
0 引言
在單片機應(yīng)用系統(tǒng)中,串行數(shù)據(jù)通信通常采用芯片">8251,但因8251的通信波特率不高,不能應(yīng)用于晶振較高的系統(tǒng),這就使得要求高運行速度、高速收發(fā)數(shù)據(jù)的系統(tǒng)無法應(yīng)用">8251芯片收發(fā)數(shù)據(jù),而且8251需要有MAX3100支持高速通信,最高通信波特率可達230KBPS,低功耗,支持低電壓,設(shè)計后系統(tǒng)體積小,比采用外部時鐘8253">8253提供外部時鐘信號。MAXIM公司推出的新型UART芯片MAX3100
正好填補了這個空白。MAX3100支持高速通信,最高通信波特率可達230KBPS,低功耗,支持低電壓,設(shè)計后系統(tǒng)體積小,比采用外部時鐘8253設(shè)計的印制版尺寸的一半還小。而且能夠使軟件設(shè)計實現(xiàn)起來更可靠。
有機發(fā)光顯示OLED是比液晶顯示技術(shù)更為先進的新一代平板顯示技術(shù),是被業(yè)界公認為最具發(fā)展前景的下一代顯示技術(shù)。有機發(fā)光顯示 OLED(Organic Light Emitting Display)與液晶顯示技術(shù)相比,具有超輕薄、高亮度、廣視角、自發(fā)光、響應(yīng)速度快、適應(yīng)溫度范圍寬、抗震強、功耗低、可實現(xiàn)柔軟顯示等優(yōu)越性能,因此OLED屏正快速擴大其在便攜式電子產(chǎn)品市場上的應(yīng)用份額,能夠應(yīng)用于通訊、測繪、鐵路以及兵器等野外惡劣環(huán)境。
1 主要工作原理
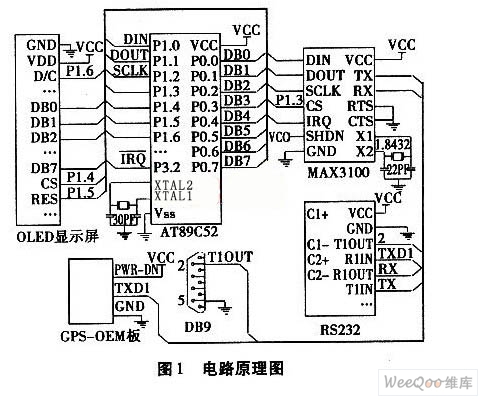
系統(tǒng)主要由AT89C52單片機、MAX3100通用異步收發(fā)器、GPS-OEM板、OLED顯示屏等組成。AT89C52單片機通過 MAX3100接收GPS-OEM板發(fā)出的NEMA語句,經(jīng)過軟件編程計算出定位信息(包括:緯度、經(jīng)度、高度、速度、日期、時間、航向、衛(wèi)星狀況等) 后,在OLED顯示屏上顯示出來。并且通過MAX3100將這些定位信息以RS232標(biāo)準(zhǔn)串口數(shù)據(jù)輸出。系統(tǒng)電路原理圖如圖1所示。
2 單片機與GPS-OEM板之間的數(shù)據(jù)通信
單片機與GPS-OEM板之間的數(shù)據(jù)通信,是通過MAX3100通用異步收發(fā)器來實現(xiàn)的,其中單片機震蕩頻率選用11.0592MHz。首先用 MAX232電平轉(zhuǎn)換芯片,來實現(xiàn)RS232電平與TTL電平的雙向轉(zhuǎn)換,因為GPS OEM板的串口電平是符合RS232標(biāo)準(zhǔn)的電平,而MAX3100采用的是TTL電平。
MAX3100的DIN引腳為串行數(shù)據(jù)輸入端,DOUT為串行數(shù)據(jù)輸出端,串行時鐘的上升沿鎖存DIN數(shù)據(jù),DOUT數(shù)據(jù)由串行時鐘的下降沿同步輸出。 MAX3100的DIN和DOUT引腳的串行數(shù)據(jù)序列都是16位數(shù)據(jù),其中DIN數(shù)據(jù)序列的前兩位表征串的數(shù)據(jù)類型。當(dāng)前兩位是“1,1”時,表示寫命令,當(dāng)前兩位是“0,0”時,表示讀數(shù)據(jù),當(dāng)前兩位是“1,0”時,表示寫數(shù)據(jù)。
對MAX3100進行初始化配置,是單片機通過寫命令序列來完成的。該命令序列包括奇偶校驗位、數(shù)據(jù)位、停止位、波特率設(shè)置、數(shù)據(jù)字長度、校驗 FIFO、中斷使能等信息。MAX3100具有自己的波特率發(fā)生器,其振蕩器可以用頻率為1.843 2 MHZ或3.6864 MHZ的晶振。波特率由寫命令序列的后4位B0~B3位決定的。
當(dāng)單片機接收GPS OEM板的串口數(shù)據(jù)時,是通過讀MAX3100數(shù)據(jù)序列來完成的,單片機從MAX3100讀出數(shù)據(jù)時,需要在DIN寫入一個16位的字(0000H),再從DOUT讀入16位的字,其中的高八位是:接收/發(fā)送緩沖區(qū)的狀態(tài),數(shù)據(jù)錯/溢出狀態(tài),接收/校驗位狀態(tài)和CTS的狀態(tài),低八位才是接收到的GPS OEM板的串口數(shù)據(jù)。
當(dāng)單片機發(fā)送最終的定位數(shù)據(jù)時,是通過向MAX3100寫入數(shù)據(jù)序列來完成的,單片機向MAX3100寫入數(shù)據(jù)時,在DIN寫入的是一個16位的字,其中高八位設(shè)置的內(nèi)容是:寫入標(biāo)志、允許TX輸出、RTS引腳設(shè)定以及傳送校驗位設(shè)定。低八位才是要傳送的數(shù)據(jù)。
3 OLED顯示屏顯示定位信息
顯示模塊顯示屏為128列、64行,有1片行驅(qū)動器和2片列驅(qū)動器,其中行驅(qū)動器有64行輸出,每片列驅(qū)動器有64路輸出。只要提供電源就能產(chǎn)生驅(qū)動信號和同步信號,模塊的外部信號僅與列驅(qū)動器有關(guān)。列驅(qū)動器內(nèi)置64×64位顯示存儲器,顯示屏上各像素點顯示狀態(tài)與顯示存儲器各位數(shù)據(jù)一一對應(yīng),顯示存儲器的數(shù)據(jù)直接作為圖形顯示的驅(qū)動信號,為“1”的時候顯示,為“O”的時候不顯示。系統(tǒng)中OLED顯示屏顯示緯度、經(jīng)度、高度、速度、日期、時間、航向、衛(wèi)星狀況等定位信息。
4 軟件設(shè)計
4.1 看門狗中斷的應(yīng)用
MAX706的6腳與7腳分別與AT89C52的P1.7與復(fù)位腳相連,在軟件程序中,每隔一段程序插入一個看門狗計數(shù)器復(fù)位指令,這樣,在程序運行過程中,如果進入死循環(huán)或非法代碼區(qū),就會使系統(tǒng)復(fù)位,保證系統(tǒng)正常運行。
4.2 延時處理
將所要發(fā)送的數(shù)據(jù)送入發(fā)送緩沖器時,由于MAX3100要等T=1時,發(fā)送緩沖器為空,才可以接收另一個需發(fā)送的數(shù)據(jù),所以此時加入合適的延時,是非常必要的,可以保證所發(fā)數(shù)據(jù)準(zhǔn)確無誤。
4.3 建立字庫
在實現(xiàn)OLED顯示時,先將需要顯示的漢字組成一個漢字庫,英文字符或阿拉伯?dāng)?shù)字組成一個西文字庫。
如漢字“效”字,設(shè)置宋體12號,對應(yīng)的點陣為寬×高=16×16,用取模軟件橫向取模對應(yīng)的32字節(jié)為: {O×10,0×20,0×08,0×30,O×08,0×20,0×7F,O×20,0×14,0×7E,0×12,0×44,0×21,0×C4,O×22,0×44,O×62,0×28,O x 14,0×28,O×08,0×10,0×0C,0×10,O×12,0×28,0×20,0×CE,0×C3,0×04,O×00,0×00}。
阿拉伯?dāng)?shù)字“1”,設(shè)置宋體12號,對應(yīng)的點陣為寬×高=8×16,用取模軟件橫向取模對應(yīng)的16字節(jié)為:{0×00,0 x0o,0×00,0×10,0×70,0×10,0×10,O×10,0×10,0×10,0×10,O×10,0×10,0×7C,O×00,O×00}。
4.4 軟件要點設(shè)計
軟件設(shè)計的時候,有兩部分關(guān)鍵設(shè)計,一是對串口接收到的GPS模塊數(shù)據(jù)進行處理;二是將所需的定位信息在OLED顯示屏上顯示出來。軟件流程圖如圖2所示。
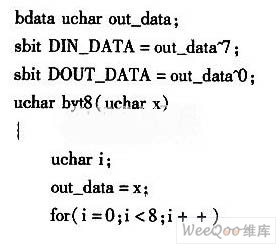
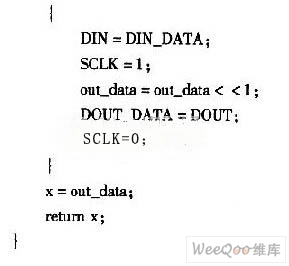
在MAX3100中定義一個8位移位的子程序,C語言代碼如下:
這個子程序的任務(wù)就是通過對MAX3100的DIN和DOUT引腳進行8次移位操作,來完成兩個任務(wù),首先是接收部分,通過初始化配置后,經(jīng)過 RX接收GPS模塊的NEMA語句,送入接收緩沖區(qū)。接下來是發(fā)送部分,接收SPI數(shù)據(jù)并進行發(fā)送緩沖,通過TX按異步串行發(fā)送出去。
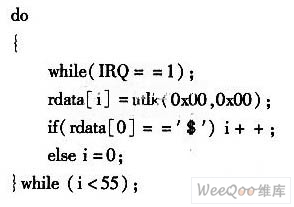
接收NEMA語句時首先從行首標(biāo)志“$”開始,在沒有進一步處理之前,NEMA語句是一長串字節(jié)流,這些信息在經(jīng)過分類提取之前是無法加以利用的,因此,必須通過軟件程序?qū)⒏鱾€字段的信息從字節(jié)流中提取出來,將其轉(zhuǎn)化成緯度、經(jīng)度、高度、速度、日期、時間、航向、衛(wèi)星狀況等定位信息。
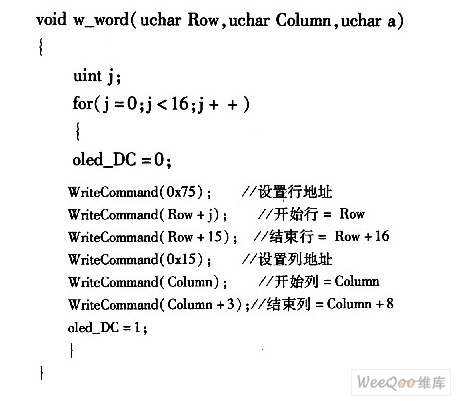
在OLED顯示屏上某一位置顯示某一定位信息,是通過軟件設(shè)置來完成的,其中Row代表所要顯示位置的開始行,Column代表所要顯示位置的開始列,a代表在已經(jīng)建立的漢字庫和西文字庫中的序列號,C語言代碼如下:
5 結(jié)束語
本系統(tǒng)結(jié)合MAX3100高效的異步收發(fā)通信優(yōu)點,吸取了其功耗低、體積小、傳輸快以及OLED顯示屏超輕薄、高亮度、廣視角、自發(fā)光、響應(yīng)速度快、適應(yīng)溫度范圍寬、抗震強、功耗低等優(yōu)點。設(shè)計開發(fā)出由電池供電的便攜式GPS定位系統(tǒng),已經(jīng)成功應(yīng)用到產(chǎn)品中,取得很好的效果。