在車載衛(wèi)星通信中,由于低輪廓車載天線具有良好的隱蔽性和使用性,應用前景較為廣泛。但要實現性價比達到最優(yōu),天線跟蹤控制器的設計是關鍵技術之一。在脫離航向引導信息的情況下,要實現車載天線穩(wěn)定跟蹤的控制系統(tǒng)難度較大,提出一種新的跟蹤控制策略,使這一問題得到解決。
1 系統(tǒng)組成
天線穩(wěn)定跟蹤控制系統(tǒng)主要由跟蹤接收器、控制器、驅動器以及慣性器件組成。跟蹤接收器主要提供衛(wèi)星信標的AGC電平值;控制器主要提供操作和顯示接口以及完成控制策略的實施;驅動器主要完成功率放大和控制電機的旋轉;軸角編碼器主要提供天線方位及俯仰的實時角度;慣性器件主要提供天線載體的擾動信息。天線控制系統(tǒng)組成如圖1所示。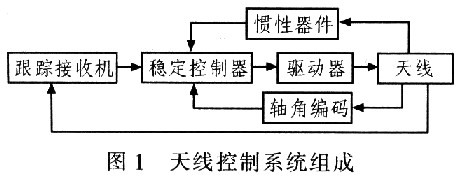
2 跟蹤控制策略
這里所討論的天線系統(tǒng)是方位和俯仰波束寬度不對稱的車載平板天線,俯仰軸的波束寬度較寬,采用了電掃描的方式,同時輔以傾角儀定位和陀螺穩(wěn)定補償,實現了俯仰的穩(wěn)定跟蹤,而方位波束寬度較窄,所以跟蹤控制策略主要針對方位進行。
車載天線控制系統(tǒng)具有在抗載體擾動的穩(wěn)定措施、航向解算的能力才能實現對衛(wèi)星目標的快速捕獲和準確跟蹤。在穩(wěn)定措施實現上,本文采取了前饋穩(wěn)定技術,利用安裝在車體上的速率陀螺提供的載體姿態(tài)信息,解算出補償信號進行開環(huán)補償;航向信息的解算是以天線捕捉到的跟蹤接收機的AGC最大值點位置為相對航向初始點,利用速率陀螺積分得到航向的偏移量對方位進行動態(tài)實時修正。
2.1 控制環(huán)路設計
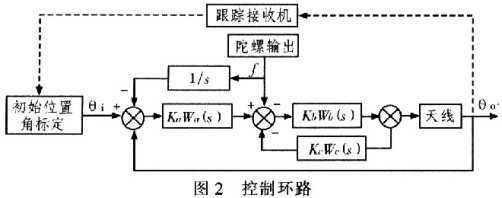
系統(tǒng)以跟蹤接收機所捕捉到的AGC的最大點的方位相對角度值做為初始位置,采用安裝在車體3個正交方向上的速率陀螺提供的數據,通過坐標變換,解算出車體擾動所產生的天線方位和俯仰的擾動分量,對天線進行穩(wěn)定控制,同時將陀螺的輸出量進行積分得到位置偏移量,然后用位置環(huán)再對位置進行補償。控制環(huán)路如圖2 所示。圖2中,θi為目標角位置;θo為天線角位置;KaWa(s)為位置環(huán)放大校正環(huán)節(jié)傳遞函數;KbWb(s)為速度環(huán)放大校正環(huán)節(jié)傳遞函數;KcWc(s)為速度反饋校正環(huán)節(jié)傳遞函數;f為方位陀螺輸出。
2.2 跟蹤策略
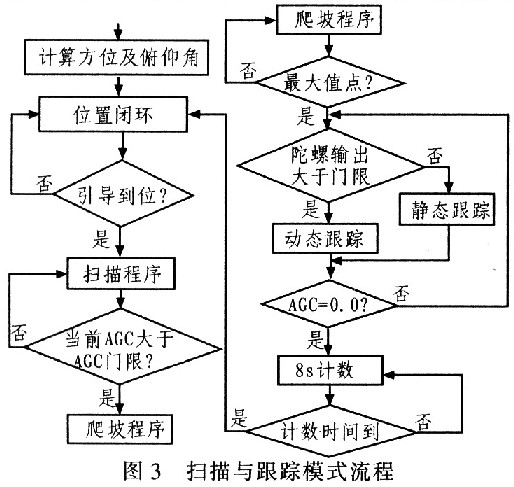
掃描與跟蹤是本系統(tǒng)技術實現的核心部分,當目標衛(wèi)星設定后,通過天線當前經緯度和目標星的經度可計算出天線方位和俯仰的目標角,根據目標角將天線引導到位,以當前位置為中心點進行方位掃描,同時俯仰進行電掃描,直至AGC大于AGC門限。當天線AGC大于AGC門限時將航向置為零,同時采樣方位陀螺速度 Vf并進行積分得到車體航向的變化θf。將該角度疊加到步進跟蹤的命令角θi,作為新的命令角進行爬坡找最大值。當找到最大值后將航向重新置為零。進入跟蹤狀態(tài),同時啟動陀螺輸出積分θf,積分迭代

式中,θf(n)為積分輸出;θf(n-1)為上次積分輸出;Vf(n)為陀螺輸出;Vf(n-1)為上次陀螺輸出。
跟蹤狀態(tài)分為動態(tài)跟蹤(轉彎行駛)和靜態(tài)跟蹤(直線行駛),當方位陀螺值大于臨界值時進行動態(tài)跟蹤否則進入靜態(tài)跟蹤。動態(tài)跟蹤:當方位陀螺輸出值大于臨界值Vfo時,角命令以當前角加上實時θf為命令角做位置閉環(huán),同時輔以速度補償。靜態(tài)跟蹤:以AGC最大點為中心,方位機械上輕微地向左和向右方向轉動天線平臺一定角度△θ±θf,得到2個AGC:VAGC_l和VAGC_r。當VAGC_l=VAGC_r,則對準目標;當VAGC _l>VAGC_r,則目標偏左,方位向左轉動△θ±θf角度;當VAGC_l
3 設計應用及試驗結果
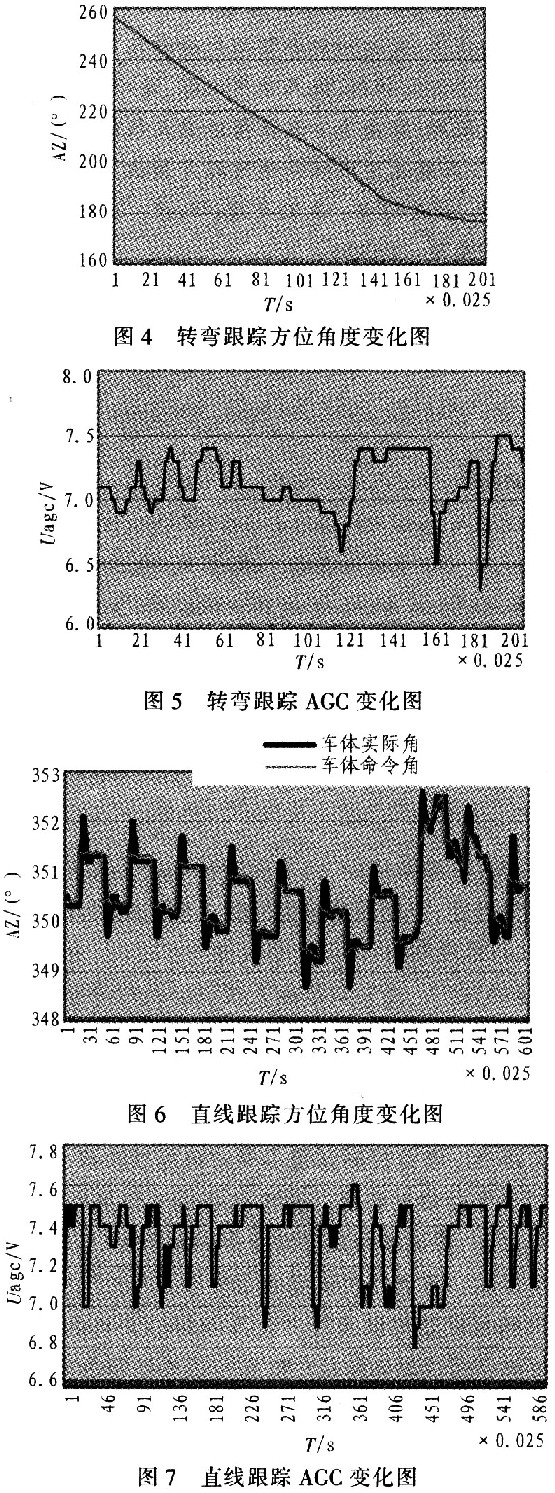
在某車載平板“動中通”天線控制系統(tǒng)中采用上述設計方法。經測試在直路跟蹤精度為0.24 V。轉彎跟蹤精度為0.35 V。精度計算公式詳見文獻。轉彎跟蹤測試結果如圖4和圖5所示。而直路跟蹤測試結果如圖6和圖7所示。
4 結束語
本文所描述的控制策略,使用傾角儀和3個速率陀螺通過軟件實現了車體擾動的隔離以及航向隔離,提高了車載衛(wèi)星通信天線的性價比。通過對該跟蹤算法的測試結果可知,該算法能夠滿足精度要求,可以用來作為低輪廓車載天線的跟蹤策略,推廣使用。