
世界范圍內(nèi)的能源短缺和環(huán)境污染已成為制約人類社會可持續(xù)發(fā)展的兩大重要因素,大力發(fā)展新的可替代能源已成為當(dāng)務(wù)之急。太陽能發(fā)電作為一種新的電能生產(chǎn)方式,以其無污染、安全、資源豐富、分布廣泛等特點(diǎn)顯示出無比廣闊的發(fā)展空間和應(yīng)用前景。隨著光伏并網(wǎng)發(fā)電設(shè)備的增加,并網(wǎng)電流諧波帶給電網(wǎng)污染的問題也得到了越來越多重視。為改善并網(wǎng)輸出電流波形,文獻(xiàn)采用了重復(fù)控制來抑制周期性干擾,但重復(fù)控制響應(yīng)速度慢,使控制系統(tǒng)穩(wěn)定性變差。文獻(xiàn)提出了使用重復(fù)控制來改善輸出波形質(zhì)量,本文在此基礎(chǔ)上提出了一種將重復(fù)控制和傳統(tǒng)PI相結(jié)合的控制方法,PI控制使系統(tǒng)有著良好的動態(tài)性能,重復(fù)控制用來抑制周期性干擾,提高跟蹤精度。
1 并網(wǎng)逆變器結(jié)構(gòu)
本文提出的單相并網(wǎng)逆變器的主體結(jié)構(gòu)如圖l所示,系統(tǒng)采用兩級結(jié)構(gòu),前級DC/DC為Boost升壓電路,后級為半橋逆變和LC濾波電路。圖l中前級Boost升壓電路是為了滿足電池板的寬電壓輸入范圍,半橋上的電容C2、C3既是Boost的輸出電容,也作為半橋的儲能電容。輸出采用LC濾波結(jié)構(gòu)來濾出高頻開關(guān)噪聲。

2 控制系統(tǒng)設(shè)計
2.1 傳統(tǒng)PI控制器設(shè)計
取圖1中輸出電感L2電流為狀態(tài)變量,則

Uinv為逆變器輸出電壓,U-Grid為電網(wǎng)電壓,L為電感值,r為電感等效內(nèi)阻。則基于傳統(tǒng)PI控制的系統(tǒng)框圖如圖2所示。
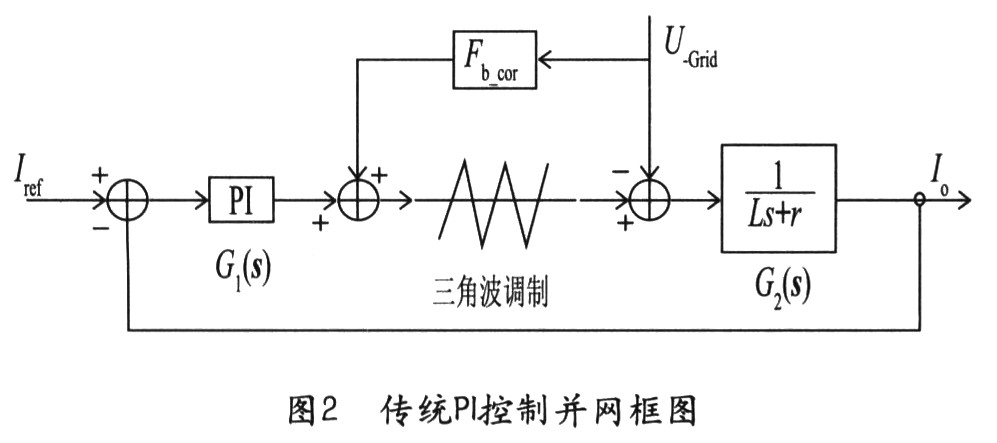
圖2中,Iref為參考正弦,U-Grid為電網(wǎng)電壓,Io為并網(wǎng)電流,F(xiàn)b_cor為前饋系數(shù)。在設(shè)計控制系統(tǒng)時為了減少或消除穩(wěn)態(tài)誤差,可以提高系統(tǒng)的型別或者開環(huán)增益,但卻影響了系統(tǒng)的穩(wěn)定性,降低了系統(tǒng)的動態(tài)性能。也可以通過限制系統(tǒng)帶寬來抑制高頻擾動,但對低頻干擾卻作用不大。而前饋控制并不改變反饋系統(tǒng)的特性,只要參數(shù)選擇得當(dāng),可以對可測量誤差進(jìn)行完全補(bǔ)償。因此本文為了抵消電網(wǎng)的影響采用了反饋和前饋相結(jié)合的復(fù)合控制方法。在高頻控制信號下,半橋電路可以等效為比例放大器,設(shè)為KPWM。則由控制若使U-Grid作用下的誤差為零,則實(shí)現(xiàn)了誤差全補(bǔ)償,由(3)式可得到全補(bǔ)償條件為
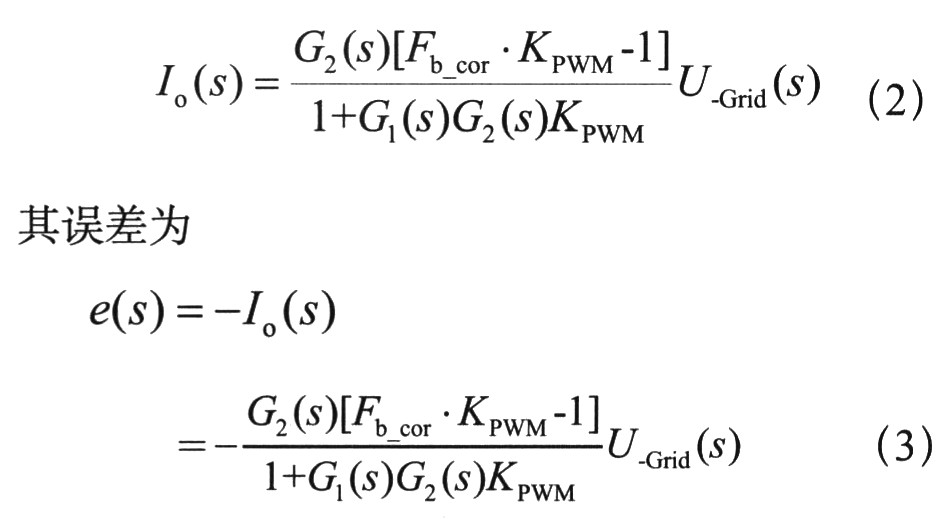
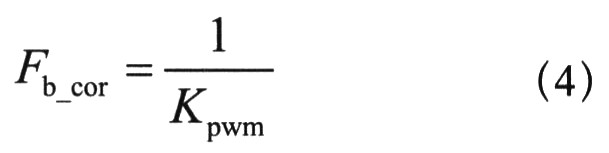
若使U-Grid作用下的誤差為零,則實(shí)現(xiàn)了誤差全補(bǔ)償,由(3)式可得到全補(bǔ)償條件為
但在實(shí)際應(yīng)用中,由于信號采樣精度及處理的延遲,不可能做到全補(bǔ)償,嚴(yán)重的時候可能給系統(tǒng)帶來新的誤差,因此必須對信號延遲進(jìn)行補(bǔ)償。本文采用了二階外推的方法對信號延遲進(jìn)行補(bǔ)償并且用simulink/matlab 7.0驗(yàn)證了上述算法,仿真結(jié)果如圖3所示。為便于顯示,將電網(wǎng)電壓衰減為峰值20V。
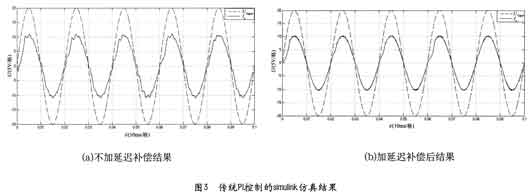
從圖3可以看出加電網(wǎng)電壓前饋的傳統(tǒng)PI控制器對可測的電網(wǎng)擾動有很好的補(bǔ)償作用,系統(tǒng)有足夠的動態(tài)響應(yīng),但這種控制方法仍然存在局限性: (1)有靜態(tài)誤差,由自控原理可以知道PI控制對正弦信號跟蹤本身就存在誤差,這個誤差可以通過增大開環(huán)增益減少但不能消除,而增大開環(huán)增益降低了系統(tǒng)的穩(wěn)定性。 (2)傳統(tǒng)PI控制對非線性因素帶來的干擾無法消除。為了實(shí)現(xiàn)無靜差跟蹤,必須改進(jìn)系統(tǒng)的控制結(jié)構(gòu)。
2.2 重復(fù)控制+PI復(fù)合控制器設(shè)計
由于逆變器系統(tǒng)中存在電流在過零點(diǎn)斷續(xù)、開關(guān)死區(qū)、驅(qū)動信號不對稱等周期擾動的影響,會導(dǎo)致逆變器輸出的并網(wǎng)電流波形畸變,給電網(wǎng)帶來諧波污染,而基于內(nèi)模原理的重復(fù)控制的基本思想是假定上一周期的基波將會在下一周期的同一時間重復(fù)出現(xiàn),這樣就可根據(jù)本周期給定信號和反饋信號的誤差確定所需的校正信號,并將上周期同一基波時間的誤差疊加到校正信號上,這樣不僅能實(shí)現(xiàn)信號的無誤差跟蹤還能消除重復(fù)出現(xiàn)的畸變。這種控制技術(shù)在消除上述周期擾動的影響有很好的靜態(tài)控制性能,也易數(shù)字實(shí)現(xiàn)。但誤差在重復(fù)控制中是在下一個周期中得到控制,這就影響了系統(tǒng)的動態(tài)性能。本文根據(jù)這兩種控制的優(yōu)缺點(diǎn),將重復(fù)控制疊加到PI控制器上,設(shè)計出了一種新的復(fù)合控制方法。
由內(nèi)模原理可以知道,在一個穩(wěn)定系統(tǒng)中包含參考信號的模型,則輸出能夠無差的跟蹤這個參考信號。在實(shí)際系統(tǒng)中,擾動是多種多樣的,若要實(shí)現(xiàn)對所有擾動進(jìn)行無差跟蹤,則要設(shè)置很多這樣的模型,使系統(tǒng)變得很復(fù)雜,不易實(shí)現(xiàn)。傳統(tǒng)的重復(fù)控制器內(nèi)模如圖4所示。
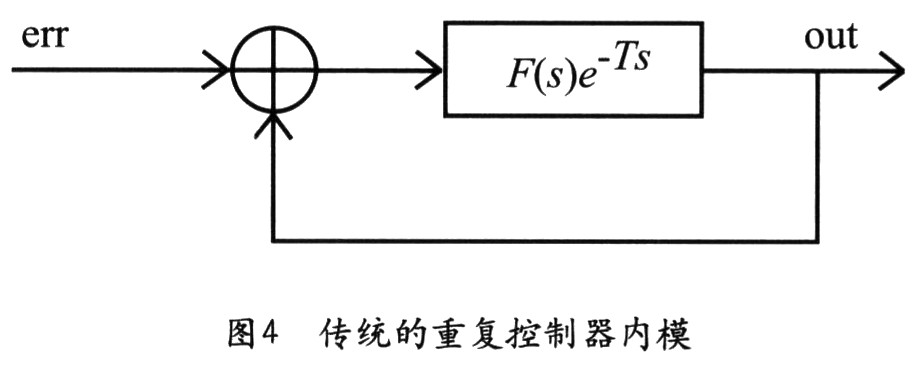
圖4中F(s)為濾波函數(shù),通常為一低通濾波器或者小于1的常數(shù),T為重復(fù)控制周期。鑒于在并網(wǎng)逆變系統(tǒng)中,死區(qū)等因素在一個基波周期重復(fù)出現(xiàn),并且為了提高重復(fù)控制器的響應(yīng)速度,對圖4所示的內(nèi)模做了修改,改進(jìn)的內(nèi)模如圖5所示。
圖5中,T為重復(fù)控制周期。將上述內(nèi)模嵌入到圖2所示的傳統(tǒng)PI控制器里得到了新的復(fù)合控制方法,如圖6所示。
基于上面的原理,本文設(shè)計了matlab仿真模型,圖7為simulink/matlab 7.0復(fù)合控制仿真結(jié)果,從圖中可以看出系統(tǒng)功率因數(shù)為1,波形也明顯得到了改善。

3 實(shí)驗(yàn)結(jié)果
為驗(yàn)證上面的算法,本文設(shè)計了一臺5kW單相并網(wǎng)逆變器,圖1為電路拓?fù)洹D8為傳統(tǒng)PI控制下的并網(wǎng)電流和電網(wǎng)電壓波形,電流在過零處有振蕩并有相移,這是由于死區(qū)效應(yīng)引起的失真和PI控制開環(huán)增益不能太大所導(dǎo)致。圖9為重復(fù)和PI復(fù)合控制下的并網(wǎng)電流和電網(wǎng)電壓波形,電流失真明顯減小,功率因數(shù)也得到了提高。

4 結(jié)論
本文提出了重復(fù)控制和PI控制相結(jié)合的復(fù)合控制策略,并通過實(shí)驗(yàn)驗(yàn)證了其有效性。重復(fù)控制用來抑制死區(qū)等周期性干擾,并提高系統(tǒng)的穩(wěn)態(tài)性能,傳統(tǒng)PI控制用來提高系統(tǒng)的動態(tài)性能。兩者相互補(bǔ)充,使輸出并網(wǎng)電流具有低的諧波失真和高的功率因數(shù),為光伏并網(wǎng)發(fā)電系統(tǒng)提出了一種高性價比的控制策略。