
摘 要: 介紹了小區(qū)模糊變頻調(diào)速" title="變頻調(diào)速">變頻調(diào)速恒壓控制系統(tǒng)的控制原理、軟硬件設(shè)計(jì)及仿真結(jié)果。
關(guān)鍵詞: 模糊控制" title="模糊控制">模糊控制 恒壓供水 變頻調(diào)速 單片機(jī)
在傳統(tǒng)的小區(qū)供水方式中,由于揚(yáng)水較高且電機(jī)一直高速運(yùn)行,造成的電能消耗比較大,幾乎占到水費(fèi)成本的一半以上。變頻調(diào)速是一項(xiàng)有效的節(jié)能降耗技術(shù),節(jié)電率很高,一般可節(jié)電20%~40%。由于其具有調(diào)速精度高、功率因數(shù)高等特點(diǎn),采用它可以提高出水質(zhì)量、降低物料和設(shè)備的損耗,同時(shí)也能減少機(jī)械磨損和噪聲。
小區(qū)用水具有以下幾個(gè)特點(diǎn):(1)用水變化量大;(2)對(duì)水壓的要求比較高;(3)流量基本上由用戶控制。針對(duì)這些特點(diǎn),本文提出一種基于模糊控制理論的新型恒壓供水系統(tǒng)。它與傳統(tǒng)的供水系統(tǒng)相比,不但可使水壓保持恒定、節(jié)電節(jié)水,而且靈活性高、占地面積小、投資省、操作方便、運(yùn)行可靠,具有良好的經(jīng)濟(jì)和社會(huì)效益。
1 系統(tǒng)的控制原理
本系統(tǒng)具備同時(shí)控制多臺(tái)水泵的功能。根據(jù)不同場(chǎng)合、不同需要可以采取多臺(tái)水泵同時(shí)運(yùn)行、定時(shí)換泵等多種工作方式。水泵電機(jī)全部軟啟動(dòng),以先啟先停為原則。本系統(tǒng)具有變頻器頻率顯示和實(shí)時(shí)壓力顯示;具有變頻器故障、遠(yuǎn)傳表故障、欠壓超時(shí)和水位報(bào)警指示。

本系統(tǒng)以單片機(jī)為核心,在水泵的出水管道上安裝一個(gè)壓力傳感器,用于檢測(cè)管道壓力,并把其壓力信號(hào)變成0~5V的模擬電信號(hào),送到單片機(jī)系統(tǒng)的A/D" title="A/D">A/D轉(zhuǎn)換器輸入端,經(jīng)A/D轉(zhuǎn)換后變成相應(yīng)的數(shù)字信號(hào),送入單片機(jī)進(jìn)行數(shù)據(jù)處理。經(jīng)單片機(jī)運(yùn)算后的壓力值與設(shè)定的壓力值進(jìn)行比較,得出偏差值,再經(jīng)PID調(diào)節(jié)得出控制參數(shù),然后經(jīng)D/A" title="D/A">D/A轉(zhuǎn)換后變成0~10V的模擬信號(hào),送入變頻器控制其輸出頻率的大小,以此改變水泵的電機(jī)轉(zhuǎn)速,從而達(dá)到控制管道壓力的目的。當(dāng)實(shí)際管道壓力小于給定壓力時(shí),變頻器輸出頻率升高,電機(jī)轉(zhuǎn)速加快,管道壓力升高;反之,變頻器頻率降低,電機(jī)轉(zhuǎn)速減小,管道壓力降低。如此上下調(diào)整多次,直到偏差值為零為止。這樣,實(shí)際壓力值圍繞設(shè)定壓力值上下波動(dòng)而穩(wěn)定,從而保持供水壓力恒定。
2 控制系統(tǒng)的硬件設(shè)計(jì)
基于單片機(jī)的變頻恒壓供水控制系統(tǒng)的硬件結(jié)構(gòu)框圖如圖1所示。系統(tǒng)以AT89C52單片機(jī)作為整個(gè)系統(tǒng)的控制核心,應(yīng)用其強(qiáng)大的接口功能,構(gòu)成整個(gè)恒壓供水控制的硬件系統(tǒng)。
本系統(tǒng)硬件主要由A/D轉(zhuǎn)換器、D/A轉(zhuǎn)換器、鍵盤(pán)、顯示系統(tǒng)、電源、故障檢測(cè)電路以及時(shí)鐘系統(tǒng)等幾部分組成。各模塊的主要功能如下:(1)A/D轉(zhuǎn)換器的功能是把水管的壓力信號(hào)經(jīng)傳感器轉(zhuǎn)換成0~5V的模擬電壓信號(hào),再變成數(shù)字信號(hào),然后送入單片機(jī);(2)D/A轉(zhuǎn)換器的功能是把實(shí)際水壓與設(shè)定壓力之差經(jīng)單片機(jī)處理后而輸出的數(shù)據(jù)(8位立即數(shù))轉(zhuǎn)換成模擬電壓信號(hào),用以控制變頻器的輸出頻率,從而控制電機(jī)的轉(zhuǎn)速,達(dá)到控制水壓的目的;(3)鍵盤(pán)用于通過(guò)人機(jī)對(duì)話的方式監(jiān)控系統(tǒng),例如改變系統(tǒng)的壓力設(shè)定值等參數(shù)、換水泵的時(shí)間、水泵的工作方式等;(4)顯示系統(tǒng)用于顯示系統(tǒng)的工作狀態(tài),如設(shè)定的水壓值、實(shí)際水壓值、缺水和漏水警報(bào)等;(5)故障檢測(cè)電路用于監(jiān)測(cè)變頻器、水泵以及蓄水池的狀態(tài)。
3 模糊控制器" title="模糊控制器">模糊控制器設(shè)計(jì)
由于供水系統(tǒng)管網(wǎng)較長(zhǎng),流量變化緩慢,水壓的調(diào)節(jié)有較大的滯后性,所以難以建立一個(gè)精確的數(shù)學(xué)模型,用傳統(tǒng)的PID調(diào)節(jié)器難以獲得滿意的效果。模糊PID控制是結(jié)合PID控制和模糊控制而得出的一種新型控制方式。模糊控制器的優(yōu)點(diǎn)是不要求掌握受控對(duì)象的精確的數(shù)學(xué)模型。筆者對(duì)模糊PID調(diào)節(jié)器與傳統(tǒng)的PID調(diào)節(jié)器進(jìn)行了Matlab仿真比較,如圖2所示。其中曲線1是PID調(diào)節(jié)器的仿真曲線,曲線2是模糊PID調(diào)節(jié)器的仿真曲線。從圖2中可以看出,曲線2的動(dòng)態(tài)響應(yīng)要比曲線1快得多,而且靜態(tài)誤差也比較小。因此,模糊PID控制器在控制過(guò)程的前期階段具有模糊控制器的優(yōu)點(diǎn)(動(dòng)態(tài)響應(yīng)快),而在控制過(guò)程的后期階段又具有PID調(diào)節(jié)器的優(yōu)勢(shì)(靜態(tài)誤差小)。故本文采用的模糊PID控制器比傳統(tǒng)PID調(diào)節(jié)器具有優(yōu)越的性能。
從理論上講,模糊控制器的維數(shù)越高,控制越精細(xì)。但是維數(shù)越高,模糊控制規(guī)則變的越復(fù)雜,控制算法實(shí)現(xiàn)起來(lái)越困難。基于以上分析,本文采用二維模糊控制器,輸入量為誤差量(E)和誤差的變化量(EC),輸出量為控制量的變化(U)。
E、EC和U的論域被劃分為15個(gè)等級(jí),即為:
E={-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}
EC={-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}
U={-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}
模糊子集的劃分及其賦值:
確定描述E、EC和U的模糊語(yǔ)言變量為:負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大。用符號(hào)表示為:NB,NM,NS,ZE,PS,PM,PB。即
E=EC=U={ NB,NM,NS,ZE,PS,PM,PB}
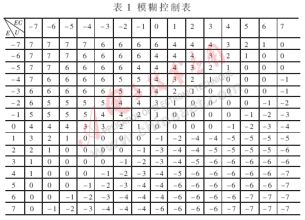
根據(jù)小區(qū)實(shí)際供水情況和操作人員的實(shí)踐經(jīng)驗(yàn),總結(jié)出模糊控制規(guī)則表,由控制規(guī)則按模糊推理合成規(guī)則求出相應(yīng)的控制決策U,再按隸屬度最大值的原則得到相應(yīng)的控制量,經(jīng)計(jì)算機(jī)離線計(jì)算并反復(fù)調(diào)試修正,最后得到實(shí)際應(yīng)用的模糊控制表,如表1所示。將該表存于單片機(jī)中,系統(tǒng)運(yùn)行時(shí)先根據(jù)輸入數(shù)據(jù)計(jì)算出E、EC,然后將它們量化求出模糊量的論域值,接著查找模糊控制表獲得控制量,再乘以比例系數(shù)即可得到輸出量,最后將其送到D/A轉(zhuǎn)換器轉(zhuǎn)換成模擬量去控制變頻器。系統(tǒng)的模糊控制原理圖如圖3所示,具體的模糊控制子程序流程圖如圖4所示。
?

參考文獻(xiàn)
1 L.A.Zadeh.Fuzzy control:issues,contentions and perspectives. San Franscisco,USA:Proc.of 13th IFAC Word Congress,1996
2 A.Kandel.,G.Langholz.(Eds)Fuzzy control.Prentice Hall,Englewood Cliffs,NJ.,1994
3 胡漢才.單片機(jī)原理及其接口技術(shù). 北京:清華大學(xué)出版社,2004
4 韓安榮. 通用變頻器及其應(yīng)用. 北京:機(jī)械工業(yè)出版社,2000
5 李士勇.模糊控制,神經(jīng)控制和智能控制論.哈爾濱:哈爾濱工業(yè)大學(xué)出版社,1997
6 余永權(quán).單片機(jī)模糊邏輯控制.北京:北京航空航天大學(xué)出版社,1995