
摘 要: 研究了線陣" title="線陣">線陣CCD測徑系統(tǒng)的硬件設計。從CCD傳感器的電荷產(chǎn)生、轉(zhuǎn)移原理入手,針對CCD傳感器的信號特點進行系統(tǒng)硬件設計,完成CCD的驅(qū)動電路、信號放大電路、A/D" title="A/D">A/D轉(zhuǎn)換電路、數(shù)據(jù)存儲電路及與計算機的數(shù)據(jù)通信,將CCD表面的亮度變化再現(xiàn)于計算機上。測試結(jié)果表明,該系統(tǒng)成功實現(xiàn)了CCD的光電轉(zhuǎn)換、串行數(shù)據(jù)輸出、數(shù)據(jù)采集與顯示,能夠用于工業(yè)生產(chǎn)中的長度測量 。
關(guān)鍵詞: CCD傳感器 相關(guān)雙采樣 像素 勢阱
自二十世紀80年代開始,攝影技術(shù)出現(xiàn)了革命性的突破,即電荷耦合器件CCD(Charged Coupled Device)的廣泛應用。目前,CCD技術(shù)已發(fā)展成一項具有廣泛應用前景的新技術(shù),成為現(xiàn)代光電子學與測試技術(shù)中最受關(guān)注的研究熱點之一。例如,在國防軍事領(lǐng)域,CCD成像技術(shù)在微光、夜視、遙感應用中發(fā)揮著巨大的作用,適應了現(xiàn)代高技術(shù)戰(zhàn)爭的需求,成為軍事微電子學的研究熱門;在科研領(lǐng)域,由于其靈敏度高、噪聲低,成為研究宏觀(如天體)和微觀(如生物細胞)現(xiàn)象不可缺少的工具;CCD具有成本低、小而輕的特點,在圖像通信領(lǐng)域也獲得了廣泛的用途;在工程測量領(lǐng)域,CCD在工件尺寸測量、工件表面質(zhì)量檢測、物體熱膨脹系數(shù)測量、光強分布測量等方面都有很好的應用。
在生產(chǎn)實際中,許多場合需要對一維尺寸進行測量,例如對帶、管、條等的測量。采取傳統(tǒng)的先加工后測量的方法,勞動強度大,信息反饋慢,直接影響了線材的質(zhì)量和生產(chǎn)效益。因此,必須有一套高精度的實時在線檢測系統(tǒng),一方面可使生產(chǎn)人員及時了解線徑的大小及偏差,一方面給生產(chǎn)機構(gòu)伺服系統(tǒng)提供正比于偏差的反饋量,實現(xiàn)反饋控制。
本課題研制了一套用線陣CCD對線材直徑進行非接觸實時測量的系統(tǒng),可應用于工業(yè)生產(chǎn)中。
1 CCD電荷的產(chǎn)生、轉(zhuǎn)移原理
CCD是由一系列排得很緊密的MOS電容器組成,每一個光敏像元就是一個MOS電容器。它的突出特點是以電荷作為信號,實現(xiàn)電荷的存儲和電荷的轉(zhuǎn)移。
1.1 CCD光電轉(zhuǎn)換
當在MOS電容器的柵極上加上一個小的正電壓時,半導體中的自由空穴被排斥到遠離柵極的一邊,在SiO2的表面下形成一層電子的耗盡區(qū),當柵壓繼續(xù)增加,耗盡層將進一步向半導體內(nèi)延伸,這一耗盡層對于帶負電荷的電子而言是一個勢能特別低的區(qū)域,因此也叫做勢阱[1]。正柵壓進一步增加,在界面上的電子層形成反型層。
當光入射到耗盡區(qū)時,因內(nèi)光電效應將產(chǎn)生電子-空穴對(硅吸收能量釋放價電子,形成電子-空穴對),在耗盡區(qū)電場作用下,空穴流入襯底底部,電子則積存于半導體表面,這樣勢阱中就積存了一定量的電荷,且勢阱中積存的電荷量與入射光強度成正比(CCD飽和的情況除外)。
1.2 CCD像素輸出
CCD 信號電荷的傳輸是通過控制各個像素上的電極電壓,電荷就會從電壓低的電極轉(zhuǎn)移到電壓高的電極下,使信號電荷隨著電極電壓的周期性變化在半導體表面或者體內(nèi)做定向運動。
線陣CCD電荷包只單方向傳遞,每一個掃描周期,所有像素都沿著電極相繼傳遞,進行像素的水平移動,直到所有像素全部輸出。
2 線陣CCD測徑系統(tǒng)硬件設計
本測徑系統(tǒng)具有以下特點:
(1)采用的CCD為EG&G RETICON公司的RL512EC/17線陣傳感器芯片;
(2) 采用高集成度的XC9572PC44芯片產(chǎn)生系統(tǒng)所需的驅(qū)動和控制時序邏輯;
(3) 由外部PC機編程實現(xiàn)對CCD積分、時間、大小和數(shù)據(jù)采集工作過程的控制;
(4) 應用了內(nèi)帶采樣保持的8位高速并行輸出A/D芯片TLC5510進行模數(shù)轉(zhuǎn)換;
(5) 通過計算機串口實現(xiàn)對數(shù)據(jù)信息的傳輸。
系統(tǒng)結(jié)構(gòu)原理框圖如圖1所示。

系統(tǒng)具體的工作過程:由CPLD產(chǎn)生CCD傳感器所需的工作時序,再經(jīng)時鐘驅(qū)動電路產(chǎn)生時序和偏置都滿足CCD要求的信號,驅(qū)動CCD輸出模擬視頻信號;該信號經(jīng)放大、A/D轉(zhuǎn)換得到8位數(shù)字信號存儲于CPLD中,再經(jīng)芯片NS16C552和MAX202轉(zhuǎn)換為串行數(shù)據(jù),輸入計算機進行顯示。
CPLD芯片內(nèi)部分為兩部分:一部分是視頻信號處理控制時序發(fā)生器,它提供CCD視頻信號處理(如A/D轉(zhuǎn)換、數(shù)字信號存取等)所需的各種同步控制時序;另一部分是CCD驅(qū)動時序發(fā)生器。
2.1 時序信號發(fā)生電路
本文采用的CCD傳感器為EG&G RETICON公司的RL512EC/17線性傳感器, 具有512個有效像素,像素信號輸出方式為串行視頻輸出。該傳感器具有高分辨率、高靈敏度、低噪聲、低功耗的特點,最大掃描頻率10MHz。
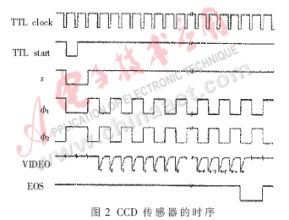
RL512EC/17各驅(qū)動信號" title="驅(qū)動信號">驅(qū)動信號及輸出信號時序如圖2所示。
驅(qū)動CCD所需的信號由CPLD編程產(chǎn)生,本系統(tǒng)采用一片XC9572PC44芯片實現(xiàn)時序發(fā)生器的功能。該系列芯片是Xilinx公司典型的可通過JTAG在線編程的CPLD器件[3]。
首先由CPLD產(chǎn)生符合時序要求的初始驅(qū)動信號TTL clk和TTL start,這兩路信號必須經(jīng)后面的偏置電路處理后才能得到最終的驅(qū)動信號s、Φ1、Φ2。因為TTL clk和TTL start均為TTL電平,低電平0V,高電平" title="高電平">高電平+5V,而CCD要求的驅(qū)動信號為低電平-7V,高電平+5V,必須進行電平轉(zhuǎn)換:TTL start信號驅(qū)動三極管,該三極管發(fā)射極和集電極分別接+5V和-8V,得到CCD所需的高電平+5V,低電平-7V的開始信號s;同時TTL clk經(jīng)74LS74觸發(fā)的兩路反相" title="反相">反相時鐘通過DS0026芯片變換為高電平+5V、低電平-7V的兩路時鐘信號Φ1、Φ2。DS0026為專用電平轉(zhuǎn)換芯片,輸出電平與外接電壓電平一致,高低壓差最大20V[4]。
直接驅(qū)動RL512EC/17的信號共有三個:開始信號s,互為反相的兩路時鐘信號Φ1、Φ2。開始信號s為低電平的時間就是傳感器的曝光時間,由軟件編程控制。s為高電平時進行電荷轉(zhuǎn)移,此時每一個Φ1、Φ2周期CCD就向外電路輸出一個像素,該像素值就是圖2中的VIDEO信號。所有像素移出后,EOS信號輸出一個低脈沖,該信號用于測試。
s脈沖用來初始化每一次掃描,兩次s負脈沖之間的間隔就是一次掃描的時間TL,該時間必須滿足(N+2)/fs≤TL≤40ms,其中fs為掃描頻率,N為像素數(shù)512。不大于40ms是為了保證積累的暗泄漏電荷不超過輸出信號飽和值的1%(CCD輸出電荷的飽和值為4pC,泄漏電荷在室溫下為1pA,經(jīng)40ms積累得到0.04pC的泄漏電荷)。本文采用fs=2.5MHz,TL=40μs。
2.2 視頻信號放大、采樣電路
CCD輸出的視頻模擬信號比較微弱,必需經(jīng)過放大后才能進行A/D轉(zhuǎn)換。由于CCD輸出的信號電壓為負值,在放大的同時要將其轉(zhuǎn)換為正值,因此筆者將運算放大電路設計為反相放大的形式。另外,該CCD為電流輸出,運放反相端的接地電阻必須較大,否則CCD輸出的微弱電流將不會引起電壓的明顯變化。本系統(tǒng)采用的CCD要求運算放大器在掃描頻率(本文為2.5MHz)時的閉環(huán)增益至少為40dB。在電路設計中,選用了AD8009運算放大器[5]。
放大后的模擬信號必須進行模/數(shù)轉(zhuǎn)換才能進行下一步的存儲、顯示。在該系統(tǒng)的設計中,選用8位高速并行的A/D芯片TLC5510完成A/D轉(zhuǎn)換工作[6],其內(nèi)部自帶采樣保持電路,這在一定程度上簡化了外圍電路的設計。TLC5510的轉(zhuǎn)換速率(20MHz)完全可以滿足CCD(2.5MHz)的工作要求。A/D轉(zhuǎn)換的時鐘信號和使能信號由CPLD產(chǎn)生。采樣后的數(shù)據(jù)存儲于CPLD中。
2.3 I/O電路
考慮到本文使用的線陣CCD數(shù)據(jù)量較小、速率較低,采用串口與計算機進行通信能夠滿足CCD與計算機間的數(shù)據(jù)通信需要。NS16C552和MAX202芯片組成的串口電路與CPLD連接,將CPLD送出的并行數(shù)據(jù)轉(zhuǎn)換為串行輸出,像素信息便可傳送至計算機進行處理、顯示。
3 測試結(jié)果
在對該系統(tǒng)軟硬件設計和測試成功后,將采集到的數(shù)據(jù)傳入計算機,根據(jù)這些數(shù)據(jù)恢復出CCD傳感器表面不同位置的亮度。光源分別在CCD遮蓋半邊、遮蓋中間以及從CCD的一側(cè)斜射的情況下照射,將采集的數(shù)據(jù)進行亮度仿真,具體的仿真結(jié)果如圖3所示。

仿真結(jié)論:
(1)仿真結(jié)果顯示的明暗變化能夠準確反映CCD表面的光照情況。
(2)在(a)、(b)兩圖中,遮蓋部分與光照部分之間存在亮度過渡區(qū)。這是由于CCD本身的感光單元有一定間距,加上照明光源在視場內(nèi)光強分布的不均勻性,CCD本身的光敏不均勻性(PRUN)、轉(zhuǎn)移損失,以及光源在通過待測目標邊緣時的衍射現(xiàn)象等原因,使得CCD輸出包絡的邊緣必然帶有明顯的梯度。或者說,目標尺寸的兩個邊緣在CCD上成像的具體位置不可能十分確定,導致CCD輸出信號波形在輪廓邊緣處有一漸緩的過渡區(qū),而且這一過渡區(qū)隨著輪廓在視場中位置的變化而變化。
(3)證明了熱噪聲對CCD性能的影響十分明顯。在系統(tǒng)剛通電和長時間通電后分別采集數(shù)據(jù),發(fā)現(xiàn)長時間通電之后的仿真圖像明顯疊加了大量黑點,圖像較模糊。這是由于CCD的絕大多數(shù)噪聲來源于熱噪聲,隨著通電時間加長,溫度升高,噪聲急劇增加。
本系統(tǒng)沒有涉及到光學設備,另外CCD的噪聲問題本文也沒有詳細討論,如熱噪聲和復位噪聲等對系統(tǒng)的性能有很大影響,這些問題的解決是筆者下一步要進行的工作。
參考文獻
1 Chris Park,David Losee.Large area interline CCD with low dark current. http://www.kodak.com,2003
2 Steve B.Howell. Handbook of CCD astronomy.http://www.cup.cam.ac.uk.
3 Datasheet of XC9572 In-System Programmable CPLD.http:// www.xilinx.com,2003
4 Datasheet of DS0026 5 MHz Two Phase MOS Clock Driver.http://www.national.com,2000
5 Datasheet of AD8009 Low Distortion Amplifier.http://www.analog.com, 2004
6 Datasheet of TLC5510, TLC5510A. http://www.ti.com,1999