
引言
近年來,隨著汽車工業(yè)和電子工業(yè)的不斷發(fā)展,汽車線控轉(zhuǎn)向技術(shù)成為了研究的熱點,并提出了包括路感模擬、轉(zhuǎn)向穩(wěn)定性以及總線技術(shù)等諸多關(guān)鍵性問題并加以研究。其中的總線技術(shù),已經(jīng)得到了眾多知名汽車公司的積極研究與應(yīng)用。一些汽車制造商目前計劃采用FlexRay總線,這是一種特別適合下一代汽車應(yīng)用的網(wǎng)絡(luò)通信總線,具有容錯功能和確定的消息傳輸時間,能夠滿足汽車控制系統(tǒng)的高速率通信要求。
FlexRaY是時間觸發(fā)的通信總線,對實時性要求較高,因此僅僅依靠由簡單循環(huán)和中斷服務(wù)程序組成的嵌入式程序?qū)o法滿足要求。同時,F(xiàn)lexRay通信在啟動和運行過程中,需要利用循環(huán)對總線狀態(tài)進行查詢,既浪費大量的系統(tǒng)資源,又容易造成程序死鎖,成為應(yīng)用中的難點問題。
基于上述問題,本文基于μC/OS-Ⅱ操作系統(tǒng),設(shè)計了線控轉(zhuǎn)向中FlexRay總線的通信部分。在滿足實時性要求的基礎(chǔ)上,利用其多任務(wù)的特點,節(jié)約了系統(tǒng)資源,避免了死鎖問題的出現(xiàn),并增加了通信故障檢測報警功能,為今后開發(fā)線控轉(zhuǎn)向系統(tǒng)奠定了基礎(chǔ)。
1 FlexRay總線技術(shù)
為了滿足汽車線控技術(shù)的需求,F(xiàn)lexRay聯(lián)盟于2005年發(fā)布了FlexRay總線協(xié)議。其主要特點有:雙通道傳輸,每個通道的傳輸速率高達(dá)10 Mb/s;具有靈活的使用方式,支持多種網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu);負(fù)載率高;提供冗余機制。
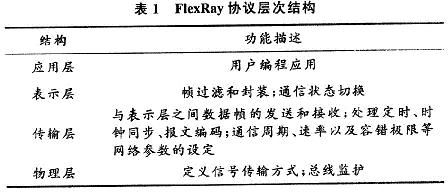
從開放式系統(tǒng)互連參考模型角度來看,F(xiàn)lexRay通信協(xié)議定義了四層結(jié)構(gòu):物理層、傳輸層、表示層和應(yīng)用層,各層功能描述見表1。表示層中,通信狀態(tài)切換控制整個FlexRay通信的運行過程,具有十分重要的作用。
FlexRay協(xié)議操作控制(Proposal Operation Control,POC)將通信狀態(tài)分為幾種狀態(tài),分別為:配置狀態(tài)(默認(rèn)配置、配置);就緒狀態(tài);喚醒狀態(tài);啟動狀態(tài);正常狀態(tài)(正常主動、正常被動);暫停狀態(tài)。其狀態(tài)轉(zhuǎn)換圖如圖1所示。當(dāng)控制器主機接口(Controller Host InteRFace,CHI)給通訊控制器(CC)發(fā)送命令后,CC從暫停狀態(tài)進入默認(rèn)配置狀態(tài),滿足配置條件后進入配置狀態(tài),完成網(wǎng)絡(luò)初始化和節(jié)點通信任務(wù)初始化;之后可以進入就緒狀態(tài),完成節(jié)點內(nèi)部通信設(shè)置,如果沒有滿足通信就緒條件,就返回配置狀態(tài)繼續(xù)配置;在就緒狀態(tài),CC可以發(fā)送喚醒幀,喚醒網(wǎng)絡(luò)中沒有在通信的節(jié)點,也可以獲得CPU的啟動通信命令,完成與FlexRay網(wǎng)絡(luò)時鐘同步;啟動成功后進入正常狀態(tài),完成數(shù)據(jù)的收發(fā);當(dāng)出現(xiàn)錯誤時,可由正常狀態(tài)進入暫停狀態(tài),重新等待CHI命令。

由此可見,控制器需要按照POC狀態(tài)進行相應(yīng)操作,因此會出現(xiàn)對POC狀態(tài)的循環(huán)檢測,容易造成程序死鎖以及占用大量系統(tǒng)資源。按照操作系統(tǒng)的介紹,其任務(wù)是以循環(huán)的形式存在的,因此可以將檢測POC狀態(tài)放入任務(wù)中單獨執(zhí)行,通過操作系統(tǒng)進行任務(wù)調(diào)度,可以避免影響到其他任務(wù)中程序的運行,并且提高程序的執(zhí)行效率。
2 基于MC9S12XF512的μC/OS-Ⅱ移植
μC/OS-Ⅱ是源碼公開的操作系統(tǒng),具有執(zhí)行效率高、占用空間小和實時性能優(yōu)良等特點。利用該操作系統(tǒng)的任務(wù)機制,設(shè)計實現(xiàn)Flex-Ray協(xié)議,可以大大提高系統(tǒng)的實時性和穩(wěn)定性,并且可以避免檢測POC狀態(tài)時的死鎖現(xiàn)象。
目前市場上支持FlexRay通信的單片機較少,只有Freescale公司的技術(shù)比較成熟。考慮到成本問題,選擇16位單片機MC9S12XF512作為系統(tǒng)控制器芯片。操作系統(tǒng)的使用首先要解決的就是移植問題。根據(jù)μC/OS-Ⅱ的文件結(jié)構(gòu),移植時需要對OS_CPU.H,(OS_CPU_A.ASM和OS_CPUC.C三個文件進行修改,以適合MC9S12xF512芯片的需要。
2.1 修改OS_CPU.H文件
OS_CPU.H文件定義與CPU相關(guān)的硬件信息,包括各種數(shù)據(jù)類型對應(yīng)的存儲長度等。針對MC9S12xF512中的堆棧是由高地址向低地址增長的,所以常量OS_STK_GROWTH必須設(shè)置為1。同時,定義任務(wù)調(diào)度函數(shù)OS_TASK_SW()設(shè)置為軟中斷源。
2.2 修改OS_CPU_A.ASM文件
OS_CPU_A.ASM文件是使用匯編語言編寫與任務(wù)調(diào)度部分有關(guān)的代碼。包括任務(wù)級任務(wù)切換函數(shù)OSCtxSw()、中斷級任務(wù)切換函數(shù)OSIntCtxSw()、以及讓優(yōu)先級最高的就緒態(tài)任務(wù)開始運行的函數(shù)OS-StartHighRdy()。
MC9S12XF512芯片不僅設(shè)有FLASH頁面管理寄存器PPage,也有RAM頁面管理寄存器RPage、E2PROM頁面管理寄存器EPage以及全程寄存器GPage。當(dāng)時鐘節(jié)拍中斷發(fā)生時,芯片會自動把CPU寄存器推入堆棧,但是并不包括上述各寄存器,因此在OS_CPU_A.ASM文件三個函數(shù)中,均需要加入將寄存器入棧和出棧的語句。由于篇幅有限,僅以PPage代碼為例:

寄存器的入棧必須按照GPage,EPage,RPage,PPage的順序,出棧則相反。
2.3 修改OS_CPUC.C文件
OS_CPUC.C文件是使用C語言編寫與任務(wù)調(diào)度部分有關(guān)的代碼,包括任務(wù)堆棧初始化函數(shù)OSTaskStklnit()和時鐘節(jié)拍中斷服務(wù)子程序OSTicklSR()。
2.3.1 修改任務(wù)堆棧初始化函數(shù)0STaskStkInit()
由于μC/OS-Ⅱ是利用中斷方式來實現(xiàn)任務(wù)調(diào)度的,因此需要使用函數(shù)OSTaskStklnit()來模擬發(fā)生一次中斷后的堆棧結(jié)構(gòu),按照中斷后的進棧次序預(yù)留各個寄存器存儲空間,而中斷返回地址指向任務(wù)代碼的起始地址。編寫時需要根據(jù)芯片的中斷后,X,Y,A,B,SP等寄存器入棧順序來進行代碼編寫。首先在例程OSTaskStkInit()函數(shù)處設(shè)置斷點,然后單步執(zhí)行程序,觀察X,Y,A,B,SP等寄存器狀態(tài)是否與程序編寫的存儲值對應(yīng)。發(fā)現(xiàn)對應(yīng)于堆棧指針SP值的存儲區(qū)地址是模擬中斷時進棧的存儲地址,而其中保存任務(wù)程序指針地址的內(nèi)容是錯誤的,即不是任務(wù)的指針地址,因此每次在需要調(diào)用任務(wù)執(zhí)行時都進入了錯誤的地址進行執(zhí)行,并沒有找到任務(wù)的代碼。通過單步執(zhí)行OSTaskStkI-nit()函數(shù),可以發(fā)現(xiàn)原程序在存儲任務(wù)代碼指針PC值時,只存儲了PC指針的高8位,但后8位未存,導(dǎo)致指針指向錯誤。因此修改程序為:
*--wstk=(INTl6U)((INT32U)task);
2.3.2 修改時鐘節(jié)拍中斷服務(wù)子程序OSTickISR()
時鐘節(jié)拍中斷服務(wù)子程序OSTickISR()負(fù)責(zé)處理所有與定時相關(guān)的工作,如任務(wù)的延時、等待操作等。在時鐘中斷中將查詢處于等待狀態(tài)的任務(wù),判斷是否延時結(jié)束,否則將重新進行任務(wù)調(diào)度。可以通過調(diào)用OSIntEnter()。OS_SAVE_SP(),OSTimeTick()和OSIntExit()四個函數(shù)進行實現(xiàn)。OSintEnter()函數(shù)通知μC/OS-Ⅱ進入中斷服務(wù)子程序,OS_SAVE_SP()函數(shù)用來保存堆棧指針,OSTimeTick()函數(shù)給要求延時若干時鐘節(jié)拍的任務(wù)延遲計數(shù)器減1,當(dāng)反復(fù)運行該程序后,計數(shù)器為0時,則表明該任務(wù)進入了就緒狀態(tài),OSintExit()函數(shù)標(biāo)志時鐘節(jié)拍中斷服務(wù)子程序結(jié)束。
之后最重要的一點,就是要將中斷服務(wù)子程序OSTickISR()與任務(wù)級任務(wù)切換函數(shù)OSCtxSw()添加到系統(tǒng)中斷向量表的相應(yīng)位置中。這里使用的是實時時鐘中斷模塊(RTI)來實現(xiàn)時鐘中斷的產(chǎn)生,因此要將OSTickISR()連接到向量表RTI位置。OSCtxSw()函數(shù)是利用軟中斷來實現(xiàn)任務(wù)的切換功能的,因此軟中斷服務(wù)子程序的向量地址必須指向OSCtxSw()。
在進行上述程序編寫后,下載代碼到硬件中,μC/OS-Ⅱ就可以在本系統(tǒng)上實現(xiàn)運行了。
3 通信程序設(shè)計
利用任務(wù)形式來解決POC狀態(tài)的檢測問題,不僅可以提高程序效率以及避免死循環(huán)現(xiàn)象,同時,還可以建立通信故障檢測報警任務(wù),在不同的通信狀態(tài)下,對駕駛員提供故障信息,方便處理。
線控轉(zhuǎn)向程序結(jié)構(gòu)包括系統(tǒng)初始化、通信控制、數(shù)據(jù)采集和控制算法四大部分。這里只對其中的系統(tǒng)初始化及通信控制部分進行了設(shè)計。
3.1 系統(tǒng)初始化
在主程序main()中,首先對MC9S12XF512芯片進行初始化,包括:時鐘初始化、I/O口初始化、A/D模塊初始化、PWM模塊初始化以及FlexRay協(xié)議配置初始化。之后,調(diào)用OSInit()函數(shù)對μC/OS-Ⅱ操作系統(tǒng)進行初始化。接著創(chuàng)建三個任務(wù),按照優(yōu)先級順序9、1l、13,分別為FlexRay通信啟動任務(wù)、數(shù)據(jù)接收發(fā)送任務(wù)和故障檢測報警任務(wù),由這三個任務(wù)實現(xiàn)線控轉(zhuǎn)向系統(tǒng)的通信部分功能,其他部分功能可通過創(chuàng)建其他任務(wù)進行擴展。最后調(diào)用OSStart()啟動內(nèi)核運行,讓任務(wù)在操作系統(tǒng)的管理與調(diào)度下運行。
3.2通信任務(wù)設(shè)計
以Freescale公司開發(fā)的針對該芯片的FlexRay通訊傳輸層和表示層的驅(qū)動程序為基礎(chǔ),進行應(yīng)用層的程序設(shè)計,即編寫通信任務(wù)程序,完成協(xié)議的運行過程。
3.2.1 FlexRay通信啟動任務(wù)
按照上文介紹的FlexRay協(xié)議中定義的協(xié)議運行過程,當(dāng)對FlexRay通信進行初始配置后,協(xié)議將進入就緒狀態(tài),之后發(fā)送啟動節(jié)點命令等待協(xié)議狀態(tài)由啟動狀態(tài)變?yōu)檎V鲃訝顟B(tài);在正常主動狀態(tài)中,首先發(fā)送關(guān)鍵幀啟動網(wǎng)絡(luò)中的其他節(jié)點,發(fā)送完成后進入到節(jié)點喚醒狀態(tài),然后開啟FlexRay通信的各種中斷,包括:傳輸中斷、接收中斷、存儲區(qū)中斷以及定時器中斷等,最后掛起任務(wù)等待檢測到通信故障時進行喚醒;協(xié)議正常被動狀態(tài)是在通信出現(xiàn)故障時,重新配置協(xié)議,進行協(xié)議的重啟。需要注意的是用戶必須在多任務(wù)系統(tǒng)啟動以后再開啟時鐘節(jié)拍器,也就是在調(diào)用Osatart()之后,由任務(wù)優(yōu)先級最高的那個任務(wù)開啟RTI中斷,否則系統(tǒng)容易死鎖。程序流程圖如圖2所示。

3.2.2 數(shù)據(jù)接收發(fā)送任務(wù)
FlexRay數(shù)據(jù)的接收發(fā)送是通過中斷服務(wù)程序進行的,因此在該任務(wù)中,只需判斷POC狀態(tài)是否進入正常主動狀態(tài),如果是則使用全局變量對接收函數(shù)Fr_receive_da()和發(fā)送函數(shù)Fr_transmit_data()的消息緩沖區(qū)進行數(shù)據(jù)的讀取和更新。
3.2.3 故障檢測任務(wù)
在通信過程中,當(dāng)其他節(jié)點因故障重啟或是通信線路中斷時,可以利用故障檢測任務(wù)檢查POC狀態(tài),當(dāng)協(xié)議運行在正常被動狀態(tài)時,則判斷為通信線路出現(xiàn)故障,將故障LED指示燈設(shè)定為閃爍狀態(tài);當(dāng)協(xié)議運行在暫停狀態(tài)時,則判斷為節(jié)點控制器故障,故障LED指示燈設(shè)定為常亮狀態(tài),并對FlexRay通信啟動任務(wù)進行解掛,重新對協(xié)議進行配置,待故障解決,系統(tǒng)可以自動啟動節(jié)點運行。程序流程圖如圖3所示。

4 實驗驗證
使用Vector公司的CANoe軟件,可以方便地觀察FlexRay總線上的數(shù)據(jù)流情況。實驗中,將CANoe軟件提供的FlexRay接口板VN3600接入總線網(wǎng)絡(luò)中,之后參考MC9S12XF512芯片手冊中FlexRay通信的MicroTick定義為25 ns,因此在FlexRay初始化定義中,設(shè)置參數(shù)P_MICRO_PER_M-ACRO_NOM為40,則一個MareroTick等于40個MicroTick,也就是說,F(xiàn)lexRay通信配置的基準(zhǔn)時間片為lμs。據(jù)此,配置通信周期為5 000 μs;1個靜態(tài)時槽長度為24μs,共有91個;1個動態(tài)時槽為5μs,共有289個;特征窗與網(wǎng)絡(luò)空閑時間為1 371μs。
程序中對節(jié)點Node_A和Node_B的時槽定義如表2所示。
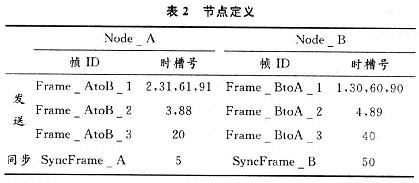
實驗結(jié)果如圖4所示,運行時間2 289 s,時槽變化與周期數(shù)均與設(shè)計一致,數(shù)據(jù)收發(fā)正常。由圖5可知,幀速率為3 200幀/s,總計傳輸7 369 600幀,沒有出現(xiàn)無效幀與錯誤幀,達(dá)到了實時性和穩(wěn)定性的要求。


在通信過程中,分別進行故障模擬實驗。
(1)突然斷開總線來模擬應(yīng)用現(xiàn)場出現(xiàn)線路故障的情況,可以發(fā)現(xiàn)數(shù)據(jù)停止更新,故障檢測LED指示燈閃爍,說明程序檢測到了線路故障問題并進行報警。當(dāng)再次連接總線后,故障檢測LED熄滅,數(shù)據(jù)繼續(xù)更新,說明通信自動重新啟動。
(2)將任意一個控制器進行掉電,模擬單一控制器故障情況,可以發(fā)現(xiàn)數(shù)據(jù)停止更新,故障檢測LED指示燈開始常亮,說明程序檢測到了任意節(jié)點故障導(dǎo)致通信中斷的問題并進行報警。當(dāng)再次開啟掉電控制器后,故障檢測LED熄滅,數(shù)據(jù)繼續(xù)更新,說明通信自動重新啟動。通過以上兩個實驗,驗證了故障檢測報警功能良好。
5 結(jié)語
針對線控轉(zhuǎn)向系統(tǒng)FlexRay通信過程中存在的問題,將實時操作系統(tǒng)μC/OS-Ⅱ應(yīng)用于系統(tǒng)中,進行了代碼移植和通信任務(wù)設(shè)計。之后通過硬件實驗,對數(shù)據(jù)結(jié)果和故障檢測進行了測試,從實驗結(jié)果可以看出,該系統(tǒng)解決了FlexRay總線應(yīng)用的復(fù)雜問題,并利用μC/OS-Ⅱ操作系統(tǒng)保證了系統(tǒng)實時性、穩(wěn)定性和安全性的要求,為今后實現(xiàn)線控轉(zhuǎn)向系統(tǒng)在汽車輔助駕駛和智能駕駛方面的應(yīng)用奠定了基礎(chǔ)。