
摘? 要: 研究并設(shè)計(jì)了應(yīng)用于母盤" title="母盤">母盤刻錄機(jī)的高精密工作臺伺服驅(qū)動(dòng)環(huán)節(jié)。在基于DSP數(shù)字閉環(huán)控制器的基礎(chǔ)上,通過理論建模 程序仿真和實(shí)驗(yàn)驗(yàn)證,對驅(qū)動(dòng)環(huán)節(jié)進(jìn)行了優(yōu)化設(shè)計(jì)。在驅(qū)動(dòng)環(huán)節(jié)中采用了模擬速度環(huán) PI校正環(huán)節(jié)和線性功放,使工作臺在低速下有較快的響應(yīng)和較小的穩(wěn)態(tài)誤差。實(shí)驗(yàn)結(jié)果表明,使用驅(qū)動(dòng)環(huán)節(jié)后的伺服控制系統(tǒng)有利于提高母盤的刻錄精度。
關(guān)鍵詞: 母盤刻錄? 精密工作臺? 驅(qū)動(dòng)環(huán)節(jié)? 速度環(huán)? PI校正
?
隨著社會的發(fā)展,信息的存儲量越來越大,光盤信息存儲技術(shù)也在不斷飛速發(fā)展,因而對母盤制造精度提出了更高的要求。
目前,光盤國家工程研究中心利用高速數(shù)字信號處理器(DSP),采用數(shù)字閉環(huán)控制原理[1]和傳統(tǒng)伺服電機(jī)驅(qū)動(dòng)方式,實(shí)現(xiàn)了高精度工作臺的連續(xù)大行程運(yùn)動(dòng)。其微位移定位精度為±50nm,宏位移定位精度優(yōu)于±150nm,可以滿足母盤刻錄直線進(jìn)給工作臺的連續(xù)變速和±50nm控制精度[2~3]的要求。
在此基礎(chǔ)上,本文研究并設(shè)計(jì)了工作臺的模擬驅(qū)動(dòng)環(huán)節(jié),以提高控制系統(tǒng)低速響應(yīng)的穩(wěn)定性和快速性。
1 系統(tǒng)總體結(jié)構(gòu)
母盤刻錄系統(tǒng)直線進(jìn)給工作臺的底座固定在隔振大理石臺上,底座上安裝了帶高精度滾珠的V型槽作為運(yùn)動(dòng)導(dǎo)軌。工作臺經(jīng)蝸輪蝸桿和小螺距精密絲杠兩級減速,通過直流伺服電機(jī)進(jìn)行驅(qū)動(dòng)。
母盤刻錄系統(tǒng)采用恒線速刻錄方式,聚焦光斑相對于母盤的理想運(yùn)動(dòng)是沿著以母盤圓心為中心的等線距阿基米德螺旋線以恒定線速度由內(nèi)向外運(yùn)動(dòng)的,該運(yùn)動(dòng)由母盤的高速轉(zhuǎn)動(dòng)和刻錄光學(xué)頭的徑向直線進(jìn)給合成得到。
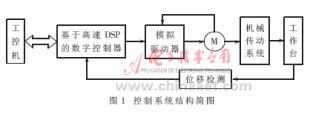
該精密工作臺用于母盤刻錄的正常工作速度約為30μm/s,采用上述大減速比的機(jī)械傳動(dòng)系統(tǒng)不可避免地存在傳動(dòng)誤差。因此要實(shí)現(xiàn)精密定位,必須采用全閉環(huán)控制系統(tǒng),直接檢測工作臺位置并針對位置誤差進(jìn)行伺服控制。工作臺的控制系統(tǒng)總體結(jié)構(gòu)如圖1所示。
?
2 模擬驅(qū)動(dòng)環(huán)節(jié)的建模
2.1?直流電機(jī)模型
工作臺驅(qū)動(dòng)電機(jī)采用上海電機(jī)廠生產(chǎn)的直流力矩測速電機(jī)組45L-CZ001。
若忽略電樞電感和粘性阻尼系數(shù),則以電樞電壓Ua(s)為輸入?轉(zhuǎn)速Ω(s)為輸出的直流電機(jī)的傳遞函數(shù)" title="傳遞函數(shù)">傳遞函數(shù)為:
 ?????
?????
其中, Ke為電動(dòng)機(jī)反電動(dòng)勢系數(shù),其單位為V·s;Tm為電機(jī)的機(jī)械時(shí)間常數(shù)" title="時(shí)間常數(shù)">時(shí)間常數(shù);Te為電機(jī)的電氣時(shí)間常數(shù),其值很小可忽略,因此直流電機(jī)可以被簡化為一階系統(tǒng)[4]。
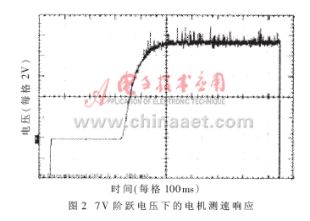
電機(jī)機(jī)械時(shí)間常數(shù)的測定可以通過給電機(jī)加一個(gè)7V階躍" title="階躍">階躍電壓,然后用示波器測定響應(yīng)到達(dá)穩(wěn)定值0.632時(shí)所用的時(shí)間而近似得到,如圖2所示。得機(jī)械時(shí)間常數(shù)Tm=0.06s。
開環(huán)情況下,輸入電壓經(jīng)過線性功放后直接驅(qū)動(dòng)電機(jī),用轉(zhuǎn)速表HT-331測量對應(yīng)轉(zhuǎn)速,可以得到放大倍數(shù)。測得的數(shù)據(jù)列于表1中。
?
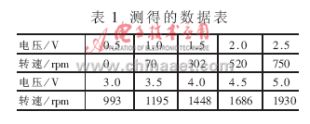
數(shù)據(jù)經(jīng)過直線擬合后,得到放大倍數(shù)為463.25。
電氣時(shí)間常數(shù)很小,近似取Te=0.0012,可以得到經(jīng)過功放后的直流電機(jī)模型的傳遞函數(shù)為:

2.2 驅(qū)動(dòng)電路設(shè)計(jì)
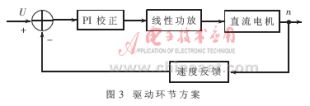
為了提高系統(tǒng)在低速時(shí)響應(yīng)的快速性?穩(wěn)定性和帶負(fù)載能力,要對模擬驅(qū)動(dòng)電路進(jìn)行設(shè)計(jì),由測速機(jī)引入速度負(fù)反饋,電壓差值經(jīng)過PI校正環(huán)節(jié)和線性功率放大器放大后驅(qū)動(dòng)直流伺服電機(jī)運(yùn)動(dòng)。驅(qū)動(dòng)環(huán)節(jié)方案如圖3所示。
?
PI校正環(huán)節(jié)的設(shè)計(jì)對驅(qū)動(dòng)環(huán)節(jié)的性能有重要的影響,原理圖如圖4所示。其傳遞函數(shù)為:
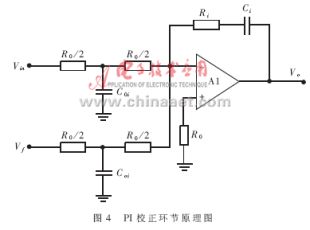
其中,Ki=Ri/R0為校正器的比例放大系數(shù),τi=RiCi為校正器時(shí)間常數(shù),T0i=R0C0i/4為濾波時(shí)間常數(shù),一般取值較小,用于過濾高頻噪聲干擾。為了能夠?qū)⑺俣拳h(huán)設(shè)計(jì)成典型二階環(huán)節(jié),必須保證校正器零點(diǎn)的選擇能夠消掉調(diào)節(jié)時(shí)間大的時(shí)間常數(shù),即τi=Tm。若取濾波時(shí)間常數(shù)T0i=0.25ms,R0=100kΩ,則濾波電容C0i=0.01μF。取比例放大倍數(shù)為Ki=3,得Ri=KiR0=300kΩ,于是得Ci=0.2μF。
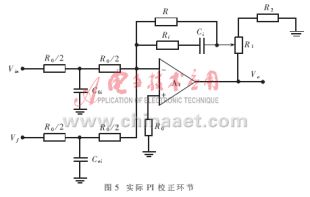
為了保證PI校正環(huán)節(jié)在達(dá)到穩(wěn)態(tài)時(shí)放大器不致因開環(huán)而飽和,故在PI反饋線路上并聯(lián)一個(gè)反饋大電阻R1=1MΩ。此外,為了便于調(diào)節(jié),將PI校正器增加比例系數(shù)功能,但又為防止調(diào)整時(shí)對時(shí)間常數(shù)產(chǎn)生太大影響,于是要保證Ri>>R1,取R1=10kΩ,R2=1kΩ。實(shí)際采用的電路圖如圖5所示[5]。
?
下面測定測速反饋系數(shù),數(shù)據(jù)列于表2中。
?

將數(shù)據(jù)進(jìn)行直線擬合后得到反饋系數(shù)為:
??? H(s)=0.022
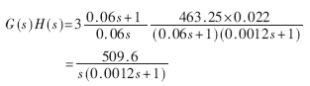
忽略PI校正環(huán)節(jié)濾波時(shí)間常數(shù)T0i,最終可得到速度。環(huán)開環(huán)傳遞函數(shù)為:
3 驅(qū)動(dòng)電路仿真
選用的仿真環(huán)境是Matlab6.1及其下的Simulink工具箱。
3.1?速度環(huán)開環(huán)伯德圖
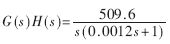
速度環(huán)開環(huán)傳遞函數(shù)為:
用Matlab6.1繪制伯德圖,得到圖6。
?
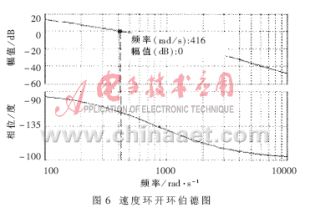
剪切頻率: 416Hz 相角裕量:65度
系統(tǒng)有充分的相角裕量,可知系統(tǒng)穩(wěn)定。
3.2 速度環(huán)閉環(huán)階躍響應(yīng)仿真
用Matlab6.1下的Simulink工具箱搭建速度環(huán)閉環(huán)系統(tǒng)結(jié)構(gòu)圖,如圖7所示。加以0.2V的階躍信號,取反饋系數(shù)為0.022,仿真結(jié)果如圖8所示。
?

?
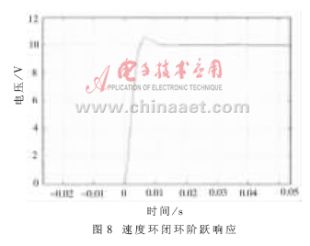
從響應(yīng)曲線圖上可以看出,系統(tǒng)階躍響應(yīng)的上升時(shí)間為5ms,超調(diào)量為6%,轉(zhuǎn)速穩(wěn)定值為10rpm/s,系統(tǒng)性能良好。
4 實(shí)驗(yàn)數(shù)據(jù)處理與分析
經(jīng)過理論建模和程序仿真后,設(shè)計(jì)及調(diào)試用于精密伺服工作臺的模擬驅(qū)動(dòng)環(huán)節(jié),并進(jìn)行時(shí)域分析,比較實(shí)驗(yàn)結(jié)果。
4.1 不加模擬驅(qū)動(dòng)環(huán)節(jié)
首先不加模擬驅(qū)動(dòng)環(huán)節(jié),用DSP數(shù)字控制器" title="數(shù)字控制器">數(shù)字控制器的輸出信號(經(jīng)過線性功放)直接驅(qū)動(dòng)直流力矩電機(jī)運(yùn)動(dòng)。
4.1.1 DSP開環(huán)實(shí)驗(yàn)
在DSP數(shù)字控制器開環(huán)情況下加一個(gè)輸入電壓,測試所加電壓和工作臺速度的關(guān)系,工作臺速度由采集的直線位置光柵信號經(jīng)過VC++程序處理得到。所得數(shù)據(jù)列于表3中。
?
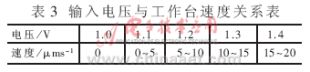
由表中數(shù)據(jù)可見,DSP開環(huán)的速度穩(wěn)定性差,死區(qū)電壓為1.1V,系統(tǒng)靈敏度有待提高。
4.1.2 DSP閉環(huán)實(shí)驗(yàn)
DSP數(shù)字控制器閉環(huán)時(shí),指定工作臺以20μm/s的低速運(yùn)動(dòng)。圖9中,(a)為速度響應(yīng)曲線,(b)為位移響應(yīng)曲線,(c)為位移響應(yīng)曲線局部放大圖。
?

由圖9(a)和圖9(c)可以看出系統(tǒng)有近40ms的延遲時(shí)間,其中20ms為死區(qū)時(shí)間(系統(tǒng)無響應(yīng))。系統(tǒng)產(chǎn)生延遲主要有下面兩個(gè)原因:機(jī)械傳動(dòng)系統(tǒng)存在齒隙?回程等誤差;電機(jī)機(jī)械響應(yīng)存在延遲。
由圖9可以得到不加模擬驅(qū)動(dòng)環(huán)節(jié)時(shí)系統(tǒng)階躍輸入的時(shí)域響應(yīng)指標(biāo)如下:
延遲時(shí)間:40ms???????????? 上升時(shí)間:60ms
峰值時(shí)間:100ms????????? ? 超調(diào)量:25%
穩(wěn)態(tài)誤差:15%
可見,在不加模擬驅(qū)動(dòng)環(huán)節(jié)?直接用DSP閉環(huán)控制時(shí),精密工作臺的低速響應(yīng)已經(jīng)達(dá)到了一定的快速性和穩(wěn)定性。但是用于母盤刻錄時(shí),工作臺的穩(wěn)定性則需進(jìn)一步提高。
4.2?加模擬驅(qū)動(dòng)環(huán)節(jié)
在工作臺控制系統(tǒng)中采用帶有速度環(huán)?PI校正和線性功放的模擬驅(qū)動(dòng)環(huán)節(jié)驅(qū)動(dòng)電機(jī)運(yùn)動(dòng),進(jìn)行DSP數(shù)字控制器開環(huán)及閉環(huán)實(shí)驗(yàn)。
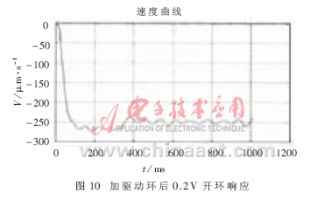
4.2.1 DSP開環(huán)實(shí)驗(yàn)
使用模擬驅(qū)動(dòng)環(huán)節(jié)后,實(shí)驗(yàn)測得在DSP數(shù)字控制器開環(huán)時(shí),系統(tǒng)在0.2V電壓下已經(jīng)能夠產(chǎn)生較連續(xù)的響應(yīng)了,如圖10所示。可見系統(tǒng)靈敏性有所提高。
?
4.2.2 DSP閉環(huán)實(shí)驗(yàn)
加上該模擬驅(qū)動(dòng)環(huán)節(jié)后,對系統(tǒng)進(jìn)行DSP數(shù)字控制器的閉環(huán)實(shí)驗(yàn),仍然指定工作臺以20μm/s的低速運(yùn)動(dòng)。圖11中,(a)為速度響應(yīng)曲線,(b)為位移響應(yīng)曲線,(c)為位移響應(yīng)曲線局部放大圖。
?

由圖11(a)和圖11(c)可知,系統(tǒng)的延遲時(shí)間為20ms,其中10ms為死區(qū)時(shí)間。可見加上該模擬驅(qū)動(dòng)環(huán)節(jié)后系統(tǒng)的延時(shí)減少。
由圖11可以得到加模擬驅(qū)動(dòng)環(huán)節(jié)后的系統(tǒng)階躍輸入的時(shí)域響應(yīng)指標(biāo)如下:
延遲時(shí)間:20ms???????????? 上升時(shí)間:30ms
峰值時(shí)間:60ms???????????? 超調(diào)量:7.5%
穩(wěn)態(tài)誤差:7.5%
比較實(shí)驗(yàn)結(jié)果可以看出,加模擬驅(qū)動(dòng)環(huán)節(jié)后,精密工作臺系統(tǒng)的靈敏度大幅提高,且系統(tǒng)的低速穩(wěn)定性能提高一倍。但速度曲線仍存在波動(dòng),這主要有兩方面的原因:一是機(jī)械傳動(dòng)系統(tǒng)精度影響了工作臺的穩(wěn)速精度;二是工作臺位移檢測光柵分辨率有限,直接影響了采樣點(diǎn)之間位移增量的測量精度。
母盤刻錄機(jī)的進(jìn)給工作臺除要求有高的定位精度外,還要求能連續(xù)運(yùn)動(dòng),并且在低速(約30μm/s)下具有良好的速度穩(wěn)定性,穩(wěn)態(tài)誤差小于10%。速度越低,伺服工作臺運(yùn)動(dòng)的條件就越惡劣,對伺服控制系統(tǒng)的要求就越高,保證速度穩(wěn)定性的難度就越大。由實(shí)驗(yàn)結(jié)果和分析可以看出,在DSP數(shù)字控制系統(tǒng)中采用模擬驅(qū)動(dòng)環(huán)節(jié)后,工作臺的低速響應(yīng)性能有明顯的提高,不但提高了響應(yīng)的快速性,而且穩(wěn)態(tài)誤差也減小,速度變化范圍在7.5%之內(nèi)。伺服驅(qū)動(dòng)性能的提高有利于保證母盤刻錄的精度。
?
參考文獻(xiàn)
1 Gutt H. J.,Scholl F. D., Blattner J. High Precision?Servo Drives with DSP-based Torque Ripple Reduction.
? IEEE Africon. 1996,(2)4: 24~27 .
2 徐端頤.光盤存儲系統(tǒng)設(shè)計(jì)原理.北京:北京國防工業(yè)出版社, 2000
3 干福熹.數(shù)字光盤存儲技術(shù).北京:北京科學(xué)出版社,1998
4 胡壽松.自動(dòng)控制原理.北京:北京科學(xué)出版社,2001
5 董景新.控制工程基礎(chǔ).北京:清華大學(xué)出版社,1996