電動(dòng)自行車作為一種環(huán)保的交通工具已得到了廣泛使用。直流無刷電機(jī)及控制器是電動(dòng)自行車中的關(guān)鍵部件,其性能決定了整個(gè)系統(tǒng)的電能轉(zhuǎn)換效率。控制器根據(jù)霍爾傳感器輸出信號(hào),驅(qū)動(dòng)3相全橋電路,實(shí)現(xiàn)對(duì)直流無刷電機(jī)的控制,因此霍爾信號(hào)的準(zhǔn)確性及換相的實(shí)時(shí)性會(huì)直接影響電機(jī)的性能。在現(xiàn)有電動(dòng)自行車控制器方案中,霍爾傳感器信號(hào)的采集均采用軟件掃描形式進(jìn)行,換相操作也通過軟件處理,換相誤差大,實(shí)時(shí)性差,尤其對(duì)中高速電機(jī)更為明顯。而英飛凌公司的XC866/846可以支持硬件霍爾信號(hào)采集、換相操作,且無需額外電路即可實(shí)現(xiàn)同步整流控制,單片機(jī)利用率高,電機(jī)控制性能好。
直流無刷電機(jī)控制
傳統(tǒng)的直流無刷電機(jī)采用梯形波驅(qū)動(dòng)方式,系統(tǒng)結(jié)構(gòu)框圖如圖1a所示,MCU根據(jù)三個(gè)霍爾傳感器信號(hào)調(diào)制PWM輸出,PWM驅(qū)動(dòng)波形如圖1b所示。由于在這種控制方式下,電機(jī)端電壓波形為梯形波,因此也稱為梯形波控制。從圖1中可以看出,PWM輸出存在6種狀態(tài),對(duì)于每種狀態(tài),逆變橋的6個(gè)功率管中僅有2個(gè)工作,例如,當(dāng)狀態(tài)等于5時(shí),CC60和COUT62對(duì)應(yīng)通道開通。
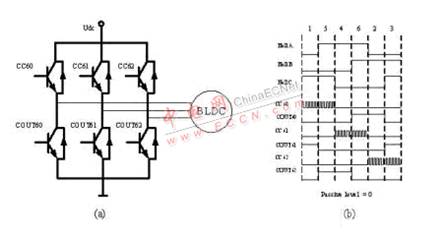
圖1:直流無刷電機(jī)控制拓?fù)浣Y(jié)構(gòu)及PWM驅(qū)動(dòng)信號(hào)波形。
在PWM開通和關(guān)斷期間,逆變橋內(nèi)的電流如圖2所示(以狀態(tài)5為例)。當(dāng)PWM開通時(shí),電流經(jīng)過M1,經(jīng)過電機(jī)及M6返回電源。當(dāng)PWM關(guān)閉時(shí),續(xù)流電流經(jīng)由D2(M2中的寄生二極管)、電機(jī)相線和M6返回電源。由于二極管D2的導(dǎo)通壓降為0.6~1V左右,因此續(xù)流電流在這個(gè)二極管上會(huì)產(chǎn)生較大的損耗,當(dāng)電機(jī)負(fù)載大、續(xù)流電流大的時(shí)候,損耗問題更加嚴(yán)重,將影響逆變器效率。
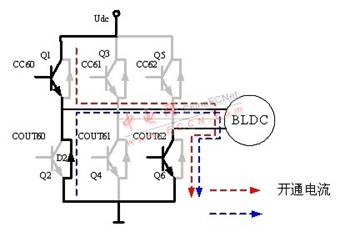
圖2:簡單梯形波控制中的電流示意圖。
為減少續(xù)流電流在寄生二極管上產(chǎn)生的損耗,在一些應(yīng)用中使用MOSFET作為逆變元件。由于MOFSET具有導(dǎo)通阻抗低、電流可以雙向流動(dòng)的特點(diǎn),在M1關(guān)斷,進(jìn)入續(xù)流階段時(shí),開通M2,使續(xù)流電流流經(jīng)M2,由于MOSFET的導(dǎo)通阻抗極低,損耗很小,例如當(dāng)續(xù)流電流為10A,MOSFET導(dǎo)通電阻10mΩ,二極管D2壓降0.7v時(shí),若續(xù)流電流流經(jīng)D2時(shí)產(chǎn)生損耗為7W,而流經(jīng)MOSFET時(shí)產(chǎn)生損耗僅為1W,因此使用這種控制方式可以減少損耗,提高逆變器的效率,在續(xù)流電流大的情況下效果更加明顯。這種控制方式亦稱為同步整流,電流示意圖如圖3a。由于MOSFET的上、下管需要交替開通,為避免直通的危險(xiǎn),需要添加死區(qū)時(shí)間。采用同步整流控制時(shí),6路PWM的驅(qū)動(dòng)波形如圖3b所示。
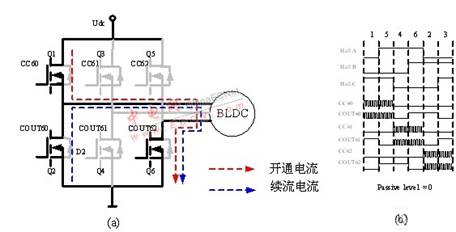
圖3:同步整流控制中的PWM驅(qū)動(dòng)及電流示意圖。
CCU6E霍爾傳感器模式
捕獲/比較單元6(CCU6E)是英飛凌的8/16位單片機(jī)中包含的專用電機(jī)驅(qū)動(dòng)單元,內(nèi)部結(jié)構(gòu)如圖4所示。CCU6E包含兩個(gè)專用16位定時(shí)器(T12,T13),可以產(chǎn)生各種PWM調(diào)制信號(hào),支持交流電機(jī)、直流無刷電機(jī)、開關(guān)磁阻電機(jī)等多種電機(jī)控制,結(jié)構(gòu)框圖如圖4所示。CCU6E還提供支持塊交換和多相電機(jī)控制的多通道模式,并集成專用霍爾傳感器模式,可在使用極少CPU資源的前提下實(shí)現(xiàn)直流無刷電機(jī)的控制。
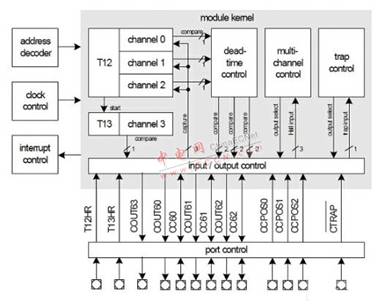
圖4:CCU6E結(jié)構(gòu)框圖。
霍爾傳感器模式如圖6所示。在霍爾傳感器模式中,CCU6E通過專用輸入接口*OS0、1、2自動(dòng)采樣霍爾信號(hào),為濾除霍爾信號(hào)中的干擾,CCU6E利用死區(qū)時(shí)間計(jì)數(shù)器DTC0實(shí)現(xiàn)濾波功能,任何霍爾信號(hào)的跳變將自動(dòng)重載DTC0并開始向下計(jì)數(shù),當(dāng)DTC0計(jì)數(shù)到1時(shí),進(jìn)行霍爾信號(hào)的采集操作。從而在霍爾信號(hào)變化到采樣點(diǎn)之間產(chǎn)生了一個(gè)延時(shí),減少干擾對(duì)換相的影響。
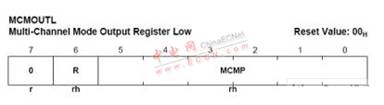
圖5:寄存器MCMOUTL定義。
當(dāng)濾波延時(shí)完成后,CCU6E會(huì)自動(dòng)進(jìn)行霍爾信號(hào)的采樣和比較操作,如果霍爾輸入值等于期望值(MCMOUTH中EXPH),則表明發(fā)生正確的霍爾換相事件(CHE),可觸發(fā)正確霍爾換相中斷。如果輸入霍爾信號(hào)既不等于期望值,也不等于當(dāng)前霍爾值,則表明霍爾信號(hào)發(fā)生錯(cuò)誤(如霍爾信號(hào)線斷開),同時(shí)可觸發(fā)錯(cuò)誤霍爾事件中斷,通知CPU進(jìn)行相應(yīng)處理。
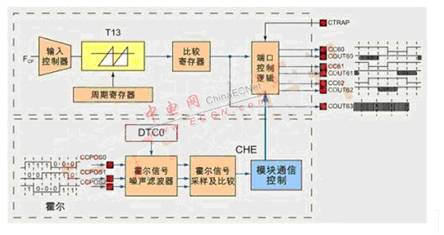
圖6:CCU6E 霍爾傳感器模式示意圖。
正確霍爾換相事件(CHE)可以觸發(fā)換相操作,自動(dòng)更新多通道模式輸出控制寄存器(MCMOUTL)。MCMOUTL用于調(diào)制6路PWM,其寄存器定義如圖5所示,MCMPx(x = 0~5)用于調(diào)制6路PWM(CC60~62,COUT60~62),當(dāng)MCMPx = 1時(shí),對(duì)應(yīng)的PWM通道輸出PWM,當(dāng)MCMPx = 0時(shí),對(duì)應(yīng)的PWM輸出無效電平,因此對(duì)MCMOUL的更新即可以實(shí)現(xiàn)對(duì)6路PWM的調(diào)制操作。
為避免軟件更新MCMOUTL帶來的換相延遲,CCU6E添加了映射機(jī)制,使用MCMOUTSL寄存器(映射寄存器)。當(dāng)正確換相事件發(fā)生時(shí),MCMOUTSL中的內(nèi)容會(huì)自動(dòng)更新到MCMOUTL中,從而自動(dòng)改變6路PWM的輸出狀態(tài)。用戶程序僅需在下次換相前更新映射寄存器MCMOUTSL即可。
定時(shí)器T13用于產(chǎn)生PWM信號(hào),PWM與MCMPx(x = 0~5)進(jìn)行耦合,輸出到PWM端口,產(chǎn)生所需的PWM。
在霍爾傳感器模式中,CCU6E可以自動(dòng)進(jìn)行霍爾信號(hào)的濾波、采樣、比較、換相操作,與傳統(tǒng)的軟件掃描相比,換相準(zhǔn)確,換相誤差小,尤其對(duì)于高速直流無刷電機(jī)等對(duì)換相誤差要求高的應(yīng)用領(lǐng)域,其優(yōu)勢更加明顯。
霍爾傳感器模式在同步整流中的應(yīng)用
在同步整流控制中,需要互補(bǔ)輸出的PWM,但T13無法滿足要求,因此需要使用T12生成互補(bǔ)PWM,DTC0~2用于死區(qū)時(shí)間生成。由于霍爾傳感器模式中使用DTC0進(jìn)行霍爾濾波操作,因此在同步整流中無法使用。此時(shí)利用CCU6E中T13可與其它外部事件進(jìn)行同步的特性替代DTC0,完成硬件霍爾濾波。系統(tǒng)框圖如7所示,任何霍爾信號(hào)的跳變可自動(dòng)觸發(fā)T13定時(shí)操作(T13TEC = 0x07),通過設(shè)定T13周期值即可實(shí)現(xiàn)濾波時(shí)間的設(shè)定,當(dāng)T13計(jì)數(shù)到周期設(shè)定值時(shí),自動(dòng)觸發(fā)霍爾信號(hào)的采樣及比較操作(HSYNC = 0x02)。PWM由T12與3個(gè)通道設(shè)定值比較產(chǎn)生,同時(shí)添加死區(qū)時(shí)間,當(dāng)正確霍爾事件發(fā)生時(shí),PWM信號(hào)與MCMPx耦合,輸出到對(duì)應(yīng)的PWM端口。
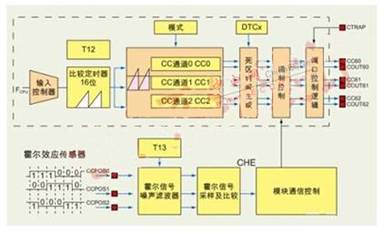
圖7:適用于同步整流的“霍爾傳感器模式”示意圖。
實(shí)驗(yàn)結(jié)果
本文針對(duì)上述控制方法,在英飛凌低壓驅(qū)動(dòng)套件上進(jìn)行實(shí)現(xiàn),驅(qū)動(dòng)24V直流無刷電機(jī)BL3056,PWM頻率15K,霍爾信號(hào)通過*OS0 - 2輸入,霍爾輸入濾波時(shí)間10us,實(shí)現(xiàn)同步整流控制。電機(jī)端線對(duì)地電壓如圖8所示。每相逆變橋的上、下管交替導(dǎo)通,死區(qū)時(shí)間為2us。
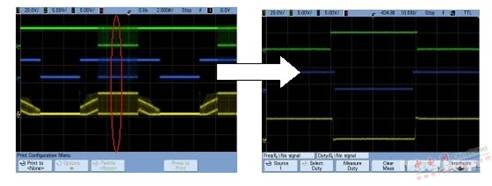
圖8:同步整流控制中電機(jī)端線及逆變橋驅(qū)動(dòng)電壓。
圖9為同步整流控制下,霍爾信號(hào)輸入及換相之間的波形圖,其中紫、黃、綠色波形為霍爾輸入信號(hào),D0~D5為六路PWM輸出信號(hào),由圖可以看出霍爾信號(hào)跳變至輸出PWM換相之間的間隔為10us,正好為T13的濾波時(shí)間。
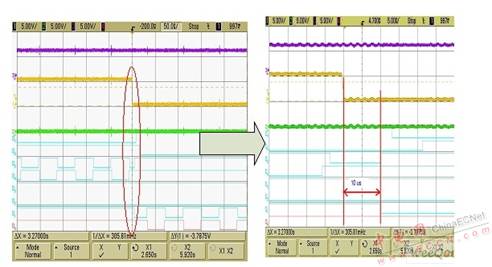
圖9:利用霍爾傳感器模式時(shí)的換相波形。
本文小結(jié)
本文闡述了利用英飛凌XC866/846中包含的CCU6E模塊實(shí)現(xiàn)硬件霍爾換相和同步整流的方案,并進(jìn)行了驗(yàn)證。與傳統(tǒng)的利用軟件掃描霍爾輸入的方案相比,CCU6E可以自動(dòng)進(jìn)行霍爾信號(hào)濾波、采樣、比較及換相等操作,CPU占用率低,占有軟件資源少,換相誤差小,電機(jī)控制效率高,對(duì)于高速電機(jī)等對(duì)換相誤差要求高的應(yīng)用,具有很大優(yōu)勢。
