
基于AT91RM9200的CAN智能節(jié)點(diǎn)設(shè)計(jì)
現(xiàn)代電子技術(shù) 何炳林 張煥文 梁柱揚(yáng) 杜祺漳
摘要: 本文將提出一種基于ARM9處理器AT91RM9200和CAN控制器MCP25lO構(gòu)建的CAN智能節(jié)點(diǎn)的設(shè)計(jì)方案,并介紹了該方案的軟硬件設(shè)計(jì)及調(diào)試方法。
Abstract:
Key words :
近年來工業(yè)測控系統(tǒng)從傳統(tǒng)的集中測量控制系統(tǒng)轉(zhuǎn)向網(wǎng)絡(luò)化的集散控制系統(tǒng)。隨著現(xiàn)場總線技術(shù)高速發(fā)展和標(biāo)準(zhǔn)化程度的不斷提高,以現(xiàn)場總線技術(shù)為基礎(chǔ)的開放型集散測控系統(tǒng)得到廣泛應(yīng)用。總線是控制器局域網(wǎng)(controller area network,CAN)屬于現(xiàn)場總線范疇,是一種能有效支持分布式控制的串行通信網(wǎng)絡(luò),可將掛接在現(xiàn)場總線上作為網(wǎng)絡(luò)節(jié)點(diǎn)的智能設(shè)備連接成網(wǎng)絡(luò)系統(tǒng),并進(jìn)一步構(gòu)成集散測控系統(tǒng)。CAN智能節(jié)點(diǎn)位于傳感器和執(zhí)行機(jī)構(gòu)所在的現(xiàn)場,在集散控制系統(tǒng)中起著承上啟下的作用。一方面,它必須和上位機(jī)進(jìn)行通信,以完成數(shù)據(jù)交換;另一方面,它根據(jù)系統(tǒng)的需要以完成測量與控制的功能。因此,CAN智能節(jié)點(diǎn)的設(shè)計(jì)在工業(yè)集散測控系統(tǒng)中有著十分重要的作用。本文將提出一種基于ARM9處理器AT91RM9200和CAN控制器MCP25lO構(gòu)建的CAN智能節(jié)點(diǎn)的設(shè)計(jì)方案,并介紹了該方案的軟硬件設(shè)計(jì)及調(diào)試方法。
1 硬件設(shè)計(jì)
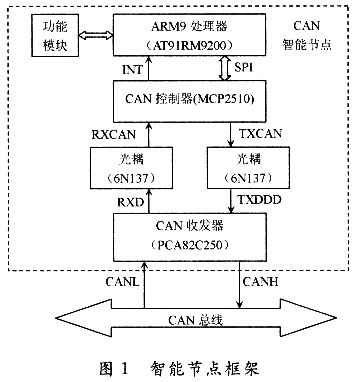
CAN智能節(jié)點(diǎn)的設(shè)計(jì)涉及2個方面:需要實(shí)現(xiàn)的功能;如何實(shí)現(xiàn)CAN通信。因此本文基于AT91RM9200和MCP2510提出的CAN智能節(jié)點(diǎn)的設(shè)計(jì)框架如圖1所示。在此首先介紹主要芯片的特性,然后再說明智能節(jié)點(diǎn)的設(shè)計(jì)原理。
1.1 芯片特性
AT91RM9200是Atmel公司生產(chǎn)的一款A(yù)RM9處理器,它是完全圍繞ARM920T ARM Thumb處理器構(gòu)建的系統(tǒng)。它有豐富的系統(tǒng)與應(yīng)用外設(shè)及標(biāo)準(zhǔn)的接口,從而為低功耗、低成本、高性能的計(jì)算機(jī)寬范圍應(yīng)用提供一個單片解決方案。
MCP2510是由美國微芯科技有限公司(MicrochipTechnology Inc.)生產(chǎn)的一款帶SPI接口的CAN協(xié)議控制器,完全支持CAN總線V2.0A/B技術(shù)規(guī)范;能夠發(fā)送和接收標(biāo)準(zhǔn)和擴(kuò)展報文,通信速率最高可達(dá)1 Mb/s,同時具備驗(yàn)收過濾以及報文管理功能;通過SPI接口與MCU進(jìn)行通信,最高數(shù)據(jù)傳輸速率高達(dá)5 Mb/s;包含3個發(fā)送緩沖器和2個接收緩沖器,還具有靈活的中斷管理能力。所有這些特點(diǎn)使得MCU對CAN總線的操作變得非常簡單。PCA82C250是由Philips半導(dǎo)體公司生產(chǎn)的一款CAN收發(fā)器,是CAN協(xié)議控制器和物理傳輸線路之間的接口。它可以用高達(dá)l Mb/s的位速率在2條有差動電壓的總線電纜上傳輸數(shù)據(jù)。
1.2 設(shè)計(jì)原理
本文將CAN智能節(jié)點(diǎn)需要實(shí)現(xiàn)的功能統(tǒng)稱為功能模塊。由于AT91RM9200處理器具有豐富的系統(tǒng)與應(yīng)用外設(shè)及標(biāo)準(zhǔn)的接口,因此根據(jù)應(yīng)用的需要很容易就可實(shí)現(xiàn)功能模塊的擴(kuò)展。本文著重說明AT91RM9200處理器如何實(shí)現(xiàn)CAN總線的擴(kuò)展。
AT91RM9200處理器提供4個SPI接口。其中MOSI(主機(jī)輸出從機(jī)輸入)、MISO(主機(jī)輸入從機(jī)輸出)、SPCK(串行時鐘)3個引腳信號由4個SPI接口共用;而4個片選信號NPCSO,NPCSl,NPCS2,NPCS3則用于分別選通4個SPI接口。而CAN控制器MCP2510的SPI接口引腳定義:SI(數(shù)據(jù)輸入)、SO(數(shù)據(jù)輸出)、SCK(時鐘輸入)、CS(片選輸入)。該設(shè)計(jì)將AT91RM9200第二個SPI接口與MCP2510的SPI接口相連(MOSI←→SI,MIS0←→SO,SPCK←→SCK,NPCSl←→CS),從而建立了它們之間通信的橋梁。同時將MCP2510芯片的中斷輸出引腳INT與AT91RM9200芯片的中斷輸入引腳IRQ5相連,從而可將MCP2510芯片產(chǎn)生的中斷(包括發(fā)送、接收、報文錯誤、總線活動喚醒、錯誤等中斷)事件通知AT91RM9200處理器,讓其作出相應(yīng)的處理。
CAN控制器MCP2510可以通過串行數(shù)據(jù)發(fā)送引腳(TXCAN)和串行數(shù)據(jù)接收引腳(RXCAN)直接連接到CAN收發(fā)器PCA82C250。該設(shè)計(jì)為了實(shí)現(xiàn)MC-P2510與PCA82C250之間的電流隔離,在它們之間放置了2個光耦。然而,在協(xié)議控制器和收發(fā)器之間使用光耦,通常會增加總線節(jié)點(diǎn)的循環(huán)延遲。光耦6N137的典型傳播延時為60 ns,比較適合傳輸速率小于等于125 Kb/s時的中低速應(yīng)用場合;而在傳輸速率在125 Kb/s~1 Mb/s的高速應(yīng)用場合中,應(yīng)考慮使用傳播延時小于40 ns的高速光耦,如HCPL-7101。
CAN收發(fā)器PCA82C250通過有差動發(fā)送和接收功能的2個總線終端CANH和CANL連接到總線電纜。PCA82C250的輸入引腳Rs通過外接電阻Rext到地,可以選擇3種不同的工作模式。第1種是高速模式,支持最大的總線速度和/或長度;第2種是斜率模式,其輸出轉(zhuǎn)換速度可故意降低以減少電磁輻射;第3種是準(zhǔn)備模式,其在電池供電并對功耗消耗非常低的應(yīng)用非常適合。該設(shè)計(jì)將PCA82C250的引腳RS外接阻值為47 kΩ的電阻,從而使它工作在斜率模式,這樣可以使用非屏蔽的總線電纜,降低系統(tǒng)的成本。但總線信號轉(zhuǎn)換速率被故意減低了,因此該設(shè)計(jì)只能應(yīng)用在傳輸速率小于等于125 Kb/s時的中低速應(yīng)用場合,相應(yīng)光耦選擇6N137即可。
2 軟件設(shè)計(jì)
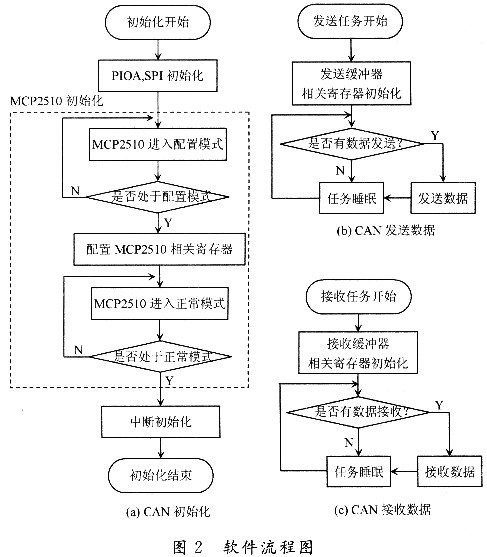
CAN智能節(jié)點(diǎn)軟件設(shè)計(jì)主要包括2個方面:CAN通信和CAN節(jié)點(diǎn)功能模塊的軟件設(shè)計(jì)。CAN節(jié)點(diǎn)功能模塊軟件的實(shí)現(xiàn)因需求而異,在此不做介紹。本文著重介紹CAN通信軟件的設(shè)計(jì),它主要由3部分組成:CAN初始化、CAN發(fā)送數(shù)據(jù)、CAN接收數(shù)據(jù)。
2.1 CAN初始化
由圖2(a)可知,CAN初始化主要包括PIOA端口初始化、SPI初始化、MCP2510初始化、中斷初始化。
現(xiàn)分別介紹如下:
(1)PIOA端口初始化。由于AT91RM9200每個引腳可配置為通用功能I/O線或與1個或2個外設(shè)I/O復(fù)用的I/O線。因此必須通過軟件配置PIOA端口:將PA0,PAl,PA2,PA4引腳分別定義為MISO,MOSI,SPCK,NPCSl,從而完成CAN智能節(jié)點(diǎn)SPI接口的定義;將PA3引腳定義為IRQ5,從而完成CAN智能節(jié)點(diǎn)中斷信號的定義。
(2)SPI初始化。通過PIOA端口初始化,只是完成SPI接口的引腳定義。為了使SPI接口能夠正常工作,首先配置電源管理控制器(PMC)以使能SPI時鐘;如果允許SPI中斷請求,必須對高級中斷控制器(AIC)進(jìn)行配置;最后通過SPI的模式寄存器SPI_MR。指定SPI為主機(jī)模式、固定外設(shè)選擇、SPI時鐘為MCK、片選信號NPCSl有效;通過SPI的片選1寄存器SPI_CSRl指定SPCK時鐘極性、時鐘相位以支持MCP2510的(O,O)或(1,1)的SPI模式,指定SPI接口以8位數(shù)據(jù)進(jìn)行傳輸匹配MCP2510的命令及數(shù)據(jù)格式,指定SPI的串行時鐘波特率以匹配與MCP2510的通信。
(3)MCP2510初始化。在完成PIOA端口、SPI初始化的基礎(chǔ)上,即可按照圖2(a)虛線框中的流程進(jìn)行MCP2510初始化:首先必須使MCP2510進(jìn)入配置模式;然后對MCP2510相關(guān)寄存器(位定時配置寄存器、接收濾波寄存器、接收屏蔽寄存器、引腳控制和狀態(tài)寄存器)進(jìn)行配置;最后使MCP2510進(jìn)入正常模式。根據(jù)MCP2510提供的SPI命令集(讀指令、寫指令、請求發(fā)送指令、狀態(tài)讀指令、位修改指令、復(fù)位指令),可以通過對AT91RM9200的SPI接收數(shù)據(jù)寄存器SPI_RDR,SPI發(fā)送數(shù)據(jù)寄存器SPI_TDR,SPI狀態(tài)寄存器SPI_SR的操作實(shí)現(xiàn)相應(yīng)的函數(shù):McpRdByte(),Mcp-WrByte(),WriteRTS(),McpRdStatus(),BitModify(),McpReset()。軟件通過這些基本的指令函數(shù)完成MCP2510相關(guān)寄存器的配置。
(4)中斷初始化。通過AT91RM9200的高級中斷控制器(AIC),首先配置IRQ5中斷的優(yōu)先級為最高,中斷觸發(fā)類型為下降沿觸發(fā);接著將中斷服務(wù)程序IRQ5_ISR()的地址設(shè)置到中斷向量寄存器;最后使能IRQ5中斷。
2.2 CAN發(fā)送數(shù)據(jù)
當(dāng)完成CAN的初始化后,即可使用3個發(fā)送緩沖器發(fā)送報文數(shù)據(jù)。由圖2(b)可知:在發(fā)送數(shù)據(jù)前,首先通過發(fā)送緩沖器N(N=O,1,2)控制寄存器TXBNCTRL終止報文發(fā)送,并設(shè)定發(fā)送緩沖器N報文發(fā)送的優(yōu)先級;接著通過發(fā)送緩沖器N標(biāo)準(zhǔn)標(biāo)識符高低位寄存器TXBNSIDH,TXBNSIDL設(shè)定標(biāo)準(zhǔn)標(biāo)識符,如果報文采用擴(kuò)展標(biāo)識符,還需通過發(fā)送緩沖器N擴(kuò)展標(biāo)識符高低位寄存器TXBNEID8,TXBNEID0設(shè)定擴(kuò)展標(biāo)識符。當(dāng)發(fā)送緩沖器N相關(guān)寄存器初始化后,發(fā)送任務(wù)處于休眠等待狀態(tài)。一旦有數(shù)據(jù)需要發(fā)送,即可將需要發(fā)送的數(shù)據(jù)(每次最多8 B)存放在發(fā)送緩沖器N的數(shù)據(jù)寄存器TXBND7~TXlBND0,并且通過送緩沖器N的數(shù)據(jù)長度寄存器TXBNDLC設(shè)定每次發(fā)送的字節(jié)數(shù),最后通過發(fā)送緩沖器N控制寄存器TXB-NCTRL啟動數(shù)據(jù)發(fā)送。當(dāng)數(shù)據(jù)發(fā)送完畢,發(fā)送任務(wù)又處于休眠等待狀態(tài)。
2.3 CAN接收數(shù)據(jù)
當(dāng)完成CAN的初始化后,即可使用兩個接收緩沖器接收報文數(shù)據(jù)。由圖2(c)可知:在接收數(shù)據(jù)前,首先通過接收緩沖器N(N=0,1)控制寄存器RXBNCTRL,設(shè)定接收緩沖器的工作模式為接收符合濾波條件的所有帶擴(kuò)展標(biāo)識符或標(biāo)準(zhǔn)標(biāo)識符的有效報文;如果允許MCP2510接收中斷,還需通過中斷使能寄存器CANINTE允許接收緩沖器N裝入報文時產(chǎn)生中斷。
當(dāng)接收緩沖器N相關(guān)寄存器初始化后,接收任務(wù)處于休眠等待狀態(tài)。當(dāng)接收任務(wù)通過輪詢或中斷方法發(fā)現(xiàn)需要接收數(shù)據(jù)時,它通過接收緩沖器N標(biāo)準(zhǔn)標(biāo)識符高低位寄存器RXBNSIDH,RXBNSIDL獲取標(biāo)準(zhǔn)標(biāo)識符;如果收到的報文是擴(kuò)展幀,可通過RXBNSIDL及接收緩沖器N擴(kuò)展標(biāo)識符中間、低位寄存器RXBNEID8,RXBNEIDO獲取擴(kuò)展標(biāo)識符;通過接收緩沖器N數(shù)據(jù)長度碼寄存器RXBNDLC獲取接收到的數(shù)據(jù)字節(jié)個數(shù),進(jìn)而通過接收緩沖器N數(shù)據(jù)寄存器RBNDm7~RBNDm0獲取接收報文中的數(shù)據(jù)信息。當(dāng)數(shù)據(jù)接收完畢,接收任務(wù)又處于休眠等待狀態(tài)。
3 軟硬件調(diào)試
當(dāng)CAN智能節(jié)點(diǎn)的硬件和軟件設(shè)計(jì)完畢,需要對其進(jìn)行軟、硬件的調(diào)試以驗(yàn)證其設(shè)計(jì)的正確性。CAN智能節(jié)點(diǎn)軟、硬件調(diào)試按以下步驟依次進(jìn)行:
(1)CAN自發(fā)、自收功能調(diào)試。只要在CAN初始化過程完成MCP2510相關(guān)寄存器的配置,將MCP2510設(shè)置為環(huán)回模式,即可使MCP2510器件內(nèi)部發(fā)送緩沖器和接收緩沖器之間進(jìn)行報文自發(fā)、自收,而無需通過CAN總線。
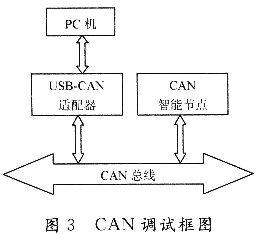
(2)CAN通信功能調(diào)試。按照圖3所示方案進(jìn)行CAN通信功能的調(diào)試。其中USB_CAN適配器采用武漢吉陽光電科技有限公司一款帶有USB接口和1路CAN接口的GY8507 USB_CAN總線適配器。通過該適配器,PC可以通過USB接口連接一個標(biāo)準(zhǔn)CAN網(wǎng)絡(luò),從而與CAN智能節(jié)點(diǎn)通信。使用廠家提供的CANTools工具軟件可以方便進(jìn)行CAN智能節(jié)點(diǎn)數(shù)據(jù)的發(fā)送和接收調(diào)試。
(3)CAN功能模塊調(diào)試。由于CAN智能節(jié)點(diǎn)具體實(shí)現(xiàn)的功能各異,不詳細(xì)介紹CAN功能模塊的調(diào)試。
4 結(jié)語
目前已完成CAN智能節(jié)點(diǎn)通信電路的軟、硬件設(shè)計(jì)及調(diào)試,并成功將軟件移植到VxWorks 5.5操作系統(tǒng)上運(yùn)行。基于功能強(qiáng)大的AT91RM-9200處理器以及高可靠和強(qiáng)實(shí)時的VxWorks 5.5操作系統(tǒng),容易構(gòu)建出滿足應(yīng)用需求的CAN智能節(jié)點(diǎn)。
此內(nèi)容為AET網(wǎng)站原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。