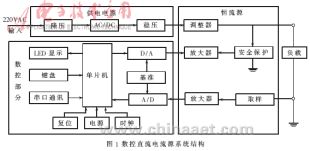
??? 整機(jī)系統(tǒng)結(jié)構(gòu)如圖1所示,由供電電源、數(shù)控部分、恒流源三大部分構(gòu)成。供電電源為整個(gè)系統(tǒng)提供需要的穩(wěn)定電源;恒流源是系統(tǒng)的核心部分,它本身是一個(gè)獨(dú)立的線性負(fù)反饋恒流源,它的性能好壞直接影響系統(tǒng)的精度;數(shù)控部分是附加在恒流源上的一個(gè)獨(dú)立系統(tǒng),它在數(shù)字域控制恒流源,并響應(yīng)用戶的設(shè)定,顯示電流數(shù)值。
??????????????????? 
1.1 恒流源部分
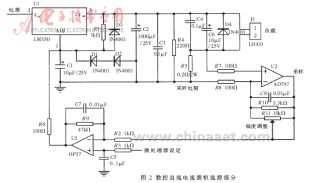
??? 恒流源部分本身是一個(gè)獨(dú)立的線性負(fù)反饋恒流源,如圖2所示。U1(LM350A)為調(diào)整器,是恒流源的核心部件。負(fù)載電流經(jīng)采樣電阻R5,產(chǎn)生微弱的采樣電壓,經(jīng)過超低噪聲運(yùn)算放大器U2同相放大。放大的電壓信號送往由U3組成的差分放大器的負(fù)端(同時(shí)送往數(shù)控部分進(jìn)行A/D轉(zhuǎn)換)。差分放大器把負(fù)端采樣電壓與正端的數(shù)控部分設(shè)定電壓的差值進(jìn)行放大,輸出到調(diào)整器的調(diào)整端,形成閉環(huán)反饋。若有某種情況使負(fù)載電流增加,則采樣電阻上的電壓增加,使同相放大器U2輸出電壓變大,差分放大器輸出電壓減小,調(diào)整器調(diào)整端電壓減小,調(diào)整器輸出電壓變低,使負(fù)載電流減小,從而維持了負(fù)載電流的動(dòng)態(tài)穩(wěn)定,反之亦然。可以看出,差分放大器的正端決定了負(fù)載電流的大小。若U3正端電壓升高,則調(diào)整器調(diào)整端電壓升高,調(diào)整器輸出電壓升高,負(fù)載電流增加,同相放大器輸出增加,差分放大器負(fù)端電壓升高,直到U3正負(fù)端電壓相等,系統(tǒng)再次動(dòng)態(tài)穩(wěn)定。
??????????????????? 
??? 采樣電阻串聯(lián)在負(fù)載回路內(nèi),并由此檢測負(fù)載電流變化。因此,采樣電阻的穩(wěn)定性將直接影響到恒流源的性能,且采樣電阻還應(yīng)有足夠大的功率,否則也會(huì)影響恒流源的性能甚至燒壞。綜合以上各因素,在實(shí)際電路中選用大功率錳銅材料制成的精密電阻,其溫度系數(shù)達(dá)到(-3~+20)10-6/℃。
??? 采樣放大器U2選用超低噪聲運(yùn)放AD797。因?yàn)樗幱陂]環(huán)反饋的第一級,所以要盡量減小噪聲的影響。
差分放大器U3選用高精度運(yùn)放OP07,提供高精度的比較結(jié)果。
????過熱、過流、過壓保護(hù)功能由三端穩(wěn)壓芯片LM350內(nèi)部提供。
??? 為了使電路在未加負(fù)載時(shí)仍處于線性工作狀態(tài),還要有一定預(yù)負(fù)載。預(yù)負(fù)載電流一般取:
??? IR0=IOMax/(20-50)
??? 預(yù)負(fù)載電阻R4取220Ω,功率為2W。
??? D4是為了防止引線較長使線路中出現(xiàn)反向感應(yīng)電壓而損壞電路。加上D4可使反向感應(yīng)電壓經(jīng)過D4構(gòu)成閉合回路,從而保護(hù)電路。
1.2 數(shù)控部分
??? 數(shù)控部分主要由微處理器模塊、A/D模塊、D/A模塊、鍵盤模塊、顯示模塊、復(fù)位模塊等組成。微處理器是整個(gè)數(shù)控部分的處理控制中心;A/D模塊完成模擬信號到數(shù)字信號的轉(zhuǎn)換;D/A模塊完成數(shù)字信號到模擬信號的轉(zhuǎn)換;鍵盤模塊給用戶提供控制接口;顯示模塊根據(jù)需要顯示相應(yīng)的電流值;復(fù)位模塊為整個(gè)數(shù)控部分提供可靠的復(fù)位信號。
??? 數(shù)控部分主要完成以下幾個(gè)任務(wù):(1)響應(yīng)用戶的按鍵操作,保存用戶設(shè)定的電流值。(2)控制A/D模塊按照一定的周期將采樣信號(圖2中U2的輸出)數(shù)字化。(3)在微處理器內(nèi)部按照PID算法根據(jù)用戶設(shè)定值對采樣數(shù)據(jù)進(jìn)行處理。(4)將處理結(jié)果通過D/A模塊轉(zhuǎn)換為模擬信號,輸出到恒流源差分比較器的正端,完成數(shù)控部分對恒流源部分的控制。(5)按照用戶的需要顯示相應(yīng)的電流值。
??? 微處理器選用ATMEL公司的AT89S52單片機(jī)。AT89S52是一種低功耗、高性能CMOS工藝的8位單片機(jī),與標(biāo)準(zhǔn)MCS-51的引腳和指令完全兼容。
??? 為了滿足取樣精度及轉(zhuǎn)換精度,選取12位的A/D芯片AD574和12位的D/A芯片DAC1230。在輸出2000mA情況下,控制精度可達(dá)2000mA/212≈0.5mA。
??? 顯示模塊選用MAX7219,串行接口,可以直接驅(qū)動(dòng)8位數(shù)碼管。
??? 鍵盤模塊直接使用微處理器的通用I/O口。
??? 復(fù)位模塊選用MAX813,具有上電復(fù)位功能、低壓復(fù)位功能以及內(nèi)部集成看門狗和比較器。
1.3 供電電源
??? 電源部分使用單輸入三輸出變壓器,將市電(220V/50Hz)轉(zhuǎn)換為兩路17V和一路9V的交流電源。分別使用通用的三端穩(wěn)壓芯片LM350A、LM337、LM7805將三路交流電源整流為系統(tǒng)所需的三種直流電源:+15V(3A)、-15V(1.5A)、+5V(1A)。其中+15V電源為恒流源、A/D轉(zhuǎn)換器、D/A轉(zhuǎn)換器、運(yùn)算放大器提供正電源;-15V電源為A/D轉(zhuǎn)換器、D/A轉(zhuǎn)換器提供負(fù)電源;+5V電源為數(shù)控部分提供工作電源。三種電源都設(shè)計(jì)了必要的保護(hù)電路、指示燈及預(yù)負(fù)載電路,以保證其正常、穩(wěn)定地工作。
2 軟件設(shè)計(jì)
??? 程序分主程序和中斷程序兩大塊。主程序處理用戶的按鍵和顯示,中斷程序處理A/D轉(zhuǎn)換、PID算法、D/A轉(zhuǎn)換等任務(wù)。
主程序中,首先初始化寄存器和外圍芯片,設(shè)置相應(yīng)的變量。然后反復(fù)地調(diào)用鍵盤掃描模塊和顯示模塊。
??? 中斷程序包括定時(shí)器中斷和外部中斷。利用微處理器的定時(shí)器資源,設(shè)置130ms的定時(shí)器。在定時(shí)器中斷程序中,啟動(dòng)A/D轉(zhuǎn)換模塊,然后退出中斷程序。
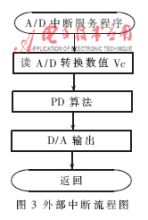
??? 當(dāng)A/D轉(zhuǎn)換完成時(shí),觸發(fā)微處理器的外部中斷。在外部中斷程序中,讀取最新的采樣數(shù)據(jù),調(diào)用PID算法,根據(jù)用戶設(shè)定值進(jìn)行處理,接著調(diào)用D/A模塊,將處理結(jié)果轉(zhuǎn)換為模擬信號并輸出,最后退出中斷程序。外部中斷流程圖如圖3所示。
????????????????????????????? 
??? 這樣設(shè)計(jì)的好處是,可以保證固定的采樣周期,使整個(gè)系統(tǒng)運(yùn)行穩(wěn)定。將不需要及時(shí)作出響應(yīng)的鍵盤及顯示放在主程序中,有利于節(jié)省微處理器的資源。
3 性能測試
??? 恒流源使用時(shí),先加上負(fù)載,預(yù)熱30分鐘,使系統(tǒng)內(nèi)部溫度達(dá)到平衡狀態(tài),然后開始測量。在設(shè)定不同的電流值后,利用5位半數(shù)字萬用表測量實(shí)際的電流值并和數(shù)控部分顯示的電流值進(jìn)行比較,利用示波器檢測電流的波動(dòng),并給出紋波和絕對誤差,如表1所示。
???????????????????????? 
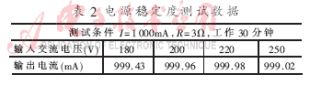
??? 在改變輸入電源電壓的情況下,測量電流值如表2所示。
?????????????????????????? 
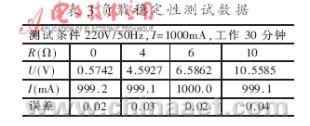
??? 在改變負(fù)載的情況下,測量電流值,如表3所示。
??????????????????????????
??? 在傳統(tǒng)的線性負(fù)反饋恒流源的基礎(chǔ)上,增加微處理器控制,通過測量負(fù)載電流,與設(shè)定值比較,使用PID算法,根據(jù)算法結(jié)果調(diào)整電流值,大大提高了恒流源的性能。利用此原理,用戶按照自己的需要,增加相應(yīng)的功能,很容易做出各種實(shí)用的高精度電流源。
參考文獻(xiàn)
[1]?曲學(xué)基,王增福,曲敬鎧.穩(wěn)定電源基本原理與工藝設(shè)計(jì). 北京:電子工業(yè)出版社,2004.
[2]?何希才,姜余祥.新型穩(wěn)壓電源及其應(yīng)用.北京:國防工業(yè)出版社,2002.
[3]?陶永華,尹怡欣,葛蘆生.新型PID控制及其應(yīng)用:第2版.北京:機(jī)械工業(yè)出版社,2003.
[4]?李玉峰,倪虹霞.MCS-51系列單片機(jī)原理與接口技術(shù).北京:人民郵電出版社,2004.