
摘? 要: 移動(dòng)終端" title="移動(dòng)終端">移動(dòng)終端的位置是移動(dòng)互聯(lián)網(wǎng)中的關(guān)鍵信息。本文從移動(dòng)定位技術(shù)" title="定位技術(shù)">定位技術(shù)的基本概念、分類方法、移動(dòng)通信網(wǎng)中的定位技術(shù)等方面對(duì)其進(jìn)行了闡述。
關(guān)鍵詞: 移動(dòng)互聯(lián)網(wǎng)? 定位技術(shù)? 移動(dòng)通信
?
移動(dòng)終端的位置信息" title="位置信息">位置信息是移動(dòng)互聯(lián)網(wǎng)中的關(guān)鍵信息,利用移動(dòng)定位信息開展的服務(wù)將是移動(dòng)互聯(lián)網(wǎng)上的一種特色服務(wù)。獲取移動(dòng)定位信息的定位技術(shù)及其定位系統(tǒng)" title="定位系統(tǒng)">定位系統(tǒng)已經(jīng)成為當(dāng)前的研究熱點(diǎn)。
1 移動(dòng)定位的基本概念
移動(dòng)定位涉及計(jì)算機(jī)科學(xué)技術(shù)、數(shù)學(xué)和移動(dòng)無線通信技術(shù)等多個(gè)學(xué)科的知識(shí),某些有關(guān)移動(dòng)定位的基本概念比較容易混淆,因此有必要首先澄清一些基本概念[1]。
1.1 物理位置信息和抽象位置信息
定位系統(tǒng)提供的位置信息可以分為兩類:物理意義上的位置信息和抽象意義上的位置信息。所謂物理意義上的位置信息,就是指被定位物體具體的物理或數(shù)學(xué)層面上的位置數(shù)據(jù),例如,GPS可以測得一幢建筑位于北緯50°47’21”,東經(jīng)110°56’49”,海拔20.3米。相對(duì)而言,抽象的位置信息可以表達(dá)為:這棟建筑物位于公園的小樹叢中或校園的主教學(xué)樓附近等等。
從應(yīng)用程序的角度講,不同的應(yīng)用程序需要的位置信息抽象層次也不盡相同,有些只需要物理位置信息;而有些則需要抽象意義上的位置信息,單純的物理位置信息對(duì)它們來說是透明的,或是沒有意義的。當(dāng)然,物理位置信息可以在附加信息庫的幫助下,轉(zhuǎn)換并映射為抽象層次的位置信息,在這里,附加的信息庫往往是外部提供的數(shù)據(jù)源。
不同的定位系統(tǒng)可以提供的位置信息抽象層次也不同。GPS是一種典型的可以提供物理位置信息的定位系統(tǒng);而移動(dòng)通信網(wǎng)絡(luò)中普遍使用的CellID定位只能告訴應(yīng)用程序被定位物體當(dāng)前所在的蜂窩小區(qū)ID號(hào)。
1.2 相對(duì)位置和絕對(duì)位置
定位系統(tǒng)提供的位置數(shù)據(jù)還有相對(duì)和絕對(duì)之分。在這里,相對(duì)和絕對(duì)的概念與物理學(xué)中的相對(duì)和絕對(duì)的概念類似。絕對(duì)位置是指在同一個(gè)參照系前提下的位置,例如,所有的GPS接收設(shè)備所提供的經(jīng)度、緯度、海拔等數(shù)據(jù)都是基于同一個(gè)參照系的,在同一地理位置的兩個(gè)GPS接收設(shè)備顯示的位置信息是相同的。
而相對(duì)位置是在不同的參照系中得出的,每一個(gè)物體都可能有自己的參照物。處于相同地理位置的物體因?yàn)閷?duì)應(yīng)的參照物不同,位置數(shù)據(jù)的讀數(shù)也可能不同。
1.3 定位精度" title="定位精度">定位精度和定位準(zhǔn)確度
定位精度和定位準(zhǔn)確度是兩個(gè)緊密聯(lián)系的概念,它們之間的關(guān)系類似于數(shù)理統(tǒng)計(jì)學(xué)中置信區(qū)間和概率之間的關(guān)系。嚴(yán)格說來,如果孤立的指出某個(gè)定位系統(tǒng)的定位精度或定位準(zhǔn)確度,都是沒有意義的。典型的正確描述應(yīng)該是:A定位系統(tǒng)可以在95%的概率下達(dá)到10m的定位精度。其中,“95%”描述的是定位準(zhǔn)確度。定位精度越高,相應(yīng)的定位準(zhǔn)確度就越低,反之亦然。
不同的應(yīng)用程序?qū)Χㄎ痪韧兄约禾厥獾摹⒚鞔_的要求(而忽略或含糊其詞對(duì)定位準(zhǔn)確度的要求)。例如,老人或兒童監(jiān)護(hù)需要的定位精度為500m以內(nèi),而某些室內(nèi)的應(yīng)用則可能需要厘米級(jí)的定位精度。美國聯(lián)邦通信委員會(huì)(FCC,Federal Communications Commission)則同時(shí)對(duì)定位精度和準(zhǔn)確度作出了明確的規(guī)定:FCC要求在2001年10月1號(hào)以前所有的“911”呼叫定位服務(wù)需要精確到125米,而且準(zhǔn)確率要達(dá)到67%。
通過增加定位設(shè)備的密度或綜合使用多種不同的定位技術(shù),可以同時(shí)提高定位系統(tǒng)的精度和準(zhǔn)確度。一般說來,室內(nèi)應(yīng)用需要的定位精度要比室外應(yīng)用高。
1.4 基于移動(dòng)終端的定位和基于網(wǎng)絡(luò)的定位
從定位策略的角度來看,定位技術(shù)/系統(tǒng)可以分為基于移動(dòng)終端的定位和基于網(wǎng)絡(luò)的定位兩種。基于移動(dòng)終端的定位是指定位計(jì)算是由移動(dòng)終端自己完成的,移動(dòng)終端可以自行確定自己當(dāng)前的位置。這種定位策略也稱為移動(dòng)終端的自定位,在蜂窩網(wǎng)絡(luò)中又叫做前向鏈路定位。基于移動(dòng)終端的定位系統(tǒng)便于保護(hù)移動(dòng)終端用戶的隱私(這里的隱私是指用戶當(dāng)前的位置信息)不受侵犯,但是要求移動(dòng)終端有較強(qiáng)的計(jì)算能力和持久的供電能力。基于網(wǎng)絡(luò)的定位主要由網(wǎng)絡(luò)系統(tǒng)收集待定位移動(dòng)終端的信息并計(jì)算移動(dòng)終端的當(dāng)前位置。這類定位策略在蜂窩網(wǎng)絡(luò)中又叫做反向鏈路定位。前一種定位策略需要在用戶終端中植入智能,而后者則需要在網(wǎng)絡(luò)設(shè)備中植入智能并計(jì)算獲得位置信息。基于網(wǎng)絡(luò)的定位系統(tǒng)要求待定位移動(dòng)終端發(fā)送或廣播一些特定的信號(hào),網(wǎng)絡(luò)系統(tǒng)負(fù)責(zé)收集這些信號(hào),并擔(dān)負(fù)起定位計(jì)算的任務(wù)。在實(shí)際應(yīng)用中,通過一些策略控制,基于網(wǎng)絡(luò)的定位系統(tǒng)也可以有效的保護(hù)用戶的隱私。
如果再對(duì)以上的兩種定位策略進(jìn)行細(xì)分,前一種定位策略又可以分為基于移動(dòng)終端的定位(Handset-based location)和網(wǎng)絡(luò)輔助定位(Network-assisted location)兩種;而后一種定位策略又可以分為基于網(wǎng)絡(luò)的定位(Network-based location)和移動(dòng)終端輔助定位(Handset-assisted location)兩種。其中網(wǎng)絡(luò)輔助定位是由網(wǎng)絡(luò)端輔助移動(dòng)終端進(jìn)行定位測量并由移動(dòng)終端進(jìn)行定位計(jì)算的定位;移動(dòng)終端輔助定位是指由移動(dòng)終端輔助網(wǎng)絡(luò)端進(jìn)行定位測量并由網(wǎng)絡(luò)端進(jìn)行定位計(jì)算的定位。
其他評(píng)價(jià)和區(qū)分定位系統(tǒng)的因素還有覆蓋范圍、成本、可否對(duì)定位物體進(jìn)行自動(dòng)識(shí)別等,這里就不贅述了。
2 移動(dòng)定位技術(shù)的分類
定位技術(shù)大致可以分為三種類型:基于三角關(guān)系和運(yùn)算的定位技術(shù)、基于場景分析的定位技術(shù)和基于臨近關(guān)系的定位技術(shù)。
2.1 基于三角關(guān)系和運(yùn)算的定位技術(shù)
這種定位技術(shù)根據(jù)測量得出的數(shù)據(jù),利用幾何三角關(guān)系計(jì)算被測物體的位置,它是最主要的、也是應(yīng)用最為廣泛的一種定位技術(shù)。基于三角關(guān)系的定位技術(shù)可以細(xì)分為兩種:基于距離測量的定位技術(shù)和基于角度測量的定位技術(shù)。
2.1.1 基于距離測量的定位技術(shù)
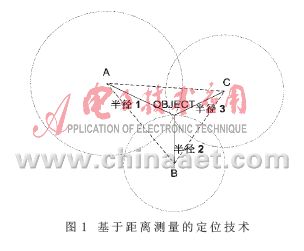
如圖1所示,這種定位技術(shù)先要測量已知位置的參考點(diǎn)(A,B,C三點(diǎn))與被測物體(OBJECT)之間的距離(Radius1,Radius2,Radius3),然后利用三角知識(shí)計(jì)算被測物體的位置。一般來說,如果要計(jì)算被測物體的平面位置(即二維位置),那么需要測量三個(gè)非線性的距離數(shù)據(jù);同理,如果要計(jì)算被測物體的立體位置(即三維位置),那么需要測量四個(gè)非線性的距離數(shù)據(jù)。在具體的應(yīng)用環(huán)境下,需要測量的距離數(shù)據(jù)數(shù)目可能要少一些。例如,在Active Bat[2]定位系統(tǒng)中,參考點(diǎn)總是位于被測物體之上,所以只需要測量三個(gè)距離數(shù)據(jù)就可以確定Bat(被測物體)的三維位置。具體說來,距離測量的方法有三種:
?
(1)直接測量方法
這種方法通過物理動(dòng)作和移動(dòng)來測量參考點(diǎn)與被測物體之間的距離。例如,機(jī)器人移動(dòng)自己的探針,直到觸到障礙物,并把探針移動(dòng)的距離作為自己與障礙物之間的一個(gè)距離參數(shù)。
(2)傳播時(shí)間測量方法
在已知傳播速度的情況下,無線電波傳播的距離與它傳播的時(shí)間成正比。這種測量方法需要注意的問題有如下幾個(gè):
·無線電波的傳播特性。
因?yàn)闊o線電波在傳播的過程中可能會(huì)發(fā)生反射,而測量端無法區(qū)分直接到達(dá)的無線電波和經(jīng)過反射到達(dá)的無線電波,所以 容易造成測量的誤差。一般的解決方法是多測幾次,求出統(tǒng)計(jì)意義上的測量值。
·時(shí)鐘精度。
因?yàn)闊o線電波的傳播速度很快,所以為了減小測量誤差必須使用高精度的時(shí)鐘。
·時(shí)鐘同步。
參與同一個(gè)定位過程的參考點(diǎn)之間必須保證時(shí)鐘的同步,這樣才能保證測量結(jié)果的正確性和精度。如果由被測物體自己進(jìn)行測量,那么被測物體和參與同一個(gè)定位過程的參考點(diǎn)必須保證時(shí)鐘的同步;如果采用測量往返時(shí)間的方法,那么只要測量端保證足夠的時(shí)鐘精度即可。
(3)無線電波能量衰減測量方法
已知發(fā)射電波的強(qiáng)度,在接收方測量收到的電波強(qiáng)度,以此估計(jì)出發(fā)射電波物體距離接收方之間的距離。例如,在理想的傳播環(huán)境下,無線電波的衰減與1/r2成正比(其中r為傳播距離)。實(shí)際上,無線電波在空間傳播時(shí)能量的衰減是多種因素共同作用的結(jié)果,而不單單與傳播距離有關(guān)。具體說來,在一個(gè)地形地物較為復(fù)雜的環(huán)境中,無線電波信號(hào)傳播時(shí)的衰減會(huì)受到反射、折射、多徑效應(yīng)等多種因素的影響,所以這種利用能量衰減測量距離的方法不如傳播時(shí)間測量方法精度高。
2.1.2 基于角度測量的定位技術(shù)
基于角度的定位技術(shù)與基于距離測量的定位技術(shù)在原理上是相似的,兩者主要的不同在于前者測量的主要是角度,而后者測量的是距離。
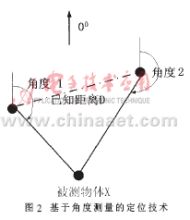
一般來說,如果要計(jì)算被測物體的平面位置(即二維位置),那么需要測量兩個(gè)角度和一個(gè)距離(虛線表示),如圖2所示。同理,如果要計(jì)算被測物體的立體位置(即三維位置),那么需要測量三個(gè)角度和一個(gè)距離。基于角度測量的定位技術(shù)需要使用方向性天線,如智能天線陣列。
?
2.2 基于場景分析的定位技術(shù)
這種定位技術(shù)對(duì)定位的特定環(huán)境進(jìn)行抽象和形式化,用一些具體的、量化的參數(shù)描述定位環(huán)境中的各個(gè)位置,并用一個(gè)數(shù)據(jù)庫把這些信息集成在一起。觀察者根據(jù)待定位物體所在位置的特征查詢數(shù)據(jù)庫,并根據(jù)特定的匹配規(guī)則確定物體的位置。
由此可以看出,這種定位技術(shù)的核心是位置特征數(shù)據(jù)庫和匹配規(guī)則,它本質(zhì)上是一種模式識(shí)別方法。Microsoft的RADAR[3]定位系統(tǒng)就是一個(gè)典型的基于場景分析的定位系統(tǒng)。
2.3 基于臨近關(guān)系的定位技術(shù)
基于臨近關(guān)系進(jìn)行定位的技術(shù)原理是:根據(jù)待定位物體與一個(gè)或多個(gè)已知位置的臨近關(guān)系來定位。這種定位技術(shù)通常需要標(biāo)識(shí)系統(tǒng)(Identification Systems)的輔助,以唯一的標(biāo)識(shí)來確定已知的各個(gè)位置。
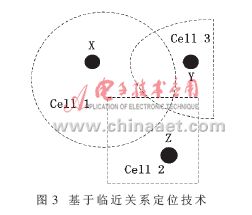
這種定位技術(shù)最常見的例子是移動(dòng)蜂窩通信網(wǎng)絡(luò)中的CellID,如圖3所示。圖中以黑點(diǎn)表示的是三個(gè)待定位物體,它們分別位于三不同形狀的Cell中。因?yàn)楦鱾€(gè)Cell的位置是已知的,所以待定位物體的位置也就可以確定了。
?
基于臨近關(guān)系定位技術(shù)的應(yīng)用非常廣泛,除了CellID以外,其他的例子還有Active Badge Location System[4]、Xerox ParcTAB System[5]、Carnegie Mellon Wireless Andrew等。
3 移動(dòng)通信中的定位技術(shù)
移動(dòng)通信中的定位技術(shù)通過對(duì)無線電波的一些參數(shù)進(jìn)行測量,根據(jù)特定的算法來判斷被測物體的位置。測量參數(shù)一般包括無線電波的傳輸時(shí)間、幅度、相位和到達(dá)角等。定位精度取決于測量的方法。以下介紹的幾種定位技術(shù)可以分別歸類到上面提到的三類定位技術(shù)中。
3.1 CellID-TA
這種定位技術(shù)是CellID的改進(jìn)。在移動(dòng)蜂窩通信網(wǎng)絡(luò)中,每個(gè)蜂窩小區(qū)都有一個(gè)惟一的CellID,利用移動(dòng)終端所在的CellID就可以粗略確定移動(dòng)終端的位置。CellID又被稱為小區(qū)全球識(shí)別碼(CGI),CGI由位置區(qū)識(shí)別碼(LAI)和小區(qū)識(shí)別碼(CI)構(gòu)成。
GSM系統(tǒng)中可以用作定位的另一個(gè)參數(shù)是時(shí)間提前量(TA)。TA是基站與移動(dòng)終端之間的傳輸時(shí)延,BTS(基站收發(fā)子系統(tǒng),Base station Transceiver Subsystem)通過測量TA可以估計(jì)與MS之間的距離。TA以比特為單位,1bit相當(dāng)于550米的距離。
由于無線傳輸存在多徑效應(yīng),因此單純利用TA定位的精度很低。把CellID和TA結(jié)合在一起是一種既簡單又經(jīng)濟(jì)的定位方法。
所有移動(dòng)終端都可以使用CellID-TA進(jìn)行定位,這是其一大優(yōu)點(diǎn)。但是這種定位技術(shù)的定位精度取決于小區(qū)的大小和周圍的環(huán)境,通常只能用于粗略定位。
3.2 UL-TOA和TDOA
??? UL-TOA(Uplink Time Of Arrival,上行鏈路到達(dá)時(shí)間)定位方法是由基站測量移動(dòng)終端信號(hào)到達(dá)的時(shí)間。該方法要求至少有三個(gè)基站參與測量,如圖4所示,每個(gè)基站增加一個(gè)位置測量單元LMU,LMU測量終端發(fā)出的接入突發(fā)脈沖或常規(guī)突發(fā)脈沖的到達(dá)時(shí)刻。LMU可以和BTS結(jié)合在一起,也可分開放置。由于每個(gè)BTS的地理位置是已知的,因此可以利用球面三角算出移動(dòng)終端的位置。TDOA(Time Difference Of Arrival)測量的是移動(dòng)終端發(fā)射的信號(hào)到達(dá)不同BTS的傳輸時(shí)間差,而不是單純的傳輸時(shí)間。
?

UL-TOA定位方法需要移動(dòng)終端和參與定位的LMU之間精確同步,而TDOA通常只需要參與定位的LMU之間同步即可。另外,這兩種定位方法還要求在所有基站上安裝監(jiān)測設(shè)備LMU,因此成本較高。
3.3? E-OTD
增強(qiáng)型觀察時(shí)間差E-OTD(Enhanced Observed Time Differential)在移動(dòng)通信網(wǎng)絡(luò)中的多個(gè)基站上放置位置接收器或參考點(diǎn),并把這些參考點(diǎn)作為位置測量單元(LMU)。每個(gè)參考點(diǎn)都有一個(gè)精確的定時(shí)源。當(dāng)具有E-OTD功能的移動(dòng)終端收到來自至少3個(gè)LMU的信號(hào)時(shí),每個(gè)LMU到達(dá)移動(dòng)終端的時(shí)間差就可以計(jì)算出來,利用這些時(shí)間差值產(chǎn)生的交叉雙曲線就可以估計(jì)出移動(dòng)終端的位置。
與E-OTD相關(guān)的基本量有三個(gè):觀察時(shí)間差OTD、真實(shí)時(shí)間差RTD和地理位置時(shí)間差GTD。OTD是移動(dòng)終端實(shí)際觀察到的兩個(gè)BTS信號(hào)到達(dá)的時(shí)間差;RTD是兩個(gè)BTS之間的系統(tǒng)時(shí)間差;GTD是兩個(gè)BTS到移動(dòng)終端由于距離差而引起的傳輸時(shí)間差。
設(shè)d1為BTS1與MS之間的距離,d2為BTS2與MS之間的距離,則GTD=|d2-d1|/v,公式中的v為無線電波的傳播速度。上述三個(gè)量之間關(guān)系為:OTD=RTD+GTD。當(dāng)BTS都同步時(shí),則RTD=0。
E-OTD要取得正確的定位結(jié)果,必須具備至少三個(gè)分別位于不同地理位置的BTS。另外,參與定位的BTS之間必須實(shí)現(xiàn)時(shí)鐘同步。最常用的同步方法是在BTS上安裝固定的GPS接收機(jī)。E-OTD還會(huì)受到市區(qū)中多徑效應(yīng)的影響。這時(shí),多徑效應(yīng)將扭曲信號(hào)的波形并加入延遲,導(dǎo)致E-OTD定位時(shí)的困難。
E-OTD方案可以提供比CellID高得多的定位精度——在50米到125米之間。但是它的定位響應(yīng)速度較慢,往往需要約5秒的時(shí)間。另外,它需要對(duì)移動(dòng)終端進(jìn)行改進(jìn),這意味著現(xiàn)存的移動(dòng)用戶無法通過該技術(shù)獲得基于位置的服務(wù)。
3.4 AOA
信號(hào)到達(dá)角(AOA,Angle Of Arrival)定位方法是由兩個(gè)或更多基站通過測量接收信號(hào)的到達(dá)角來估計(jì)移動(dòng)終端的位置,如圖5所示。AOA方法通常用來確定一個(gè)二維位置。
?
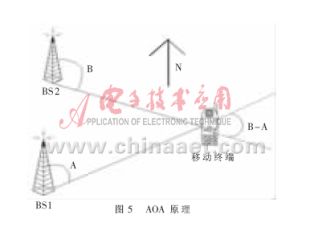
移動(dòng)終端發(fā),BTS1收,測量可得一條BTS1到移動(dòng)終端的連線;移動(dòng)終端發(fā),BTS2收,測量得到另一直線,兩直線相交產(chǎn)生定位角。BTS1和BTS2坐標(biāo)位置已知,以正北為參考方向,順時(shí)針為+0~+360度,逆時(shí)針為-0~-360度,由此可獲得以移動(dòng)終端、BTS1和BTS2為三點(diǎn)的三角關(guān)系。AOA方法在障礙物較少的地區(qū)可以獲得較高的定位精度,但在障礙物較多的環(huán)境中,由于無線傳輸存在多徑效應(yīng),則誤差增大。另外,AOA技術(shù)必需使用智能方向天線。
3.5 信號(hào)衰減(Signal Attenuation)
這種定位技術(shù)利用移動(dòng)終端靠近基站或遠(yuǎn)離基站時(shí)引起的信號(hào)衰減變化來估計(jì)移動(dòng)終端的位置,又被稱為場強(qiáng)定位技術(shù)。由于多數(shù)移動(dòng)終端的天線是多向發(fā)送的,因此信號(hào)功率會(huì)向所有方向迅速消散。如果移動(dòng)終端發(fā)出的信號(hào)功率已知,那么在另一點(diǎn)測量信號(hào)功率時(shí),就可以利用一定的傳播模型估計(jì)出移動(dòng)終端與該點(diǎn)之間的距離。
然而,測定對(duì)方的傳送功率是一項(xiàng)沉重的負(fù)擔(dān),由于小區(qū)基站的扇形特性、天線有可能傾斜以及無線系統(tǒng)的不斷調(diào)整,這個(gè)測定過程可能會(huì)十分復(fù)雜。而且,信號(hào)并不只因?yàn)閭鬏斁嚯x而產(chǎn)生衰減,其它因素(如穿越墻壁、植物、金屬、玻璃、車輛等)都會(huì)對(duì)信號(hào)功率產(chǎn)生影響。另外,功率測量電路無法區(qū)分多個(gè)方向接收到的功率,例如直接到達(dá)的信號(hào)功率和反射到達(dá)的信號(hào)功率。因此,根據(jù)信號(hào)衰減進(jìn)行定位被認(rèn)為是定位技術(shù)中最不可靠的一種。
4 移動(dòng)定位技術(shù)當(dāng)前的研究熱點(diǎn)
(1)提高移動(dòng)定位系統(tǒng)的定位精度和準(zhǔn)確度
移動(dòng)定位的定位精度和定位準(zhǔn)確度是衡量移動(dòng)定位系統(tǒng)性能的重要指標(biāo),因此在可接受的定位成本的條件下,如何提高定位系統(tǒng)的定位精度和定位準(zhǔn)確度是當(dāng)前的一個(gè)研究熱點(diǎn)。
(2)移動(dòng)定位信息的獲取和處理
移動(dòng)定位信息是基于位置的移動(dòng)應(yīng)用所必需的關(guān)鍵信息。不同的移動(dòng)應(yīng)用對(duì)定位信息的要求也是不同的。因此需要一個(gè)中間層對(duì)移動(dòng)定位系統(tǒng)收集的定位信息進(jìn)行進(jìn)一步的處理,以滿足移動(dòng)應(yīng)用對(duì)定位信息不同的要求。這里所說的中間層是一個(gè)中間件性質(zhì)的軟件實(shí)體,它的作用是屏蔽底層的具體的移動(dòng)定位技術(shù),向移動(dòng)應(yīng)用提供特定的定位服務(wù)。
(3)移動(dòng)定位應(yīng)用的研究
有了可以提供足夠定位精度和準(zhǔn)確度的定位技術(shù),以及對(duì)移動(dòng)定位信息進(jìn)行收集和處理的移動(dòng)定位中間件,應(yīng)用程序設(shè)計(jì)人員的任務(wù)就是設(shè)計(jì)新穎的移動(dòng)定位應(yīng)用,推動(dòng)移動(dòng)互聯(lián)網(wǎng)的發(fā)展。
?
參考文獻(xiàn)
1 Jeffrey Hightower,Gaetano Borriello. Location Systems for Ubiquitous Computing”,IEEE Computer, Aug, 2001, pp. 57~66
2 A. Harter et al., The Anatomy of a Context-Aware?Application, Proc. 5th Ann. Int'l Conf. Mobile Computing?and Networking (Mobicom 99), ACM Press, New York,?1999, pp. 59~68
3 P. Bahl and V. Padmanabhan.RADAR: An In-Building? RF-Based User Location and Tracking System, Proc.IEEE
? Infocom 2000, IEEE CS Press, Los Alamitos,Calif., 2000,?pp. 775~784
4 Roy Want, Andy Hopper, et al. The active badge location system. ACM Transactions on Information Systems,10(1):91-102, January 1992.
5 Roy Want, Bill Schilit, et al. The parctab ubiquitous?computing experiment. In Tomasz Imielinski, editor,Mobile?Computing, chapter 2,pages 45-101. Kluwer Publishing,?February 1997. ISBN 0-7923-9697-96