本文以一臺(tái)計(jì)算機(jī)為主控制器,采用Windows風(fēng)格接口軟 件,計(jì)算和測(cè)試速度快,信息處理能力強(qiáng),系統(tǒng)集成度高,工作界面友好,操作方便,實(shí)現(xiàn)了多參數(shù)測(cè)試過(guò)程自動(dòng)化,提高了測(cè)試效率和準(zhǔn)確性。
系統(tǒng)主要功能及特點(diǎn)
系統(tǒng)以對(duì)機(jī)床性能影響大的參數(shù)集成測(cè)試為主要目的,具有以下功能和特點(diǎn):
(1)系統(tǒng)對(duì)減速器具有測(cè)量載荷,進(jìn)行空載試驗(yàn)、負(fù)載試驗(yàn)、慣性負(fù)載試驗(yàn)、離合器通斷試驗(yàn)、回差試驗(yàn)等功能,可同時(shí)對(duì)X、Y1、Y2三軸進(jìn)行測(cè)試;
(2)系統(tǒng)對(duì)自動(dòng)調(diào)高系統(tǒng)具有在線測(cè)量;調(diào)高精度功能,最多可同時(shí)測(cè)試8機(jī)頭,對(duì)進(jìn)給距離具有自動(dòng)設(shè)置和用戶給定功能,誤差值隨著機(jī)頭的進(jìn)給實(shí)時(shí)計(jì)算并顯示;
(3)具有自動(dòng)測(cè)試時(shí)間設(shè)定、加虛擬負(fù)載、載荷調(diào)節(jié)功能;
(4)對(duì)控制系統(tǒng)具有高溫老化試驗(yàn)功能,自動(dòng)監(jiān)測(cè)和記錄系統(tǒng)狀態(tài);
(5)測(cè)量數(shù)據(jù)動(dòng)態(tài)顯示,如果發(fā)現(xiàn)數(shù)據(jù)超標(biāo)立即報(bào)警或停止實(shí)驗(yàn);
(6)測(cè)試結(jié)果進(jìn)行自動(dòng)分析和打印,并可進(jìn)行相關(guān)文件操作,以便對(duì)測(cè)試結(jié)果進(jìn)行深層分析和統(tǒng)計(jì)。
系統(tǒng)硬件結(jié)構(gòu)和組成
系統(tǒng)采用模塊式結(jié)構(gòu),以計(jì)算機(jī)作為主控制器。計(jì)算機(jī)有著豐富的軟硬件資源和強(qiáng)大的系統(tǒng)功能,運(yùn)算和控制速度高,在現(xiàn)場(chǎng)控制上有著良好的控制性能。系統(tǒng)其他部分都通過(guò)接口卡與計(jì)算機(jī)相連,被其控制同時(shí)為其提供測(cè)試數(shù)據(jù)。通過(guò)執(zhí)行計(jì)算機(jī)上的接口軟件,系統(tǒng)的硬件結(jié)構(gòu)框圖如圖1所示。主要有以下部 分:
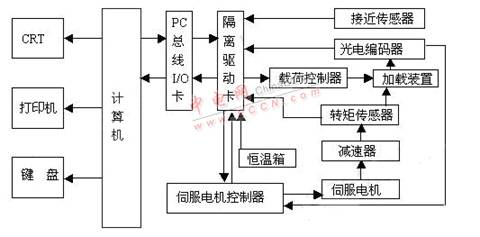
圖1 系統(tǒng)結(jié)構(gòu)框圖
主控制器
系統(tǒng)的主控制器由一臺(tái)工控計(jì)算機(jī)、標(biāo)準(zhǔn)鍵盤(pán)、鼠標(biāo)器、CRT彩色顯示器和打印機(jī)等組成。計(jì)算機(jī)作為系統(tǒng)的主控制器,通過(guò)接口卡控制其他部分動(dòng)作,采集測(cè)試數(shù)據(jù),并對(duì)這些數(shù)據(jù)進(jìn)行復(fù)雜的計(jì)算和分析,完成系統(tǒng)集成的各項(xiàng)測(cè)試功能,同時(shí)在測(cè)試的過(guò)程中,對(duì)測(cè)試結(jié)果進(jìn)行實(shí)時(shí)動(dòng)態(tài)顯示,如果發(fā)現(xiàn)超標(biāo)即 進(jìn)行報(bào)警處理,并自動(dòng)記錄故障時(shí)刻,以便操作者采取相關(guān)措施。操作者可通過(guò)顯示器、鍵盤(pán)和鼠標(biāo)進(jìn)行人機(jī)操作,選擇相應(yīng)的測(cè)試項(xiàng)目,輸入必要的測(cè)試參數(shù),監(jiān)測(cè)整個(gè)測(cè)試過(guò)程,并進(jìn)行相應(yīng)的文件操作,通過(guò)打印機(jī)打印測(cè)試結(jié)果。
接口模塊
接口模塊主要包括隔離驅(qū)動(dòng)卡,輸入輸出接口卡。輸入輸出接口卡負(fù)責(zé)計(jì)算機(jī)對(duì)測(cè)試裝置的控制和數(shù)據(jù)采集,分為數(shù)字信號(hào)接口和模擬信號(hào)接口,模擬輸入(AI)采用研華PCI-726,模擬輸出(AO)采用研華PCI-1710,隔離驅(qū)動(dòng)卡數(shù)字輸入(DI)數(shù)字輸出(DO)采用研華PCI- 734。具體通道數(shù)確定如下:
數(shù)字輸入(DI):
轉(zhuǎn)矩傳感器 3路
碼盤(pán) 18路
故障報(bào)警 3路
模擬輸入(AI):
接近傳感器 8路
數(shù)字輸出(DO):
離合器 3路
脈沖禁止 3路
SV-ON 3路
脈沖串 3路
符號(hào) 3路
C-MODE 3路
模擬輸出(AO):
伺服指令: 3路
加載控制: 3路
總計(jì)DI:24路,AI:8路,DO:18路,AO:6路。
本系統(tǒng)采用的輸入輸出接口卡均為PCI總線,由于測(cè)試和控制量較多,所以采用了三塊接口卡,通過(guò)硬件調(diào)線,設(shè)置其基地址分別為300H和330H。模擬信號(hào)輸入輸出通道相互獨(dú)立,分辨率為12位,其信號(hào)范圍如下:
輸入范圍:-10V~+10V
輸出范圍:-10V~+10V
接口卡的數(shù)字輸入輸出信號(hào)與TTL電平兼容,易于和其他部分相連,特性如下:
輸入低電平VIL≤0.8V
輸入高電平VIH≥2.0V
輸出低電平VOL≤0.5V
輸出高電平VOH≥2.4V
為了保證系統(tǒng)運(yùn)行的安全性,系統(tǒng)還采用了一塊隔離驅(qū)動(dòng)卡,通過(guò)光電隔離等手段來(lái)保證計(jì)算機(jī)信號(hào)和外界信號(hào)的隔離,并把接口卡的輸出信號(hào)放大為伺服驅(qū)動(dòng)器和離合器等所需強(qiáng)度控制信號(hào)。
運(yùn)動(dòng)控制模塊
主要包括伺服系統(tǒng)和加載系統(tǒng)。伺服系統(tǒng)由伺服電機(jī)驅(qū)動(dòng)器、伺服電機(jī)和光電碼盤(pán)組成,其主要作用是控制測(cè)試過(guò)程中被測(cè)減速器按照一運(yùn)動(dòng)規(guī)律運(yùn)轉(zhuǎn)。本系統(tǒng)中,采用了3套松下(MINAS)伺服系統(tǒng)分別控制X、Y1、Y2三軸,該系統(tǒng)有速度控制、位置控制和轉(zhuǎn)矩控制三種控制方式,能滿足測(cè)試過(guò)程中的各種運(yùn)動(dòng)控制要求,在使用前,需進(jìn)行參數(shù)設(shè)置,有關(guān)參數(shù)設(shè)置如下:
NO.25=10000, NO.26=7200
NO.27=1, NO.29=3
伺服驅(qū)動(dòng)器受計(jì)算機(jī)接口卡控制,接口卡的伺服指令輸出為+3V時(shí),伺服電機(jī)轉(zhuǎn)速為1500轉(zhuǎn)/分。計(jì)算機(jī)還通過(guò)接口卡控制伺服驅(qū)動(dòng)器的符號(hào)位、輸出禁止、SV-ON位和C-MODE位。符號(hào)為1時(shí)對(duì)應(yīng)CCW方向(正轉(zhuǎn)),脈沖輸出為1時(shí)禁止有效,SV-ON低電平有效,C-MODE低電平為 速度控制方式,高電平為位置控制方式,在測(cè)試過(guò)程中,根據(jù)測(cè)試項(xiàng)目不同,計(jì)算機(jī)按照程序改變這些控制信號(hào),使伺服電機(jī)工作于不同方式和狀態(tài)。
加載系統(tǒng)主要負(fù)責(zé)向軸端提供虛擬負(fù)載,加載控制器接受計(jì)算機(jī)輸出的模擬信號(hào),并根據(jù)這個(gè)信號(hào)調(diào)整加載裝置流過(guò)的電流,進(jìn)而控制軸端轉(zhuǎn)矩。
傳感器模塊
接近傳感器選用量程為20mm,輸出電壓為0~5V的WYD系列直流位移傳感器,該傳感器與電子電路集成一體,安裝使用方便,不需外加放大器,可直接與計(jì)算機(jī)輸入輸出接口卡連接,進(jìn)行模數(shù)轉(zhuǎn)換及數(shù)據(jù)處理,進(jìn)而把相對(duì)位移的微變量提供給計(jì)算機(jī),系統(tǒng)共采用8個(gè)接近傳感器測(cè)試調(diào)高精度。
轉(zhuǎn)矩傳感器選用JN338轉(zhuǎn)矩傳感器,該傳感器可實(shí)現(xiàn)能源及信號(hào)的非接觸傳遞,并做到了傳遞與是否旋轉(zhuǎn)無(wú)關(guān),與轉(zhuǎn)速大小無(wú)關(guān),與旋轉(zhuǎn)方向無(wú)關(guān),輸出信號(hào)為脈沖信號(hào)。
增量式光電編碼器作為速度和位移傳感器,它的輸出一方面提供給伺服系統(tǒng)進(jìn)行運(yùn)動(dòng)控制,另一方面供計(jì)算機(jī)采集,計(jì)算機(jī)通過(guò)軟件對(duì)編碼器輸出信號(hào)進(jìn)行轉(zhuǎn)換和計(jì)數(shù),計(jì)數(shù)總值與脈沖當(dāng)量的積即為位移量,而短時(shí)間內(nèi)的位移量即為瞬時(shí)速度。
接口軟件開(kāi)發(fā)
系統(tǒng)接口軟件主應(yīng)用程序是在Windows操作系統(tǒng)下,用可視化程序開(kāi)發(fā)工具Visual Basic6.0開(kāi)發(fā)的. 軟件操作界面采用Windows風(fēng)格,其框圖如圖2所示。
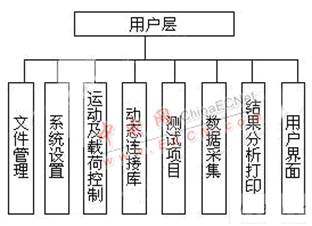
圖2 系統(tǒng)軟件框圖
Visual Basic6.0是一門(mén)功能強(qiáng)大的計(jì)算機(jī)高級(jí)可視化編程語(yǔ)言,但卻不能直接訪問(wèn)計(jì)算機(jī)輸入輸出接口,為了解決這一問(wèn)題,系統(tǒng)用C++語(yǔ)言編制了一個(gè)動(dòng)態(tài)連 接庫(kù)(DLL),對(duì)硬件端口的訪問(wèn)功能全在連接庫(kù)中實(shí)現(xiàn),當(dāng)需要訪問(wèn)某個(gè)端口時(shí),調(diào)用相應(yīng)的連接庫(kù)函數(shù),進(jìn)行動(dòng)態(tài)連接。這樣不但實(shí)現(xiàn)了預(yù)定功能,而且使軟件結(jié)構(gòu)優(yōu)化,節(jié)約了大量系統(tǒng)資源。
結(jié)論
以本系統(tǒng)設(shè)計(jì)的機(jī)床測(cè)試系統(tǒng),運(yùn)行平穩(wěn),界面友好,操作方便,控制精度高,定位精度X軸Y1軸Y2軸都達(dá)到了0.024mm,重復(fù)定位精度X軸Y1軸Y2軸都達(dá)到了0.015mm。
