
1.引言
由近年來,隨著電子技術(shù)的發(fā)展,各種辦公自動(dòng)化設(shè)備,家用電器,計(jì)算機(jī)被大量使用。這些設(shè)備的內(nèi)部都需要一個(gè)將市電轉(zhuǎn)化為直流的電源部分。在這個(gè)轉(zhuǎn)換過程中,由于一些非線形元件的存在,導(dǎo)致輸入電流電壓雖然是正弦的,但輸入的交流電流卻嚴(yán)重畸變,包含大量諧波。而諧波的存在,不但降低了輸入電路的功率因數(shù),而且對公共電力系統(tǒng)產(chǎn)生污染,造成嚴(yán)重的電路故障。正因?yàn)槿绱嗽S多國家制定了相應(yīng)的技術(shù)標(biāo)準(zhǔn),用以限制諧波電流的含量。例如IEC 555-2﹑IEC 61000-3-2﹑EN 60555-2﹑GB/T 4549-1993等標(biāo)準(zhǔn),規(guī)定了允許用電電氣設(shè)備產(chǎn)生的最大諧波電流。由此可見,由此可見消除諧波電流和提高功率因數(shù)有非常重要的意義。在整流輸出電路后采用有源功率因數(shù)校正技術(shù)能夠有效地解決上述問題,實(shí)現(xiàn)各種電源裝置網(wǎng)側(cè)電流正弦化,使功率因數(shù)接近1,并且極大地減少諧波電流,消除無功損耗。然而在有源功率因數(shù)校正中控制方式又分為模擬和數(shù)字控制方式,控制方式的選取對減少電流諧波和提高功率因數(shù)有重大影響。因此本文重點(diǎn)介紹模擬控制器和數(shù)字控制器在Boost單相功率因數(shù)校正變換電路中的應(yīng)用,并論證了數(shù)字控制方式將逐步取代模擬控制方式,在不遠(yuǎn)的將來成為PFC中的主流控制方式。
2.有源PFC的工作模式和控制方式
根據(jù)電感電流是否連續(xù),PFC電路的工作模式可分為不連續(xù)導(dǎo)電模式(DCM)和連續(xù)導(dǎo)電模式(CCM)。DCM模式的PFC電路一般用于電壓控制型而且功率小于200W,CCM模式的控制方法比較復(fù)雜,一般用于電流控制型并且功率大于200W以上的PFC電路。有源PFC電路的電流控制型控制方式分為峰值電流控制,滯環(huán)電流控制和平均電流控制,本論文中選用的控制方法是平均電流控制法。
3.功率因數(shù)校正的必要性
一般開關(guān)電源的輸入整流電路部分為圖1所示:
圖1 整流電路圖
例如在離線式開關(guān)電源的輸入端,AC電源經(jīng)全波整流后,一般接一個(gè)大電容器,以得到波形較為平直的直流電壓。整流器-電容濾波電路是一種非線形元件和儲能元件的組合。因此輸入交流了電壓雖然是正弦的,但輸入交流電流波形卻嚴(yán)重畸變,呈脈沖狀,其結(jié)果可以由如圖1所示整流電路在Matlab的Simulink中仿真結(jié)果得到驗(yàn)證。從圖2可以看出,輸入電流
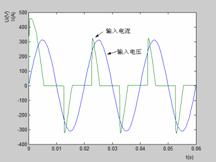
圖2 整流電路輸入點(diǎn)壓電流仿真圖
發(fā)生了嚴(yán)重畸變。因此,大量應(yīng)用整流電路,要求電網(wǎng)供給嚴(yán)重畸變的非正弦電流,造成的嚴(yán)重后果是:諧波電流對電網(wǎng)有危害作用,輸入端功率因數(shù)下降。為了消除電流諧波和提高功率因數(shù),必須在電路整流后加入功率因數(shù)校正電路。應(yīng)用最廣泛的是單相Boost有源功率因數(shù)校正變換電路,如圖3所示。
圖3 單相Boost功率因數(shù)校正原理圖
在上述單相Boost功率因數(shù)校正電路中,最關(guān)鍵的部分是控制系統(tǒng)的設(shè)計(jì),控制方式的選取又是控制系統(tǒng)設(shè)計(jì)的核心。控制電路可以一般選用模擬控制器和數(shù)字控制器,下面將詳細(xì)的分析模擬控制器和數(shù)字控制器在單相Boost功率因數(shù)校正電路中應(yīng)用。
4.模擬控制PFC的實(shí)現(xiàn)
4.1模擬控制的PFC模型[1]
單相Boost功率因數(shù)校正電路中的模擬控制方法應(yīng)用比較廣泛,目前已經(jīng)有現(xiàn)成的商業(yè)化集成電路芯片,如TI/Unitrode公司的 UC3854,F(xiàn)airchild公司的ML4812以及Stmicroelectronics公司的L6561等,圖4是基于UC3854的模擬控制電路結(jié)構(gòu)方框圖。圖中Boost變換器工作在連續(xù)導(dǎo)電模式下,其電感電流就是輸入電流。電感電流被采樣并被控制,其幅值與輸入電壓同相位的正弦參考信號成正比,從而達(dá)到功率因數(shù)校正的目的;乘法器方式PFC電路還可以根據(jù)輸出電壓反饋信號,利用一個(gè)乘法器電路來控制正弦參考電流信號,從而獲得可調(diào)整的輸出電壓;同時(shí),也具有輸出電壓的平均值。實(shí)際上模擬控制器可以概括為兩個(gè)控制環(huán),內(nèi)環(huán)電流環(huán),作用是使輸入電流跟蹤輸入電壓,外環(huán)電壓環(huán),作用是穩(wěn)定輸出電壓。
圖4 Boost PFC模擬控制原理圖
4.2模擬控制PFC的設(shè)計(jì)
基于UC3854的模擬PFC如圖4所示:電路的顯著特點(diǎn)是引入儲能電感L和乘法器M。儲能電感L與高頻開關(guān)S的配合起到電流分配器的作用,當(dāng)開關(guān)管S導(dǎo)通時(shí),二極管D截止,電流流過電感L;當(dāng)開關(guān)管S斷開時(shí),二極管D導(dǎo)通,L將儲存的能量為負(fù)載供電。在二極管D截止期間,負(fù)載電流靠輸出電容Co來維持。如果按照交流線電壓的正弦波形變化規(guī)律來控制開關(guān)管S的導(dǎo)通和截止,有可能使通過儲能電感L的電流波形正弦化。這里電流乘法器M起著很關(guān)鍵的作用,乘法器M實(shí)際上是一個(gè)工作頻率正比于正弦線電壓頻率的電流源,該電流源充當(dāng)PWM比較器的參考信號iref 與電路回路電流信號if進(jìn)行比較,并將其誤差轉(zhuǎn)換成驅(qū)動(dòng)高頻開關(guān)管S的一系列脈沖控制信號。由于參考信號iref完全跟蹤交流市電輸入正弦波電壓的全波整流輸出的正弦信號,這一系列控制脈沖信號的占空比也是嚴(yán)格按正弦分布。控制過程是一個(gè)深度電流負(fù)反饋過程,從而實(shí)現(xiàn)交流市電輸入電流波形包括的正弦化。另外,電流乘法器M的輸出電流iref還反比于Boost PFC電路的輸出電壓Vo或正比于輸出電壓比較器的輸出電壓Ve,這意味著Vo也在左右PWM比較器的電流參考信號iref,使Boost PFC電路的輸出電壓Vo穩(wěn)定不變。因此乘法器M起雙重作用,強(qiáng)制輸入電流信號的正弦化和穩(wěn)定輸出電壓Vo。據(jù)圖4和UC3854的功能可在Matlab 的Simulink中設(shè)計(jì)模擬仿真模型圖[2]。
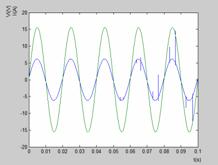
圖5 Boost PFC模擬控制器輸入電壓電流仿真
圖6 數(shù)字控制的PFC原理圖
4.3仿真結(jié)果及分析
仿真參數(shù):輸入電壓交流VAC=220V;升壓電感L=1mh;輸出電容Co=1410;fk=50Khz;Ro=50 。圖5所示的是模擬PFC仿真結(jié)果:從圖中我們可以看出,模擬控制PFC使輸入電流較好地跟隨了輸入電壓,并且降低了諧波電流,達(dá)到了功率因數(shù)校正的目的。由此可知單相Boost PFC電路的模擬控制方法優(yōu)點(diǎn)是簡單直接,設(shè)計(jì)方便;缺點(diǎn)是控制電路所用的元器件比較多,調(diào)試麻煩,電路維護(hù)成本高和不易升級;另外電路適應(yīng)性較差,容易受到噪聲干擾和環(huán)境的影響。
5.數(shù)字控制PFC的實(shí)現(xiàn)
5.1數(shù)字控制的PFC模型
如圖6所示是基于 DSP(TMS320LF2407)的數(shù)字控制PFC模型,同圖4模擬Boost PFC的相比較,原理是一樣的,區(qū)別就是用兩個(gè)數(shù)字的比例積分控制器(PI)Ki﹑Ku代替了原來的兩個(gè)誤差放大器。另外,在電壓PI的輸出端加了一個(gè)陷波濾波器,濾波頻率為100HZ。與模擬濾波器相比,數(shù)字濾波器可以很好的減少100HZ的諧波成分,同時(shí)引入相位影響要小很多。這樣,就可以提高電壓回路的帶寬,繼而提高電路的反映速度。在圖6中,三個(gè)采樣信號被采樣,分別是輸出電壓Vi,輸入電流Ii和輸出電壓Vo。其中值得注意的一點(diǎn)是,我們可以編程實(shí)現(xiàn)總是在開關(guān)閉合的中間時(shí)間對is采樣,從而不需要另加低通濾波器就可以is的平均值。
5.2 數(shù)字控制PFC設(shè)計(jì)[1]。
接下來,我們分別建立PI控制器和陷波器的數(shù)字模型。PI控制算法的模擬表達(dá)式為:
 (1)
(1)
對(1)進(jìn)行離散化處理得到:
 (2)
(2)
式中: 為比例系數(shù); 為積分系數(shù);
T為采樣周期; 為積分時(shí)間常數(shù)。
PI系數(shù)的確定通常通過實(shí)驗(yàn)確定,或通過湊試,或者通過經(jīng)驗(yàn)公司來確定。
陷波濾波器的設(shè)計(jì)可根據(jù)公式(3)確定
 (3)
(3)
式中: 是濾波頻率的角速度;Q值按不同的要求確定。離散化可以由Matlab的sysd=c2d(sys,Ts)方程方便的實(shí)現(xiàn)。
5.3 DSP控制的實(shí)現(xiàn)[3]
這里采用TI公司的16位TMS320LF2407來實(shí)施控制方案。對電流回路和電壓回路分別采用20kHz和10kHz的控制頻率。兩個(gè)中斷程序INT2和INT3用來完成PFC的數(shù)字控制,其中斷程序 INT2負(fù)責(zé)3個(gè)輸入的采樣以及電流回路的PI控制,中斷程序INT3負(fù)責(zé)電壓回路的PI控制以及陷波濾波。圖10是主程序控制流程圖,其中INT2的中斷優(yōu)先級高于INT3,所以當(dāng)INT3沒有完成而INT2中斷發(fā)生時(shí),INT3將懸掛,直到INT2中斷程序運(yùn)行結(jié)束后才能繼續(xù)運(yùn)行。
圖7 主程序流程圖
5.4 仿真結(jié)果及分析
根據(jù)圖6和TMS320LF2407的特性在Matlab的Simulink中進(jìn)行仿真得到仿真圖如圖8所示,由圖可知,DSP數(shù)字控制PFC使輸入電流很好地跟隨輸入電壓,而且完全消除了高次諧波電流,實(shí)現(xiàn)了功率因數(shù)校正的目的。從這里可以看出單相Boost PFC電路的數(shù)字控制的優(yōu)點(diǎn)是元器件少,便于系統(tǒng)調(diào)試和維護(hù);另外DSP內(nèi)部的數(shù)字處理不會受到電路噪聲的影響,避免模擬信號傳遞的畸變﹑失真,因此控制可靠;還有因?yàn)檐浖邪瑥?fù)雜的控制系統(tǒng)因而顯著的減少了電路的尺寸。缺點(diǎn)是在整流器件方面采用數(shù)字控制研究開展的還不多,成熟的控制算法難以獲得,此外數(shù)字控制芯片如DSP的價(jià)格相對較高等等。
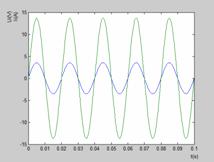
圖8 Boost PFC數(shù)字控制器輸入電壓電流仿真圖
6.結(jié)論
從上面的分析可以知道,模擬控制器和數(shù)字控制器在單相Boost功率因數(shù)校正電路中都可以提高功率因數(shù),消除高次諧波電流和降低總諧波畸變因數(shù)(THD),完全的實(shí)現(xiàn)了功率因數(shù)校正的目的,但是數(shù)字控制器在相比于模擬控制器,在功率因數(shù)校正的效果上更優(yōu),且能減少元器件數(shù)量和顯著的降低電路的體積;便于電路的維護(hù)和升級,且不易受環(huán)境的影響。雖然用于數(shù)字控制電路中的DSP價(jià)格還比較高,但是隨著時(shí)代的進(jìn)步,DSP價(jià)格的進(jìn)一步降低和控制算法的成熟,相信在不遠(yuǎn)的將來,數(shù)字控制器一定會取代模擬控制器廣泛的應(yīng)用于PFC電路中。