
變頻技術(shù)作為現(xiàn)代電力電子的核心技術(shù),集現(xiàn)代電子、信息和智能技術(shù)于一體。針對工頻(我國為50 Hz)并非是所有用電設(shè)備的最佳工作頻率,因而導致許多設(shè)備長期處于低效率、低功率因數(shù)運行的現(xiàn)狀,變頻控制提供了一種成熟、應(yīng)用面廣的高效節(jié)能新技術(shù)。
而SPWM(正弦波脈寬調(diào)制)波的產(chǎn)生和控制則是變頻技術(shù)的核心之一。開始的SPWM生成技術(shù)是采用模擬電路構(gòu)成三角波和正弦波發(fā)生電路,用比較器來確定他們的交點。這種方法電路復雜,精度較差,早已淘汰。后來人們采用單片機和微機生成SPWM波,但受硬件計算速度和算法計算量的影響,往往無法兼顧計算的精度和速度。再后來隨著具有強大運算能力的DSP和一些新算法的出現(xiàn),這一問題得到了較好地解決。
1 算法的原理
一般SPWM波形的產(chǎn)生有以下幾種方法:自然采樣法、規(guī)則采樣法、低次諧波消去法直接面積等效法等。其中自然采樣法的精度很高,但他求解導通關(guān)斷點需要解一個超越方程,計算量很大,一般不被采用。低次諧波消去法計算復雜,只能用查表法,而且這種方法的波形頻率和幅值是不可以連續(xù)變化的。因此將主要分析規(guī)則采樣法,直接面積等效法這兩種方法的原理。
規(guī)則
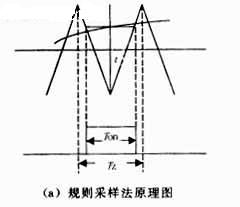
采樣法是從自然采樣法演變而來的,他由經(jīng)過采樣的正弦波(實際上是階梯波)與三角波相交,由交點得出脈沖寬度。這種方法只在三角波的頂點或底點位置對正弦波采樣而形成階梯波。其原理如圖1(a)所示。
其中:![]()
Tz: 三角載波周期
M: 調(diào)制深度(正弦波與三角波幅值比)
t:某采樣時刻
直接面積等效法的基本原理如圖1(b)所示。
在圖中的正弦半波波形中取一小區(qū)間[t,t+Δt],其面積為S1,則與其面積相等的矩形脈沖面積為S2,寬度為δi。設(shè)正弦波幅值為Usin,調(diào)制度為M,矩形脈沖幅值為Us。有

式中k代表第k次采樣,N代表半周期內(nèi)對正弦波的采樣點。則IGBT的開關(guān)時間可如下計算:
2 算法的分析及其在DSP上的實現(xiàn)
(1)算法的分析
在生成SPWM波形時,通常有查表和實時計算兩種方法,實際使用時往往是兩種方法的結(jié)合,即先離線進行必要的計算存入內(nèi)存,運行時再進行較為簡單的在線計算,這樣既可保證快速性,又不會占用大量的內(nèi)存。
規(guī)則采樣法通常事先存入正弦函數(shù)表和不同載波頻率時的Tz/2,運行時根據(jù)要求的Tz,M和ω即可算出開關(guān)器件的導通時間(詳見公式1)。這種方法的計算量很小且波形的幅值和頻率都是可以連續(xù)變化的。
直接面積等效法通常事先存入不同頻率下的余弦函數(shù)表,運行時也只要進行簡單的乘法和減法運算(詳見公式2)。這種方法的計算量適中且波形的幅值和頻率也是連續(xù)變化的。
由規(guī)則采樣法的原理可知他是用一近似的階梯波來代替正弦波與三角波進行比較,因此他的精度較低,但由于計算簡單,在使用單片機和微機生成SPWM波的時代得到了較為廣泛的應(yīng)用。但隨著具有強大運算能力的DSP的出現(xiàn),使得兼顧計算的精度和速度這一問題有了解決的希望。因此采用具有較高精度且計算量適中的直接面積等效法和DSP相結(jié)合來解決這一問題。
(2)DSP的特點
DSP的廠家很多,國內(nèi)應(yīng)用主要以TI公司的居多。這里采用TI公司的TMS320系列。TI公司的TMS320C2000 DSP是基于320C2xLP核。為了實現(xiàn)小數(shù)的算術(shù)運算和驗證小數(shù)的乘積,C2xLP的乘積寄存器的輸出通過乘積移位器,以抑制運算中產(chǎn)生的多出來的Bit。該乘積定標移位器允許作128個乘積累加而不會產(chǎn)生溢出。基本的乘積累加(MAC)周期,包括將一個數(shù)據(jù)存儲器的值乘以一個程序存儲器的值,并將結(jié)果加給累加器。當C2000循環(huán)執(zhí)行MAC,則程序計數(shù)器自動增量,并將程序總線釋放給第二個操作數(shù),從而達到單周期執(zhí)行MAC。
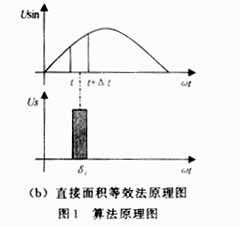
C2000系列中的C24x系列的芯片具有事件管理器。該事件管理器具有3個加/減定時器和9個比較器,可以和波形產(chǎn)生邏輯配合產(chǎn)生12 PWM的輸出。支持同步的和異步的PWM產(chǎn)生。他還支持一個空間向量PWM狀態(tài)機,用開關(guān)功率晶體管來實現(xiàn),以延長晶體管的壽命和降低功耗。一個關(guān)機段產(chǎn)生單元也有助于保護功率晶體管。其原理如圖2所示。
可以看到,為了實現(xiàn)實時的變壓與變頻,需要根據(jù)當前載波所在時間T做大量的運算,而這些運算都要求在一個載波周期內(nèi)完成。以載波頻率為15625Hz為例,其周期為64μs,若要求三相輸出,則所有這些運算都要求在32μs內(nèi)完成。這對于單片機而言,是完全不可能的。而對于DSP而言,其指令周期為50ns,且多為單周期指令,并且有單周期的乘法指令。因此,充分利用了DSP的強大運算能力,才最終實現(xiàn)了上述計算的實時完成。
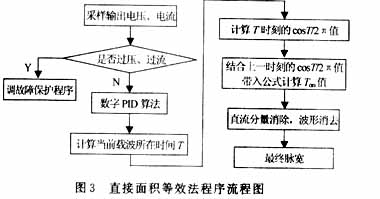
(3)直接面積等效法的實現(xiàn)
根據(jù)直接面積等效法的公式,在Flash中存入1個cosX/2π的表,這樣就可以盡可能簡化不必要的運算。在實際計算時只需計算1次減法、1次乘法、1次除法即可。
程序流程圖見圖3。
3 變頻系統(tǒng)的最終實現(xiàn)
根據(jù)上述設(shè)計,使用IPM(智能功率模塊)及相應(yīng)的整流,濾波電路搭建了一變頻實驗系統(tǒng)。出于擴展的要求,使用單片機擴展了其的輸入輸出接口,使其具有更好的通用性。其硬件結(jié)構(gòu)如圖4所示。
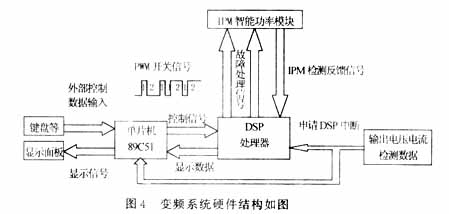
如圖4所示,基于DSP的SPWM控制系統(tǒng)中,包括三大模塊:IPM智能功率模塊、DSP處理器和單片機。DSP處理器用于實時產(chǎn)生PWM脈沖信號,用以控制IPM產(chǎn)生輸出信號。單片機系統(tǒng)用于接受外部控制信號,負載端電壓、電流的采樣信號,各種電路保護信號等輸入信號,一方面進行工作狀態(tài)的實時顯示,另一方面對實時采樣的電壓電流信號進行處理后,向DSP系統(tǒng)送去相應(yīng)信號,使DSP在線調(diào)整SPWM信號,滿足閉環(huán)工作的技術(shù)指標要求。這樣的系統(tǒng)構(gòu)成模式使系統(tǒng)功能模塊化,可最大限度地發(fā)揮DSP的計算能力,調(diào)試方便,便于系統(tǒng)的功能擴充,為以后系統(tǒng)的升級換代提供了較為方便的條件。
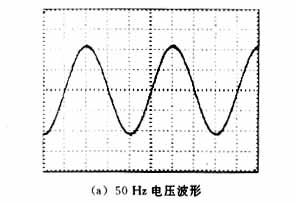
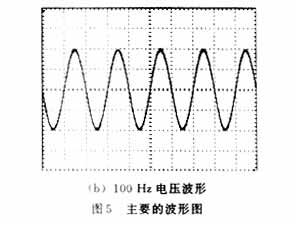
通過該實驗系統(tǒng),實現(xiàn)了輸出頻率可在1~1000Hz內(nèi)變化的SPWM波形的生成。其主要波形如圖5所示。
4 結(jié)論
研究表明,以DSP為核心基于直接面積等效法生成SPWM波的變頻實驗系統(tǒng)是成功的。其較寬的變頻范圍和擴展的輸入輸出接口使其在變頻電源、變頻器等多方面都能得到廣泛的應(yīng)用。