
1 前言
溫度是表征環(huán)境的一個(gè)重要的參數(shù)。在工程領(lǐng)域,尤其像工程熱力學(xué)等,溫度檢測(cè)非常普遍,對(duì)溫度精確測(cè)量以便實(shí)時(shí)控制也顯得尤為重要。
在控制系統(tǒng)中,上位機(jī)與下位機(jī)之間實(shí)現(xiàn)通信的方法和應(yīng)用平臺(tái)很多。目前,以VB和VC開發(fā)的通信軟件較多,然而,這類軟件雖然功能完善,但是數(shù)據(jù)采集到計(jì)算機(jī)后要進(jìn)行各種處理(例如濾波,系統(tǒng)辨識(shí),曲線擬合等)就顯得不方便,編程比較復(fù)雜。Matlab具有強(qiáng)大的數(shù)據(jù)處理能力及功能豐富的工具箱,被廣泛的應(yīng)用于信號(hào)處理、自動(dòng)控制等領(lǐng)域[1]。它編程語言簡(jiǎn)單易學(xué),利用簡(jiǎn)單的命令就可以代替復(fù)雜的代碼,極大地提高了開發(fā)效率。
本實(shí)驗(yàn)基于Matlab環(huán)境下設(shè)計(jì)了一個(gè)小型溫度檢測(cè)系統(tǒng),下位機(jī)使用AT89S51單片機(jī)和DS18B20完成溫度數(shù)據(jù)采集,上位機(jī)在Matlab環(huán)境下,調(diào)用設(shè)備控制箱serial類操作RS-232串口,用串行通信方式交換數(shù)據(jù),進(jìn)而借助Matlab對(duì)數(shù)據(jù)進(jìn)行分析和處理,得到了溫度隨時(shí)間變化的函數(shù)解析式,同時(shí)介紹了基于Matlab環(huán)境下PC機(jī)與單片機(jī)串行通信的實(shí)時(shí)數(shù)據(jù)處理的實(shí)現(xiàn)方法。
2 系統(tǒng)總體設(shè)計(jì)
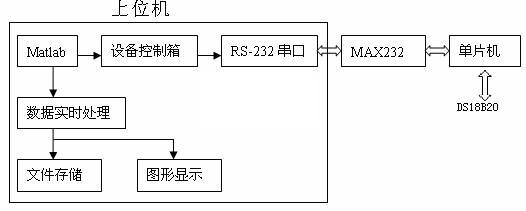
圖1 系統(tǒng)結(jié)構(gòu)圖
溫度檢測(cè)系統(tǒng)的整體結(jié)構(gòu)如圖1所示。PC機(jī)串口與單片機(jī)USART口通過MAX232電平轉(zhuǎn)換芯片相連,構(gòu)成一個(gè)主從式通信系統(tǒng)。系統(tǒng)工作時(shí),單片機(jī)對(duì)串口和DS18B20初始化,在讀取溫度的同時(shí)等待中斷。PC機(jī)通過調(diào)用Matlab設(shè)備控制工具箱中的serial類及相關(guān)函數(shù)來創(chuàng)建串口設(shè)備對(duì)象,并以讀寫文件的方式實(shí)現(xiàn)對(duì)PC機(jī)串行口的訪問,PC機(jī)通過Matlab向串行口發(fā)送特殊指令從而觸發(fā)單片機(jī)中斷系統(tǒng),單片機(jī)調(diào)用中斷服務(wù)例程,讀取即使溫度并將采集的數(shù)據(jù)通過串行口回送給PC機(jī)。此時(shí),Matlab通過查詢的方式,實(shí)時(shí)接收單片機(jī)發(fā)送的數(shù)據(jù),并完成對(duì)數(shù)據(jù)的分析處理及圖形顯示。
3 下位機(jī)部分
下位機(jī)部分由AT89S51單片機(jī)和DS18B20溫度傳感器構(gòu)成,主要負(fù)責(zé)溫度數(shù)據(jù)的采集工作,并通過串行通信實(shí)時(shí)地將數(shù)據(jù)傳送到上位機(jī)進(jìn)行處理,PC機(jī)與MUC串口通信技術(shù)相對(duì)而言已經(jīng)比較成熟。
3.1串行通信協(xié)議
串口通信協(xié)議SPCP(Serial Port Communication Protocol)設(shè)計(jì)思想是基于幀傳輸方式,在本實(shí)驗(yàn)中,設(shè)定字符格式為1個(gè)起始位,8個(gè)數(shù)據(jù)位和一個(gè)停止位,無奇偶校驗(yàn),中間8位即為有效數(shù)據(jù),波特率設(shè)置為9600,為保證數(shù)據(jù)可靠傳輸,在傳送數(shù)據(jù)前通過握手建立連接,軟件握手協(xié)議規(guī)定如下:
上位機(jī)發(fā)送握手信號(hào)0xff給下位機(jī),下位機(jī)如果接受到上位機(jī)的信號(hào)為握手信號(hào),則回送數(shù)據(jù)包給上位機(jī),其中第一個(gè)數(shù)據(jù)為握手信號(hào),以二個(gè)數(shù)據(jù)為溫度傳感器采集到的溫度數(shù)據(jù),此時(shí),上位機(jī)如果接受到的第一個(gè)數(shù)據(jù)不是握手信號(hào),則丟棄該數(shù)據(jù)包,若是,則表示握手成功,直接存儲(chǔ)第二個(gè)數(shù)據(jù)。
3.2溫度數(shù)據(jù)采集(DS18B20)
本系統(tǒng)中采用DALLAS生產(chǎn)的“一線總線”可編程數(shù)字化溫度傳感器DS18B20,與微處理器連接時(shí)僅需要一條口線即可實(shí)現(xiàn)微處理器與DS18B20的雙向通訊,在使用中不需要任何外圍元件,設(shè)計(jì)可用數(shù)據(jù)線供電,簡(jiǎn)化系統(tǒng)的硬件,同時(shí)支持多點(diǎn)組網(wǎng)功能,多個(gè)DS18B20可以并聯(lián)在惟一的三線上,實(shí)現(xiàn)多點(diǎn)測(cè)溫,使用起來非常方便。盡管如此,DS18B20是以犧牲軟件資源換取硬件資源的,由于采用單總線數(shù)據(jù)出數(shù)方式,DS18B20的數(shù)據(jù)I/O均由同一根線完成,因此,對(duì)讀寫的操作時(shí)序要求非常嚴(yán)格。
根據(jù)DTASHEET,對(duì)DS18B20的編程主要注意以下幾個(gè)方面:
1,精確延時(shí)問題[2]:為了保證DS18B20的嚴(yán)格時(shí)序,可以將延時(shí)分為2種:10us以下的短延時(shí)和10us以上的長(zhǎng)延時(shí)。短延時(shí)可以使用C51提供的內(nèi)部函數(shù)_nop_()來實(shí)現(xiàn),一個(gè)nop()函數(shù)相當(dāng)于一條DJNZ匯編指令,約2us;長(zhǎng)延時(shí)主要有15us,90us,270us,540us等,這些延時(shí)均為15us的整數(shù)倍,一次可以使用nop()函數(shù)編寫一個(gè)延時(shí)15us的函數(shù)delay15(n)。
2,基本操作:DS18B20的一線工作協(xié)議流程是:初始化→ROM操作指令→存儲(chǔ)器操作指令→數(shù)據(jù)傳輸。對(duì)DS18B20 進(jìn)行所有的讀寫操作都是從初始化開始的,主要分為初始化操作,讀操作和寫操作。
基于以上分析,對(duì)DS18B20的編程源碼如下:
Init_DS18B20(void) //初始化函數(shù)
{DQ = 1; //DQ復(fù)位
Delay15(1); //稍做延時(shí)
DQ = 0; //單片機(jī)將DQ拉低
Delay15(32); //精確延時(shí) 大于 480us
DQ = 1; //拉高總線
Delay15(6); //延時(shí)90us
x=DQ; //讀存在脈沖
delay15(20); //延時(shí)約270us
}
Write_DS18B20(unsigned char dat)//寫一個(gè)字節(jié)
{
unsigned char i="0";//定義循環(huán)變量
for (i=0; i<8; i++)
{
DQ = 0; //復(fù)位
DQ = dat&0x01;//取數(shù)據(jù)的第i位并送出
Delay15(1);//延時(shí)
DQ = 1; //停止
dat>>=1;//右移
}
}
Read_DS18B20(void)//讀一個(gè)字節(jié)
{
unsigned char i="0";
unsigned char dat = 0;
for (i=8;i>0;i--)
{
DQ = 0; // 復(fù)位
dat>>=1;
DQ = 1; // 給脈沖信號(hào)
if(DQ)
dat|=0x80;//取位脈沖并存入dat
delay15(1);//延時(shí)
}
return(dat);
}
4 上位機(jī)部分(PC)
上位機(jī)通過串口向下位機(jī)發(fā)送命令實(shí)現(xiàn)對(duì)下位機(jī)的控制,并實(shí)時(shí)地接受下位機(jī)傳送過來的數(shù)據(jù),對(duì)其分析處理,將結(jié)果用圖形顯示并存儲(chǔ),完成人機(jī)交互過程。
Matlab并不具備直接訪問硬件的能力,但是支持面向?qū)ο蠹夹g(shù),通過調(diào)用Instrument Control Toolbox中的serial類函數(shù)來創(chuàng)建串口對(duì)象,對(duì)串口對(duì)象操作就是對(duì)串口操作,使用起非常方便。同時(shí),Matlab封裝的串口對(duì)象支持對(duì)串口的異步讀寫操作,使得計(jì)算機(jī)在讀寫串口時(shí)能同時(shí)進(jìn)行其他處理工作,因而能大大提高計(jì)算機(jī)執(zhí)行效率。Matlab用多線程技術(shù)實(shí)現(xiàn)這種異步操作,通過異步讀寫設(shè)置,計(jì)算機(jī)在執(zhí)行讀寫串口函數(shù)時(shí)能立即返回不必等待串口把數(shù)據(jù)傳輸完畢, 當(dāng)指定的數(shù)據(jù)傳輸結(jié)束時(shí)就觸發(fā)事件,執(zhí)行事件回調(diào)函數(shù),可以在事件回調(diào)函數(shù)中編程,進(jìn)行數(shù)據(jù)處理,這樣就不會(huì)造成因等待串口傳輸數(shù)據(jù)引起的時(shí)間浪費(fèi)。
4.1 Matlab下串口編程
MATLAB的Instrument Control Toolbox提供了 MATLAB與儀器儀表通信的功能 ,它支持 GPIB 通用接口總線 、VISA、TCP/ IP、UDP、RS2232等多個(gè)協(xié)議 ,具有同步和異步讀寫功能以及事件處理和回調(diào)操作功能,可讀寫和記錄二進(jìn)制和ASCII文本數(shù)據(jù)。與串口有關(guān)的主要函數(shù)如下[3]:
(1)建立串口對(duì)象函數(shù):obj=seril(’port’,’property name’,propertyvalue……),其中主要的屬性有:baudrate(波特率),databits(數(shù)據(jù)位),parity(校驗(yàn)方式),stopbits(終止位)等,可以在初始化時(shí)進(jìn)行賦值或者使用set函數(shù)。
(2)打開串口設(shè)備對(duì)象:fopen(obj)
(3) 串口讀寫操作:當(dāng)matlab通信數(shù)據(jù)采用二進(jìn)制格式時(shí),讀寫串口設(shè)備的命令為fread()和fwrite();當(dāng)通行數(shù)據(jù)采用文本(ASCII)格式時(shí),讀寫串口設(shè)備的命令為fscanf()和fprintf()。
(4)關(guān)閉并清除設(shè)備對(duì)象:
Fclose(obj);%關(guān)閉串口設(shè)備對(duì)象
Delete(obj);%刪除內(nèi)存中的串口設(shè)備對(duì)象
基于本系統(tǒng)串口通信協(xié)議,對(duì)串口對(duì)象的讀寫部分程序如下:
Obj=serial(’com1’,’baudrate’,9600,’parity’,’none’,’databits’,8,’stopbits’,1);%初始化串口
Fopen(obj);%打開串口對(duì)象
Fwrite(obj,256);%向串口發(fā)送握手信號(hào)0xff
TMP=fread(obj,3,’unit8’);%從串口讀取3字節(jié)數(shù)據(jù),后2個(gè)即是16bit溫度數(shù)據(jù)
If TMP(1)= =256 %判斷第一個(gè)字節(jié)受否是握手信號(hào)
For i = 1:3
Dat(i)=TMP(i+1);%剔除第一個(gè)握手信號(hào)字節(jié)
End
End
Fclose(obj);%關(guān)閉串口設(shè)備對(duì)象
Delete(obj);%刪除內(nèi)存中的串口設(shè)備對(duì)象
4.2 Matlab數(shù)據(jù)分析
單片機(jī)一般能處理簡(jiǎn)單的8位無符號(hào)數(shù)的四則運(yùn)算,而DS18B20可以程序設(shè)定9~12位的分辨率,精度可達(dá)±0.5℃,溫度以16bit帶符號(hào)位擴(kuò)展的二進(jìn)制補(bǔ)碼形式讀出,如果使用單片機(jī)進(jìn)行快速的實(shí)時(shí)處理則比較費(fèi)力,同時(shí)單片機(jī)還要與DS18B20及上位機(jī)通信,系統(tǒng)資源也比較緊張。因而可以將讀取的16bit溫度數(shù)據(jù)直接送往PC機(jī),由上位機(jī)來完成。Matlab強(qiáng)大的計(jì)算能力和繪圖功能給數(shù)據(jù)分析帶來了極大的方便,這不僅可以合理利用系統(tǒng)資源,也使得系統(tǒng)的通信過程更流暢。
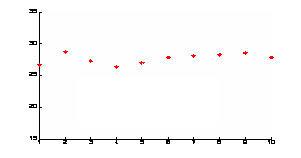
圖2所示的是用DS18B20測(cè)得的連續(xù)10個(gè)溫度數(shù)據(jù)的變化曲線圖。使用max()和min()函數(shù)可以求出溫度的極大極小值,調(diào)用polyfit()函數(shù)還可以進(jìn)行最小二乘回歸分析與曲線擬合,進(jìn)而求出溫度變化的解析式,本實(shí)驗(yàn)中使用二階擬合后,得到的溫度隨時(shí)間變化的函數(shù)解析式為:F(T)= 0.0125*T2 - 0.0145T+27.3083.
5 結(jié)語
Matlab是一款在控制領(lǐng)域應(yīng)用十分廣泛的軟件,本實(shí)驗(yàn)基于Matlab環(huán)境下PC機(jī)與單片機(jī)實(shí)時(shí)通信及數(shù)據(jù)處理的方法,設(shè)計(jì)了一個(gè)小型溫度檢測(cè)系統(tǒng),串口通信使用Matlab編程,極大的提高了開發(fā)效率,充分利用了Matlab的強(qiáng)大的數(shù)據(jù)分析能力,得到了溫度隨時(shí)間變化的函數(shù)解析式,取得了較好的效果,擴(kuò)展了Matlab的使用范圍,具有一定實(shí)用性。
本文作者創(chuàng)新觀點(diǎn):使用DS18B20傳感器簡(jiǎn)化了硬件結(jié)構(gòu),采用Matlab編程,充分利用其數(shù)據(jù)分析能力,合理利用系統(tǒng)資源,提高了開發(fā)效率,擴(kuò)展了Matlab的使用范圍。
參考文獻(xiàn):
[1] 趙云鵬.MATLAB串口通信在數(shù)據(jù)采集中的應(yīng)用.[J]微計(jì)算機(jī)信息.2006,22(1):111~112
[2] 顧振宇.劉魯源,杜振輝.DS18B20接口的C語言程序設(shè)計(jì).[J] 單片機(jī)與嵌入式系統(tǒng)應(yīng)用.2005 .12(6):22~24
[3] 向先波,徐國(guó)華. Matlab環(huán)境下PC機(jī)與單片機(jī)的串行通信及數(shù)據(jù)處理.[J] 單片機(jī)與嵌入式系統(tǒng)應(yīng)用.2004 .12:27~31
[4] 李群芳, 張士軍,黃建. 單片微型計(jì)算機(jī)與接口技術(shù)(第二版). [M].電子工業(yè)出版社.2005