
我國靶場測量、工業(yè)控制、電力系統(tǒng)測量與保護、計算、通信、氣象等測試設備均采用國際標準IRIG-B" title="IRIG-B">IRIG-B格式的時間碼(簡稱B碼)作為時間同步標準。B碼是一種串行的時間格式,分為直流碼(DC碼)和交流碼(AC碼)兩種,其格式和碼元定時在文獻[1]中有詳細描述。本文介紹一種基于FPGA" title="FPGA">FPGA并執(zhí)行IRIG-B標準的AC/DC編碼技術,與基于MCU或者DSP和數(shù)字邏輯電路實現(xiàn)的編碼方法相比,該技術可以大大降低系統(tǒng)的設計難度,降低成本,提高B碼的精確性和系統(tǒng)靈活性。
在此,組合GPS引擎和FPGA,得到B碼的編碼輸出,直接采用GPS引擎的100 pps信號觸發(fā)輸出B碼的每個碼元,利用從100 pps中恢復的1 pps信號提供B碼的時間參考點。DC編碼和AC數(shù)字調制均由純硬件邏輯通過查找表實現(xiàn),它能使每個碼元的上升沿都非常精準,都可以作為百分秒的時間參考點,而計時鏈的預進位功能則保證了絕對時間的精確,不僅可以滿足實時系統(tǒng)對時間同步,還可以實現(xiàn)多節(jié)點的數(shù)據采集嚴格同步,為分析和度量異步發(fā)生的事件提供有方的支持。
1 IRIG-B編碼格式
IRIG標準規(guī)定的B格式碼如圖1所示,每秒鐘發(fā)1次,每次100個碼元,包含1個同步參考點(Pr脈沖的上升沿)和10個索引標記。碼元寬度為10 ms,用高電平寬度為8 ms的脈沖表示索引標記,用寬度為5 ms的脈沖表示邏輯1,用寬度為2:ms的脈沖表示邏輯0。
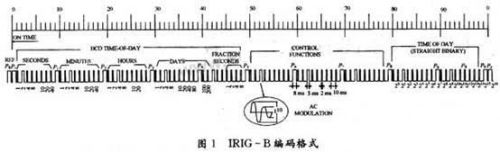
如圖1所示,交流碼的載波是1 kHz正弦信號,幅度變化峰一峰值范圍為0.5~10 V。調制比為U1/U0=1/6~1/2,即邏輯1是5個幅度為U1的1 kHz正弦信號,邏輯0是2個幅度為U1的1 kHz正弦信號,索引標記是8個幅度為U1的1 kHz正弦信號,其他時間是幅度為U0的1 kHz正弦信號。
2 系統(tǒng)方案
2.1 系統(tǒng)原理框圖
設計授時系統(tǒng)需要一個精準時基。在此利用精密授時型GPS引擎M12T作為系統(tǒng)時基,利用AlteraFPGA檢測M12T輸出的百分秒(100 pps)同步信號和經串口輸出的絕對時間信號,編碼后輸出到DC/AC接口模塊,再輸出到物理鏈路,系統(tǒng)結構圖如圖2所示。
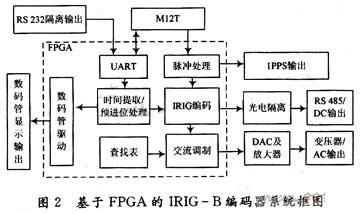
上述系統(tǒng)首先實現(xiàn)了B碼直流編碼,而后在直流碼的基礎上實現(xiàn)交流調制,以得到交流碼,同時提供恢復每秒脈沖數(shù)輸出和隔離RS 232串行口輸出且符合MOTOROLA格式的時間碼,以及數(shù)碼管的時間顯示。時間顯示部分用FPGA實現(xiàn)比較簡單,下文不再詳述。
2.2 GPS授時模塊M12T
M12接收器是MOTOROLA公司優(yōu)秀ONCORE家族中的新成員,廣泛用于各類定位、導航、授時設備中,擁有全GPS行業(yè)內最快的初次定位時間和重捕獲衛(wèi)星的時間。M12T是針對GPS授時推出的定時精度更高的增強型產品。M12T具有12個并行通道,可同時跟蹤12顆衛(wèi)星,重捕獲時間小于1.0 s。當擁有當前天歷、位置、時間和星歷數(shù)據時,首次定位時間TTFF<15 s。在位置保持狀態(tài)時,定時精度(1 pps或100 pps)小于12 ns。
2.3 FPGA和DAC
FPGA采用Altera CycloneⅡ" title="CycloneⅡ">CycloneⅡEPC2C5T144" title="EPC2C5T144">EPC2C5T144,該芯片有4 608個LE,26個M4K,兩個模擬鎖相環(huán)。DAC采用單通道、單電源、自帶基準的MAX5712。MAX5712是微型引腳,12 b解析度,片上精密輸出放大器提供滿擺幅輸出。MAX5712用兼容SPITM/QSPITM/MICROWIRETM和DSP標準接口的3線串行接口。所有輸入都兼容于CMOS邏輯,并經過施密特觸發(fā)器緩沖,允許直接接光電耦合器。MAX5712含有上電復位(POR)電路,確保上電時DAC處于零電壓輸出狀態(tài)。
3 時鐘模塊實現(xiàn)
3.1 基準時刻和索引脈沖的提取
要保證B碼每個碼元的上升沿時刻準確,需要100 pps的精確時基和pps的參考點。一般的做法是用pps作為基準,每個碼元的起點由前兩個秒脈沖的間隔等分得到。這種方法使用上一時刻來預測下一秒,每秒脈沖有抖動時會導致最后一個碼元寬度不足或超過10 ms,這將無法利用B碼來實現(xiàn)時間同步和數(shù)據等間隔同步的采集。本文直接使用M12T產生的100 pps信號作為每個碼元的起始時刻,然后再從100 pps信號中恢復出1 pps。由于B碼參考標記Pr=1 pps的上升沿,所以這種方法既保證Pr的準確性,又保證各個碼元和索引標記時刻的準確性。在有等間隔同步數(shù)據采樣要求的場合,可使用每個B碼碼元的上升沿校準本地時基,確保采樣同步和時間同步。
M12T輸出的100 pps信號(以下稱PPM12)如圖3所示,每個脈沖的上升沿時刻準確,周期10 ms,在pps的參考點,脈沖寬度為6~8 ms,其他時刻2~4 ms,脈沖寬度不是關注的重點。

B碼的每個碼元恰好與上述100 pps信號對應。首先在FPGA中構建一個模100的碼元計數(shù)器MMH和一個高電平脈沖寬度檢測器,通過下面的方法和步驟可以恢復pps。
(1)在PPM12信號的上升沿復位寬度檢測器,高電平計時,在下降沿停止并輸出Tb;
(2)在PPM12下降沿檢查Tb,當6 msb<8 ms時,令MMH=1,否則執(zhí)行下面的操作:
if MMH=99 then MMH=0
else MMH=MMH+1
(3)在PPM12信號的上升沿檢查MMH,如果MMH=0,則當前脈沖的上升沿是參考點Pr,觸發(fā)輸出8 ms高電平脈沖作為pps信號,重復步驟(1)~(3),在PPM12信號上升沿檢查MMH;如果MMH的個位為9或者MMH=0,則當前脈沖標記為索引脈沖,即輸出8 ms高電平。
3.2 絕對時間獲取
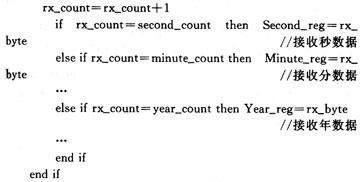
通過在FPGA上構建一個UART與M12T互連。為了簡化FPGA對M12T的配置和輸出時間的獲取,將UART分成兩部分設計,即發(fā)送模塊txmit和接收模塊rcvr。發(fā)送模塊用一個M4K設計一個512×8 FIFO,在系統(tǒng)復位后的若干個時鐘,利用一個狀態(tài)機將M12T的配置數(shù)據寫入FIFO;然后通過txmit模塊配置M12T,配置結束后,UART模塊將M12T的時間碼轉發(fā)到外部RS 232接口,同時可以轉發(fā)外部接口的配置數(shù)據到M12T。接收模塊采用寄存器模式,只接收M12T發(fā)來的絕對時間信息,這樣后面的編碼模塊可以直接使用這些時間信息。做法如下:設計一個接收計數(shù)器rx_count,每接收一個字節(jié)計數(shù)器自加,并根據rx_count決定是否保存時間碼。由于M12T每秒中發(fā)送一幀,故在檢測到pps時復位該計數(shù)器。
if pps上升沿then rx_count=0
else接收到數(shù)據and rx_count
M12T在每個1 pps的上升沿過后送出當前時間,而FPGA通過UART接收到時間時,B碼當前幀已經啟動,據此形成的B碼要等下一個pps參考點之后才可以發(fā)送,所以對接收的時間要進行預進位處理。
本文在FPGA預處理部分設計了一個RTC計時鏈,在每個1 pps的上升沿,計時鏈向上進位,編碼模塊從RTC計時鏈取絕對時間。從UART接收到新的時間后,如果該時間與計時鏈的值有差異,則將通過計時鏈的同步置數(shù)接口修正計時鏈的值。同時計時鏈負責把M12T的二進制時間轉換成壓縮的BCD碼,還要根據當前接收到的年月日,計算當天是全年中的第幾天,即IRIG-B碼中的Day字段,而且在預加1 s和轉換時間格式時,要注意閏年和月大和月小對Day字段的影響。
4 IRIG-B編碼模塊實現(xiàn)
4.1 IRIG-B DC編碼模塊
分析B碼可以發(fā)現(xiàn),秒的最低位出現(xiàn)在MMH=1處,分的最低位出現(xiàn)在MMH=10處,小時的最低位出現(xiàn)在MMH=20處,依次類推。按照圖1,容易得出時間寄存器輸出時刻和碼元計數(shù)器MMH之間的關系。由于碼元周期固定為10 ms,可以這樣實現(xiàn)編碼,定義一個模10的計數(shù)器MML和邏輯向量CMP(9 down to0)來表征一個碼元在10 ms的狀態(tài)。MML每ms加1,同時根據MML的值,選擇CMP的一位更新輸出狀態(tài),步驟如下:
(1)構建模10計數(shù)器MML,以及一個1 ms定時器;
(2)在PPM12信號的上升沿復位MML和1 ms定時器;
(3)1 ms定時器溢出時,MML加1;
(4)根據MML和CMP輸出編碼信號IRIG_B_OUT,即IRIG_B_OUT=CMP(MML);
(5)在PPM12的上升沿根據第3.1節(jié)所得碼元計數(shù)器MMH重新加載CMP
算法VHDL描述如下:
在上述VHDL編碼的實現(xiàn)中,MSCLK為1 mS計數(shù)脈沖,同步于PPM12信號的上升沿。CMP的輸出值由函數(shù)IRIG_B根據輸入參數(shù)決定,若為0,則輸出“0000000011”,對應2 ms;若為1則輸出“0000011111”,對應5 ms,在索引脈沖和參考點Pr處,CMP取值“0011111111”,對應8 ms。而最終的編碼輸出IRIG_B_OUT在每個1 ms脈沖的上升沿,根據CMP(MML)的值決定為高或為低。
4.2 IRIG-B AC編碼模塊
4.2.1 數(shù)字調制原理
按照奈奎斯特抽樣定理,只要抽樣頻率高于2倍信號的最高頻率,則整個連續(xù)信號就能完全用它的抽樣值來代表。使用抽樣值構成的序列經DAC和低通濾波后即可恢復原來的連續(xù)信號。
若對頻率為f的正弦波抽樣N次(N>2f),并在T=1/f內通過DAC等間隔輸出N次抽樣值,則低通濾波后可恢復原始正弦信號。各個采樣點值為:
Ck=Asin(ωkt)=Asin[ωk(T/N)] (1)
式中:ω=2πf;f為信號頻率。則式(1)變?yōu)椋?/p>
Ck=Asin[2πfk(T/N)]=Asin(2kπ/N) (2)
4.2.2 正弦查找表
這里給出利用查找表實現(xiàn)交流數(shù)字調制的方法。在獲得IRIG-B的直流編碼后,將該信號導入到數(shù)字調制模塊,即可獲得交流編碼。對正弦信號進行100次等間隔抽樣,對式(2)使用實際的增益和直流偏移,可得式(3)。據此獲得查找表。
Ck=Acsin(2πk/N)+A0 (3)
式中:N=100為采樣率;k=0,1,2,…,N-1;Ck對應第k次抽樣獲得的值;A0為保證輸出信號為單極性而設置的初始直流偏移;Ac為考慮調制比和DAC滿幅度碼值的系數(shù)。
由于交流信號頻率為1 kHz,周期為T=1 ms,若在1 ms內將上述抽樣值等間隔輸出到DAC,即可獲得1 kHz的調制信號。
本文使用MAX5712和單電源rail-rail運放AD8601構成濾波器。在MAX5712滿幅輸出時,C=4 095(12 bit DAC),選擇調制比為1:5。綜合考慮,在最大輸出時,不能使DAC輸出到達運放的上軌,最低輸出時,DAC輸出應高于運放的下軌,所以選取A0=C/2+200=2 248。對應邏輯0,Ac=461;對應邏輯1,Ac=1 844。根據上述原則計算出的正弦查找表如表1所示。
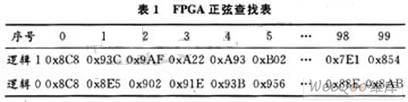
實際使用時,應根據使用DAC的解析度、運放的動態(tài)范圍以及采樣率及調制比確定上式中的參數(shù)。
4.2.3 DAC接口
實際使用時應根據DAC的不同,在FPGA中構建不同的數(shù)字接口。MAX5712需要在FPGA實現(xiàn)一個SPI接口,結構如圖4所示。接口控制部分提供一個16 b寫端口,可以接收數(shù)據。在寫使能wren為高時,接口上的數(shù)據寫入內部并行保持寄存器。在LDAC脈沖的上升沿,并行寄存器THR的內容寫入移位寄存器,同時啟動時鐘邏輯。在輸出時鐘作用下,數(shù)據從Dout輸出到DAC,在SPI_CS的后沿,DAC啟動轉換輸出與當前編碼相匹配的模擬量。
4.2.4 交流調制方法
把按照第4.2.1節(jié)方法生成的正弦查找表生成Altera mif文件,再例化一個M4K ROM,使用上述文件作為ROM的初始化文件。建立一個周期為10μs的定時器和一個地址計數(shù)器。地址計數(shù)器和定時器在B碼直流信號的變化沿復位,定時器溢出后啟動地址計數(shù)器。或者把邏輯0對應的查找表放在ROM的上半部,如果把邏輯1對應的查找表放在ROM的下半部,且輸入的直流B碼信號作為地址的高位,則此時刻對應的ROM輸出即為DAC的調制輸出,ROM查找表VHDL的代碼實現(xiàn)如下:
其中:B為來自編碼器" title="編碼器">編碼器中IRIG-B的直流編碼;AQC為地址計數(shù)器;ddata為輸出到DAC的數(shù)字調制輸出。由于查找表是按照對正弦信號做100次等間隔采樣形成的,交流載波為1 kHz。所以AQC每隔10μs自加1,順序輸出100個編碼值,在B碼的每個變化邊沿復位。
按上述方法設計的數(shù)字調制模塊,用示波器測得輸出波形如圖5所示。
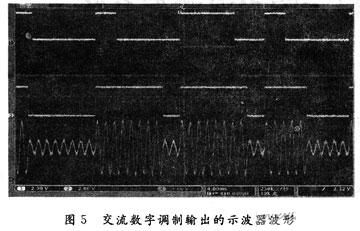
圖5中,通道1(從上至下第一個信號)為M12T輸出的100 pps信號PPMl2;通道2(從上至下第三個信號)為IRIG-B的直流編碼輸出信號;通道3(從上至下第二個脈沖)為從PPM12信號中恢復的每秒脈沖數(shù)信號;通道4(最下面的波形)為IRlG-B編碼的交流輸出波形。圖5中示波器的觸發(fā)點即為B碼參考點Pr。
4.3 IRIG-B編碼輸出
4.3.1 直流碼輸出
為了保證輸出信號的邊沿和抗干擾,將第4.1節(jié)得到的TTL電平B碼信號和秒脈沖經高速光耦隔離,輸出電路如圖6所示。
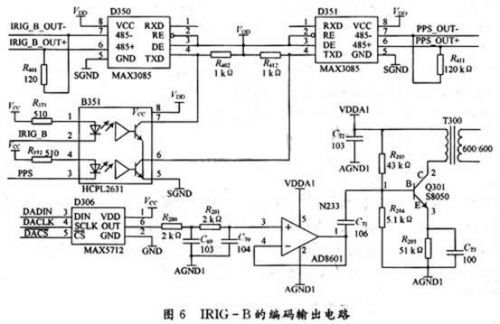
圖6中,輸入信號IRIG_B為第4.1節(jié)所述FPGA編碼模塊輸出的直流編碼信號;pps為FPGA從M12T的100 pps信號中恢復的秒脈沖信號;D350和D351實現(xiàn)了TTL/RS485的電平轉換。
4.3.2 模擬調制電壓輸出
IRIG-B編碼的交流碼輸出電路如圖6所示。將第4.2.3節(jié)所述數(shù)字調制信號通過DAC接口輸出到MAX5712上進行D/A轉換,經過AD8601濾除高次諧波后,再用電容耦合到由晶體管Q301構成的電壓放大器中,然后經600:600的隔離變壓器輸出。
5 結 語
利用FPGA和M12T授時型GPS內核構成的IRIG-B編碼模塊采用M12T的100 pps信號觸發(fā)IRIG-B編碼器,使得編碼輸出的每個碼元上升沿均與GPS模塊嚴格一致,每個碼元間隔嚴格相等,而且每個碼元的上升沿均可作為同步參考點。利用FPGA的并發(fā)處理能力,使得系統(tǒng)實時性好。本文介紹的基于查找表的B碼編碼方法和通過查找表的數(shù)字調制方法具有占用資源小,設計簡單,調制輸出高次諧波小,信號邊沿穩(wěn)定等特點。
經過軟件仿真和系統(tǒng)測試,本文實現(xiàn)的B碼編碼器中DC碼參考點Pr和M12T GPS模塊的pps參考點的時間誤差小于20 ns,與絕對時間參考點之間的誤差小于40 ns,AC碼與DC碼之間的延遲為100 ns。利用上述方法實現(xiàn)的模塊已經成功地應用在我公司的通信管理機和同步時間服務器中,現(xiàn)場運行結果穩(wěn)定、準確、可靠。