
摘 要: 精確的位置信息是實現(xiàn)普適計算" title="普適計算">普適計算的要求。提出了基于nRF2401無線收發(fā)模塊" title="無線收發(fā)模塊">無線收發(fā)模塊和超聲波技術(shù)的精確定位系統(tǒng)" title="定位系統(tǒng)">定位系統(tǒng)的組成框架和定位算法;并給出了基于nRF2401無線收發(fā)模塊組成傳感器網(wǎng)絡(luò)的MAC協(xié)議和超聲波收發(fā)時間差的修正方案。
關(guān)鍵詞: 超聲波定位 普適計算 無線電收發(fā)模塊 媒體接入控制
隨著計算機技術(shù)和無線電通信技術(shù)的發(fā)展,普適計算(Ubiquitous Computing)將被應用在各種領(lǐng)域,融入到人們的日常生活中,提高人們的生活質(zhì)量和水平。普適計算的一個前題條件是必須獲取普適計算對象的位置信息[1],這個位置信息依據(jù)普適計算的不同應用,可以是基于區(qū)域范圍的,也可以是基于精確坐標的。
有很多定位技術(shù)都可以對物體進行定位,但適合普適計算要求的、對多個移動物體精確定位的、電子系統(tǒng)復雜性[2]低的技術(shù)卻并不多。普適計算的應用環(huán)境一般在室內(nèi),并且要求定位精度達到厘米級,定位系統(tǒng)必須能很方便地在空間布置。基于無線收發(fā)模塊和超聲波技術(shù)的精確定位系統(tǒng)是一種可行的適合普適計算要求的定位系統(tǒng)。本系統(tǒng)的特點是電子系統(tǒng)復雜性低,容易實現(xiàn)且成本低;定位精度高,容錯性能好;定位信標體積小,可以附著在任何需要定位的移動或不移動物體上;除了被定位物體策動定位請求外,還允許外部網(wǎng)絡(luò)策動定位請求和監(jiān)控被定位物體。
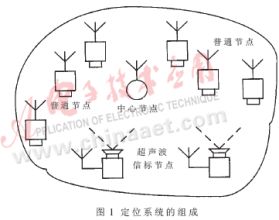
1 定位系統(tǒng)的組成
定位系統(tǒng)的組成如圖1所示。超聲波信標節(jié)點由無線收/發(fā)模塊、MCU、超聲波發(fā)射頭、與被定位物體通信的接口和電源等組成;傳感器節(jié)點(即普通節(jié)點" title="普通節(jié)點">普通節(jié)點)由無線收/發(fā)模塊、MCU、超聲波接收頭和電源等組成;而中心節(jié)點則由無線收/發(fā)模塊、DSP、與外部網(wǎng)絡(luò)(可用于策動定位請求和監(jiān)視追蹤目標)的接口等幾部分組成,具有極強的計算能力,用于控制定位系統(tǒng)中超聲波發(fā)射和接收的同步。每個普通節(jié)點的空間位置在這個定位系統(tǒng)構(gòu)筑期間已經(jīng)確定,并存儲在中心節(jié)點內(nèi)。定位請求可以由外部網(wǎng)絡(luò)通過中心節(jié)點發(fā)起,也可以由被定位物體通過其附著的超聲波信標節(jié)點發(fā)起,分別如圖2和圖3所示。定位請求的主要內(nèi)容是被定位物體的ID。
無論是誰發(fā)起的定位請求,當中心節(jié)點收到定位請求時,馬上以廣播方式發(fā)布定位公告(內(nèi)容包含被定位物體的ID和發(fā)起源標志)。超聲波信標節(jié)點收到與其所附物體相同ID的定位公告后,馬上發(fā)射超聲波信標;而普通節(jié)點i(1<i<n)收到定位公告后,便啟動計時器并接收超聲波信號。普通節(jié)點一旦接收到超聲波信號,馬上停止計時器,此刻計時器對應的時間ti就是該普通節(jié)點測得的超聲波收發(fā)時間差。每個普通節(jié)點把它所測得的時間差發(fā)送給中心節(jié)點,由中心節(jié)點來完成定位計算。

2 定位算法
定位算法是在定位系統(tǒng)的中心節(jié)點完成的。超聲波的傳播速度為:

式中,T為環(huán)境攝氏溫度。
假定被定位物體的三維坐標為(x,y,z)和至少有四個傳感器節(jié)點不在同一平面上,則被定位物體到傳感器節(jié)點的距離[3]為:

很明顯,(2)式是一組非線性超定方程,被定位物體的三維坐標估計值可用最小二乘法求出:

可以證明,只要每個傳感器節(jié)點對V·ti的測量誤差都滿足N(0,σ2)且相互獨立,則(3)式的結(jié)果是最大似然估計。隨著n的增加,它將是無偏估計。
3 定位系統(tǒng)的具體設(shè)計與實現(xiàn)
考慮到低成本和小型化的需要,本系統(tǒng)選用Nordic VLSI公司的單片無線收發(fā)模塊nRF2401[4]構(gòu)成無線傳感器網(wǎng)絡(luò)。該模塊工作在2.4~2.5GHz的ISM頻段上,典型輸出功率為0dBm,接收靈敏度為-90dB,無線傳輸距離為30~40m,這與20m左右的超聲波測距能力相當。該模塊是收/發(fā)半雙工" title="半雙工">半雙工的,總共125個頻道,頻道可以編程設(shè)置,頻道間隔為1MHz,頻道切換時間<200μs,還可以對同頻道上工作的模塊進行編址。該模塊支持ShockBurst工作模式,即利用片上FIFO,無線收/發(fā)的數(shù)據(jù)速率可達1Mb/s,而無線收/發(fā)模塊與MCU的數(shù)據(jù)交換速率則可以是低速的,如10kb/s。這樣做的好處是減少了無線電波發(fā)射時間、降低了能耗和空中無線電波發(fā)生沖突的機會,另外也降低了對MCU的速度要求。該模塊還支持DuoCeiver模式,通過一根天線同時接收兩個頻道的數(shù)據(jù)(第一個頻道可收可發(fā),設(shè)為CH1;第二個頻道只收不發(fā),且必為CH2=CH1+8MHz),并且兩路數(shù)據(jù)獨立地以三線制方式輸出。其它參數(shù)和功能可參見參考文獻[4]。
依據(jù)無線收發(fā)模塊的上述功能和參數(shù)以及定位系統(tǒng)所要達到的功能,本系統(tǒng)的無線通信采用簡單的單跳直接通信(包括上行和下行),因此網(wǎng)絡(luò)層相對比較簡單;由于收發(fā)模塊的半雙工工作模式和無線電信道的競爭,本系統(tǒng)的媒體介入層(MAC)較復雜,如圖4所示。
中心節(jié)點的第一頻道設(shè)置為CH1,并且半雙工可發(fā)可收,而第二頻道(必為CH2=CH1+8MHz)設(shè)置為可收,但兩個頻道平時都在收狀態(tài)。普通節(jié)點的第一頻道設(shè)置為CH1,并且半雙工可發(fā)可收,而第二頻道(必為CH2=CH1+8MHz)不用。普通節(jié)點平時處在收狀態(tài),而在需要發(fā)送時,普通節(jié)點依據(jù)預定義的時隙(與其ID關(guān)聯(lián))時分發(fā)送(TDMA)。信標節(jié)點的第一頻道設(shè)置為CH1,而第二頻道必為CH2=CH1+8MHz,平時都設(shè)置為收狀態(tài)。當信標節(jié)點發(fā)定位請求時,它的無線收/發(fā)模塊的第一頻道(因為只有第一頻道才能發(fā))被重配置為CH1+8MHz,與中心節(jié)點和其它處在收狀態(tài)的信標節(jié)點的第二頻道相對應。這樣做的真正目的是為了不干擾中心節(jié)點可能同時在CH1上發(fā)的由外部網(wǎng)絡(luò)策動的定位公告,保證外部網(wǎng)絡(luò)的定位請求優(yōu)先,而不與移動物體的定位請求競爭。定位請求發(fā)送完畢后,第一頻道恢復為CH1,此時第二頻道也恢復為CH2。很顯然,信標節(jié)點的第二頻道為CH2時,可用于監(jiān)聽別的信標節(jié)點的定位請求。
即使這樣,信標節(jié)點發(fā)出定位請求后仍然可能發(fā)生碰撞,而收不到相應的定位公告。其原因有二:其一是由無線收/發(fā)模塊半雙工的工作方式造成的,信標節(jié)點在發(fā)定位請求的同時,中心節(jié)點正在發(fā)外部網(wǎng)絡(luò)策動的定位公告;其二是無線電波碰撞,兩個或多個信標節(jié)點同時發(fā)定位請求。為有效解決這個問題,本系統(tǒng)規(guī)定信標節(jié)點在發(fā)出定位請求后的一段時間內(nèi)收不到與其對應的定位公告時,隨機延遲若干個定位周期,在其CH1和CH2上均未監(jiān)聽到信號后,重發(fā)定位請求。隨機延遲定位周期數(shù)的取值范圍依據(jù)系統(tǒng)的信標節(jié)點數(shù)量(或者最大可容納的數(shù)量)和正常情況下一個信標節(jié)點被請求定位的頻度來確定。
在特殊情況下,無線收/發(fā)模塊半雙工的工作方式還會造成中心節(jié)點在發(fā)出外部網(wǎng)絡(luò)策動的定位公告后系統(tǒng)收不到超聲波信標,也就是中心節(jié)點發(fā)外部網(wǎng)絡(luò)策動的定位公告的同時,與這個定位公告對應的被定位物體正在發(fā)定位請求。發(fā)生這種情況的概率極低,信標節(jié)點的處理方法同上(因為信標節(jié)點也收不到對應的定位公告),而中心節(jié)點在等不到超聲信標后,出現(xiàn)空閑時就重發(fā)定位請求。
4 超聲波收發(fā)時間差的修正
為了準確地測出被定位物體的精確坐標,超聲波的收發(fā)時間差必須測得非常準確。表1是中心節(jié)點發(fā)出定位公告后,與測量時間差有關(guān)的事件及對應時刻。
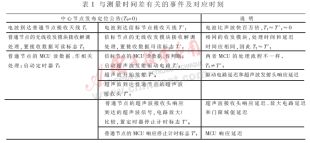
在普通節(jié)點中定時器獲得的時間差是T′7-T3。很明顯,這不是超聲波所測距離的傳播時間,真正的傳播時間應為T′5-T′4。測出每一步的時延,然后再計算出超聲波所測距離的真正傳播時間是復雜和不現(xiàn)實的。只要讓普通節(jié)點的超聲波接收頭與信標節(jié)點的超聲波發(fā)射頭零距離,運行一次,讀取普通節(jié)點中定時器的值t校正,則系統(tǒng)正式運行時,超聲波所測距離的真正傳播時間為:
t′i=ti-t校正(4)
用t′i代替(2)式和(3)式中的ti,經(jīng)過計算將得到更準確的被定位物體的坐標。
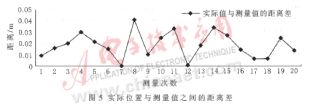
5 實驗結(jié)果和結(jié)論
很顯然,本系統(tǒng)可以獨立存在和運行,可以廣泛應用于其它需要精確定位的系統(tǒng)中。圖5顯示了一個定位目標使用本系統(tǒng)測定位置時,測量值和實際值之間的距離差;實驗結(jié)果表明本系統(tǒng)達到了設(shè)計目標。影響定位精度的因素主要來源于應用環(huán)境的溫度梯度、風速和超聲波的LOS傳播路徑等。
參考文獻
1 付維權(quán),孫志仁,曹奇英. 普適計算中的定位感知系統(tǒng)[J].單片機與嵌入式系統(tǒng)應用, 2004(2):15~18
2 杜高社,高 瑋,趙 琳. 脈沖激光測距中時間放大技術(shù)實驗研究[J]. 應用光學, 2003;24(5):16~19
3 林志斌,徐柏齡. 基于傳聲器陣列的聲源定位[J]. 電聲技 術(shù), 2004(5):19~23
4 Data Sheet of nRF2401:Single Chip 2.4GHz Radio Tansceiver. http://www.nvlsi.no