
引 言
反應(yīng)速度更快、精度更高、目標(biāo)的自動(dòng)錄取、使操作員能夠同時(shí)處理多批目標(biāo),是現(xiàn)代雷達(dá)所追求的技術(shù)指標(biāo)。雷達(dá)視頻信號(hào)的數(shù)字采集和檢測(cè)是達(dá)成這樣目標(biāo)的前提條件。眾所周知,雷達(dá)對(duì)目標(biāo)位置的測(cè)量,主要是依據(jù)目標(biāo)回波相對(duì)于發(fā)射電波的延遲時(shí)間以及雷達(dá)天線的方向來(lái)決定的。電波的傳播速度極快,傳播l海里的時(shí)間大約只有12.35μs,雷達(dá)發(fā)射電波的間隔一般在ms數(shù)量級(jí)。在此間隔時(shí)間內(nèi),理論上最多會(huì)有成百上千個(gè)目標(biāo)的回波。要在如此短的時(shí)間之內(nèi),對(duì)這么多的目標(biāo)回波信號(hào)進(jìn)行數(shù)字采集和處理,快速的采集器件及高速計(jì)算機(jī)處理器必不可少。DSP(Digital Signal Processor)芯片,即數(shù)字信號(hào)處理器,就是這樣一種特別適用于進(jìn)行這種實(shí)時(shí)信號(hào)處理的微處理器。本文以某雷達(dá)的技術(shù)參數(shù)為參考,用TMS320VC5402作為信號(hào)處理器,以AD9223為A/D變換器,采用雙端口存儲(chǔ)芯片IDT7203作數(shù)據(jù)暫存存儲(chǔ)器,介紹一種實(shí)現(xiàn)雷達(dá)回波信號(hào)的數(shù)字采集和處理方法。
1 主要器件特性
TMS320VC54x是TI公司開發(fā)的低功耗、高性能數(shù)字信號(hào)處理芯片,主要應(yīng)用于無(wú)線通信系統(tǒng)及雷達(dá)信號(hào)處
理系統(tǒng)等。本文所采用的TMS320VC5402芯片是此系列的一個(gè)典型產(chǎn)品。該芯片的主要特點(diǎn)有:速度快,指令周期10 ns,運(yùn)算能力為100 MIPS;強(qiáng)大的尋址能力,最大可尋址外部存儲(chǔ)器1 M×16位,內(nèi)置16 K×16位的RAM,4K×16位的ROM;40位的算術(shù)邏輯運(yùn)算單元(ALU),包括2個(gè)獨(dú)立的40位累加器和1個(gè)40位的桶形移位寄存器;1個(gè)17位×17位的硬件乘法器和1個(gè)40位的專用加法器,乘法器/加法器單元可在一個(gè)流水線狀態(tài)周期內(nèi)完成一次乘法累加運(yùn)算(MA)。
AD9223是一種采用高速CMOS處理和新穎的4級(jí)流水線結(jié)構(gòu)的高性能、低噪聲、單電源、12位模/數(shù)變換器。適用于航海、通信、雷達(dá)、醫(yī)療等領(lǐng)域的數(shù)據(jù)采集系統(tǒng)。其主要特點(diǎn)有:高速度、高分辨力,采樣時(shí)鐘頻率可達(dá)3 Msps,分辨力為12位;單時(shí)鐘輸入,采用單時(shí)鐘輸入控制內(nèi)部所有的轉(zhuǎn)換周期;模擬信號(hào)輸入靈活,真正的差分輸入結(jié)構(gòu)允許模擬信號(hào)以單端或差分兩種分式輸入;靈活的參考電壓,適應(yīng)不同應(yīng)用的精度及溫度漂移的要求,參考電壓可選擇內(nèi)部或外部(1 V或2.5 V);采用4級(jí)流水線結(jié)構(gòu)及寬帶取樣保持放大器(SHA),使器件在每個(gè)時(shí)鐘周期都可捕獲輸入的采樣信號(hào),數(shù)據(jù)的輸出延時(shí)為3個(gè)時(shí)鐘周期。
IDT7203是一種雙端口先進(jìn)先出(FIFO)9位存儲(chǔ)緩沖器,存儲(chǔ)容量為2 KB。輸入和輸出具有各自的地址指針,每一個(gè)讀或?qū)懖僮鳎瑢?duì)應(yīng)的輸出及輸入地址指針自動(dòng)加1。復(fù)位信號(hào)可將兩個(gè)地址指針全部清除。對(duì)外提供數(shù)據(jù)區(qū)空(empty)、半滿(half-full)及滿(full)信號(hào),用來(lái)指示器件的狀態(tài)。最快讀寫速度為12 ns。
2 二級(jí)門限判決的工作原理
雷達(dá)的視頻信號(hào)中始終包含有目標(biāo)信號(hào)和噪聲信號(hào),即x(t)=s(t)+n(t)。雷達(dá)信號(hào)處理的根本目的就是,從接收到的視頻信號(hào)x(t)中提取出有用的目標(biāo)信號(hào)s(t),濾除無(wú)用的雜波或干擾信號(hào)n(t)。在進(jìn)行雷達(dá)信號(hào)處理時(shí),預(yù)先并不知道目標(biāo)在一定條件下出現(xiàn)的概率,也很難確定一次漏警所造成的損失,故常采用奈曼一皮爾遜準(zhǔn)則,即在允許一定虛警概率的條件下,使漏警概率達(dá)到最小。二級(jí)門限判決方法,是一種有效而實(shí)用的雷達(dá)信號(hào)處理方法。
2.1 二級(jí)門限判決原理
由最佳檢測(cè)理論知道,對(duì)于非相參高頻脈沖串,采用檢波后的積累(視頻積累)來(lái)改善雷達(dá)檢測(cè)性能是一種最佳方案,其原理如圖1所示。這種方案若采用模擬電路處理,比較復(fù)雜,實(shí)現(xiàn)起來(lái)也相當(dāng)困難;若采用數(shù)字化處理,直觀的辦法是將雷達(dá)接收機(jī)的視頻信號(hào)按距離(時(shí)間)和幅度進(jìn)行量化處理變?yōu)閿?shù)字信號(hào),然后存儲(chǔ)N個(gè)重復(fù)周期。對(duì)每一個(gè)重復(fù)周期按距離單元對(duì)每一個(gè)單元的信號(hào)幅度值設(shè)定一個(gè)門限值(r0),稱為第一門限。對(duì)每一個(gè)重復(fù)周期所量化的所有距離單元的視頻信號(hào)值x(ti),與其相對(duì)應(yīng)的門限值roi進(jìn)行幅度值的比較。如果視頻信號(hào)值超出它的門限值,認(rèn)為是“可能目標(biāo)”信號(hào);否則,認(rèn)為無(wú)信號(hào)。這個(gè)過(guò)程稱為第一級(jí)門限判決。對(duì)應(yīng)于每一個(gè)重復(fù)周期內(nèi)每一個(gè)距離單元所建立的第一門限值(roi)是各不相同的,而且,每一個(gè)重復(fù)周期所建立的也各不相同。這里將每一個(gè)重復(fù)周期所建立的第一門限值的集合稱為雜波均值估值表或叫雜波圖。對(duì)于“可能目標(biāo)”信號(hào),并不能肯定它一定是目標(biāo)信號(hào)。因?yàn)橛袝r(shí)突發(fā)的雜亂干擾信號(hào)或隨機(jī)噪聲信號(hào),各次掃描的取樣是不相關(guān)的。它們可能會(huì)偶然一二次超過(guò)第一門限值,但連續(xù)多次超過(guò)第一門限值的可能性很小;而對(duì)于目標(biāo)來(lái)說(shuō),相鄰各次掃描均應(yīng)有回波信號(hào),在N個(gè)取樣中連續(xù)超過(guò)第一門限值的概率較大。因此,需要按距離單元將超過(guò)各自第一門限值的量化脈沖進(jìn)行計(jì)數(shù),如果在N個(gè)重復(fù)周期中有K個(gè)以上的量化脈沖超過(guò)各自的第一門限值,則判決為有信號(hào)。這個(gè)過(guò)程稱為第二級(jí)門限判決(K/N判決),而K/N稱為第二門限值,工作原王單如圖2所示

2.2 雜波均值估值表的建立
雜波均值估值表(雜波圖),是根據(jù)每個(gè)重復(fù)周期雷達(dá)視頻信號(hào)的量化值所建立起來(lái)的每個(gè)距離單元的雜波信號(hào)的平均值表。建立的方法為鄰近單元平均估值法。具體是,設(shè)某個(gè)距離單元ti上的視頻信號(hào)為x(ti),以ti單元為中心,前后共取n個(gè)參考距離單元,對(duì)這n個(gè)參考單元的視頻信號(hào)數(shù)值求平均值
作為這個(gè)距離單元的雜波平均估值。也叫作這個(gè)距離單元的第一門限值roi值的大小由雷達(dá)探測(cè)區(qū)域的雜波環(huán)境所決定。n值愈小,由于參考單元太少,會(huì)引起雜波平均估值的起伏變化愈大,將引起虛警概率的增加;而n值愈大時(shí),雜波的平均估值起伏愈小,即第一門限值愈平穩(wěn),可得到恒虛警效果,但會(huì)使得資源開銷增大,增加實(shí)現(xiàn)的難度。對(duì)于氣象和海浪雜波來(lái)說(shuō),它們通常是連接成片的區(qū)域,比較適合采用鄰近單元平均估值法建立雜波均值表。這里n取16。由于以52.5 m為一個(gè)距離單元,相當(dāng)于對(duì)檢測(cè)點(diǎn)前后各420 m
的距離范圍取雜波的平均估值。
2.3 第二級(jí)門限值K/N的計(jì)算
為保證符合奈曼一皮爾遜準(zhǔn)則,N值的選擇應(yīng)取決于天線波束掃過(guò)目標(biāo)的時(shí)間內(nèi)目標(biāo)的回波脈沖數(shù),是由雷達(dá)的工作參數(shù)決定的。對(duì)于某船用雷達(dá)來(lái)說(shuō),其部分工作參數(shù)為:重復(fù)頻率1 200 Hz,觸發(fā)脈沖寬度O.7μs,天線轉(zhuǎn)速20 r/min,天線波束寬度O.7°,作用距離40海里。N的取值為N=O.7×1 200/(20×6)=7。根據(jù)經(jīng)驗(yàn),K的取值為1.5√N。這里K=4,即K/N=4/7。
3 硬件電路設(shè)計(jì)
硬件電路工作原理如圖3所示。根據(jù)雷達(dá)的主要技術(shù)參數(shù),得知雷達(dá)的距離分辨力為150×0.7=105 m,在不降低原雷達(dá)性能的前提下,這里選擇2.857 142 857 MHz的采樣頻率(相當(dāng)于以52.5 m作為一個(gè)采樣距離單元)。存儲(chǔ)器以同樣的速率采集數(shù)據(jù)(大約每52.5 m采集一個(gè)雷達(dá)視頻信號(hào)的數(shù)值)。這樣的話,40海里的最大測(cè)距量程,對(duì)應(yīng)于雷達(dá)的每一次發(fā)射,電路應(yīng)當(dāng)采集1 412個(gè)距離單元的視頻信號(hào)量化值(這里取1500個(gè)距離單元),因此,雙端口RAM容量選用2 KB即可。由于訪問(wèn)速度要快,選用了IDT7203。對(duì)于信號(hào)的量化位數(shù),即A/D轉(zhuǎn)換位數(shù)的選擇,考慮到量化噪聲的影響,所取的位數(shù)愈多影響愈小。為照顧DSP的處理能力以及A/D轉(zhuǎn)換器件的轉(zhuǎn)換速度,采用12位。
擊看大圖")
A/D轉(zhuǎn)換器AD9223的設(shè)置:采用片內(nèi)2.5 V作為參考電壓;VINB接參考電壓值,這樣VINA的輸入值最大可到5 V,最小為O V;運(yùn)算放大器U3提供的視頻信號(hào)應(yīng)當(dāng)符合這個(gè)要求。
雷達(dá)的觸發(fā)脈沖作為系統(tǒng)工作的同步信號(hào),從觸發(fā)脈沖的下降沿開始,為A/D轉(zhuǎn)換器提供2.857 142 857 MHz的采樣同步脈沖信號(hào),A/D轉(zhuǎn)換器產(chǎn)生的12位精度的視頻信號(hào)數(shù)值以同樣的速率被打入到二片雙端口RAM(IDT7203)中。當(dāng)打入的數(shù)據(jù)達(dá)到1 504個(gè)時(shí)(由于A/D轉(zhuǎn)換器的數(shù)據(jù)輸出對(duì)視頻輸入信號(hào)有3個(gè)時(shí)鐘周期的延遲,因此,這里采用采集1 504個(gè)距離單元的數(shù)據(jù)),對(duì)DSP產(chǎn)生一個(gè)中斷信號(hào)。這些信號(hào)是由大規(guī)模可編程邏輯器件(Lattice M4A5-128/64)根據(jù)雷達(dá)觸發(fā)脈沖、晶體振蕩器以及DSP的I/O操作所產(chǎn)生的地址信號(hào)和讀寫信號(hào)共同作用而產(chǎn)生的。它們的時(shí)序關(guān)系如圖4所示。

DSP對(duì)中斷信號(hào)響應(yīng)后,執(zhí)行數(shù)據(jù)接收的中斷服務(wù)程序。該程序以極快的速度把雙端口RAM中的數(shù)據(jù)提取到自己的內(nèi)部存儲(chǔ)器中,這時(shí)DSP再運(yùn)行濾波和目標(biāo)提取程序,最后將完全處理好的數(shù)據(jù)通過(guò)串行接口傳送出去。
雙端口RAM的讀信號(hào)RAMRD在執(zhí)行讀OFF00H地址的指令時(shí),由DSP產(chǎn)生的地址信號(hào)(OFF00H)、WR信號(hào)以及10STRB信號(hào)的共同作用而產(chǎn)生。
4 軟件設(shè)計(jì)
軟件的主要任務(wù)是處理已經(jīng)被數(shù)字化了的視頻信號(hào)。為了實(shí)現(xiàn)快速處理,程序采用匯編語(yǔ)言編寫,保證在一個(gè)重復(fù)周期內(nèi)將數(shù)據(jù)處理完畢。程序運(yùn)行的區(qū)域安排在TMS320VC5402片內(nèi)RAM的0000H~03FFH的1 KB內(nèi)存中。數(shù)據(jù)輸入?yún)^(qū)在0400H~09FFH,占1.5 KB內(nèi)存。雜波均值估值表(雜波圖)位于OA00H~OFFFH,占1.5 KB內(nèi)存。輸出數(shù)據(jù)區(qū)(處理結(jié)果)位于1000H~15FFH,占1.5 KB內(nèi)存。從1600H開始至3FFFH的10.5 KB存儲(chǔ)區(qū),被平均分為7個(gè)數(shù)據(jù)區(qū),作為7個(gè)重復(fù)周期的數(shù)據(jù)積累區(qū)。對(duì)于存儲(chǔ)雷達(dá)視頻信號(hào)量化數(shù)據(jù)的每一個(gè)存儲(chǔ)區(qū),其每一個(gè)地址單元的地址代表一個(gè)距離單元,其內(nèi)存儲(chǔ)的數(shù)據(jù)代表該距離單元處視頻信號(hào)的幅度量化值。程序響應(yīng)中斷后,工作過(guò)程為:數(shù)據(jù)的采集→建立雜波均值估值表(雜波圖)→第一門限判決→第二門限判決→數(shù)據(jù)輸出。方位信號(hào)的采集以及處理以后數(shù)據(jù)的輸出,此處不作討論。
4.1數(shù)據(jù)的采集
由于TMS320VC5402運(yùn)行的速度極快,單指令周期為10 ns,而雙端口RAM的最快訪問(wèn)速度為12 ns。為了保證數(shù)據(jù)的可靠讀取,把I/0操作設(shè)置為延遲2個(gè)執(zhí)行周期。DSP對(duì)于外部中斷0(INTO)響應(yīng)后進(jìn)人中斷服務(wù),把雙端口RAM中的數(shù)據(jù)讀到DSP的內(nèi)置存儲(chǔ)器以0408H起始的1500個(gè)單元中。程序初始化時(shí),將0400H起始的8個(gè)單元設(shè)置為0。這完全是為了計(jì)算雜波均值估值表(雜波圖)時(shí)的編程方便,其程序如下:
GETDATA:STM #0408H,AR6 ;初始地址
RPT#(1500—1) ;重復(fù)次數(shù)
PORTR OFF00H,*AR6+ ;讀數(shù)據(jù)
RETE &nbs
p; ;中斷返回
4.2 建立雜波均值估值表
根據(jù)3.2雜波均值估值表的建立方法,對(duì)每一個(gè)距離單元,前取8個(gè),后取7個(gè),共16個(gè)作參考單元,計(jì)算平均值,作該單元的雜波均值估值。總共計(jì)算1500個(gè)距離單元的雜波均值估值,放置于OA00H~OFFFH的存儲(chǔ)區(qū)域。具體實(shí)現(xiàn)時(shí),須先計(jì)算出第一個(gè)單元的雜波平均值估值,其后的逐個(gè)計(jì)算。程序代碼如下:
STM #O4ooH,AR5 ;讀入數(shù)據(jù)的首址
STM #OA00H,AR7 ;均值估值首址
RPTZ A,(16—1) ;循環(huán)16次
ADD*AR5+,A ;求和
STL A,一4,*AR7+ ;除以16,放入估值表
STM #0400H,AR6 ;計(jì)算余下的1 499個(gè)
STM#(1500—2),BRC
RPTB ZBEND一1
SUB*AR6+,A
ADD*AR5+,A
STL A,一4,*AR7+
ZBEND:RET
4.3 第一級(jí)門限判決
將讀入的雷達(dá)視頻信號(hào)值以距離單元為單位,逐個(gè)與雜波均值估值表中對(duì)應(yīng)距離單元的數(shù)值作比較:如果某單元雷達(dá)視頻信號(hào)的數(shù)值較其對(duì)應(yīng)的雜波均值估值大,認(rèn)為此單元為“可能目標(biāo)”的回波信號(hào),將它放置到數(shù)據(jù)積累區(qū)中(1600H起始)相應(yīng)的單元,同時(shí)也放置到輸出數(shù)據(jù)塊中(1000H起始);否則,這兩個(gè)單元都被清零。程序中用AR3作數(shù)據(jù)積累區(qū)的地址指針,其初值為1600H,由初始化程序設(shè)置。程序代碼如下:
STM #0408H,AR7 ;輸入數(shù)據(jù)區(qū)首址
STM #oA00H,AR6 ;均值估值表首址
STM #1000H,AR5 ;輸出數(shù)據(jù)區(qū)首址
STM#(1500—1),BRC: ;距離單元總數(shù)
RPTB PJlE一1 ;重復(fù)
LD*AR6+,A ;取雜波均值估值
STM*AR7,T ;取輸入的數(shù)據(jù)
ST #0,*AR3 ;積累區(qū)先清零
ST #O,*AR5 ;輸出區(qū)先清零
SUB*AR7+,A ;比較
STRCD*AR3+,ALT ;數(shù)據(jù)大,分別放置
STRCD*AR5+,ALT ;到積累區(qū)和輸出區(qū)
PJlE:LD AR3,B ;調(diào)整積累區(qū)指針
ADD #100H,B
AND #OFF00H,B
SUB #4000H,B
BC PJlEND,BLT
SUB #2A00H,B
PJIEND:ADD #4000H
,B
STML B,AR3 ;調(diào)整積累區(qū)指針結(jié)束
RET
4.4 第二級(jí)門限判決
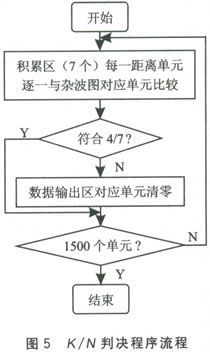
第二門限判決就是在第一門限判決的基礎(chǔ)上,濾除那些偶然超過(guò)第一門限,但是又是在多次掃描中,孤立的、互不相關(guān)的雜波噪聲信號(hào),就是對(duì)那些“可能目標(biāo)”的信號(hào)作進(jìn)一步的處理,進(jìn)一步降低檢測(cè)目標(biāo)的虛警概率。根據(jù)2.3節(jié)的討論,第二門限值(K/N)的取值為4/7。由于在第一門限判決處理時(shí)已經(jīng)建立了7次掃描的累積數(shù)據(jù)和初步的輸出數(shù)據(jù),它們分別位于數(shù)據(jù)累積區(qū)和數(shù)據(jù)輸出區(qū)。因此,在程序的具體實(shí)現(xiàn)時(shí),就是根據(jù)最新的積累數(shù)據(jù),對(duì)量程范圍內(nèi)的每個(gè)距離單元逐個(gè)進(jìn)行K/N判決,符合K/N判決準(zhǔn)則的,輸出數(shù)據(jù)區(qū)的數(shù)值不變,而不符合準(zhǔn)則的將該距離單元所在數(shù)據(jù)輸出區(qū)的數(shù)值清零。由于程序代碼較長(zhǎng),用圖5所示流程表示。
結(jié) 語(yǔ)
本文介紹的基于DSP的雷達(dá)視頻信號(hào)的數(shù)字采集和處理系統(tǒng)的設(shè)計(jì),作為一種雷達(dá)視頻信號(hào)處理的方法,適用于多種雷達(dá)的信號(hào)處理,對(duì)于不同型號(hào)的雷達(dá),由于其用途的不同,其技術(shù)參數(shù)也不相同。只要選擇合適的工作參數(shù),此設(shè)計(jì)對(duì)其他種類雷達(dá)的視頻信號(hào)仍然適用。