
O 引言
家庭智能控制系統(tǒng)的主要功能集中在家庭安全報警、電話或電腦遠(yuǎn)程控制、紅外遙控、自動抄表控制、燈光和濕度控制等方面。根據(jù)智能終端設(shè)備傳輸數(shù)據(jù)和功能的不同可以把它分成兩類子網(wǎng),一類是傳輸數(shù)據(jù)以數(shù)據(jù)量小、速率低的家庭自動化控制設(shè)備;另一類是傳輸多媒體信息、(視頻、音頻信號),信號量大、速率快,如視頻會議、音頻點播等。家庭智能終端設(shè)備可以采用總線結(jié)構(gòu)組建成有線子網(wǎng)和無線子網(wǎng),因各設(shè)備分布在家中不同的地方,對于組建成有線子網(wǎng)布線比較復(fù)雜,但是如果采用PLC與CAN總線構(gòu)建成網(wǎng)絡(luò),將降低成本。
CAN(Controller Area Network,控制器局域網(wǎng))是德國Bosch公司在20世紀(jì)80年代初為汽車檢測控制而開發(fā)的一種串行數(shù)據(jù)通訊協(xié)議,它是一種多主機總線,通訊介質(zhì)可以是雙絞線、同軸電纜或光導(dǎo)纖維,通訊速率為1Mb/s。CAN總線具有卓越的性能,極高的可靠性和獨特的設(shè)計,廣泛應(yīng)用于工業(yè)自動化、交通工具、醫(yī)療儀器以及建筑、環(huán)境控制等眾多部門。
1 家庭智能化控制系統(tǒng)的組成
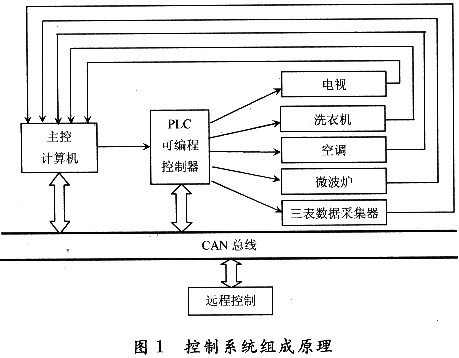
家庭智能化控制系統(tǒng)是電視、洗衣機、空調(diào)及水表、電表、燃?xì)獗淼仍O(shè)備的指揮通信和信息管理的核心,主要功能是與遠(yuǎn)程控制系統(tǒng)進(jìn)行數(shù)傳通信,接收各種控制口令,完成對相應(yīng)設(shè)備的實時控制。
控制系統(tǒng)中凡具有嵌入式微處理器或微計算機的單體均通過CAN總線相互連接。組成分布式局部網(wǎng),實現(xiàn)數(shù)據(jù)交換和信息資源共享。這種設(shè)計具有以下優(yōu)點:減少了通信端口、連接電纜;抗干擾能力強;配置靈活、系統(tǒng)擴展和升級方便;調(diào)試簡單,檢修方便。
由CAN總線組成的家庭智能化控制系統(tǒng)原理如圖1所示。
2 PLC與CAN總線的連接
現(xiàn)以GE FANUC系列90 PLC為例,給出一個PLC與CAN總線的連接方案。
GE系列90 PLC都帶有經(jīng)轉(zhuǎn)換的RS 232串行通訊口,編程計算機通過此串口與PLC進(jìn)行通訊和編程。RS 232標(biāo)準(zhǔn)電平采用負(fù)邏輯,規(guī)定+3~+15V之間的任意電平為邏輯“0”電平,-3~-15V之間的任意電平為邏輯“1”電平。而CAN信號則使用差分電壓傳送,兩條信號線稱為“CAN _H”和“CAM_L”,靜態(tài)時均為2.5 V左右,此時的狀態(tài)表示為邏輯“1”,也可以叫做“隱性”;用CAN_H比CAN_L高表示邏輯“0”,稱為“顯性”。顯性時,通常電壓值為:CAN_H=3.5V,CAN_L=1.5V。
RS 232串口的幀格式為:1位起始位,8位數(shù)據(jù)位,1位可編程的第9位(此位為發(fā)送和接收的地址/數(shù)據(jù)位),1位停止位。而CAN的數(shù)據(jù)幀格式為:幀信息+ID+數(shù)據(jù)(可分為標(biāo)準(zhǔn)幀和擴展幀兩種格式)。因此,設(shè)計時就需要有一個微控制器來實現(xiàn)電平和幀格式等的轉(zhuǎn)換,其轉(zhuǎn)換方式如圖2所示。
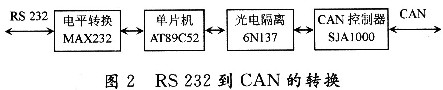
用單片機AT89C52作為微處理器;用SJAl000作為CAN微控制器,SJAl000中集成了CAN協(xié)議的物理層和數(shù)據(jù)鏈路層功能,可被動局面對通信數(shù)據(jù)的幀處理;高速光電隔離用6N137實現(xiàn),其作用是防止串入信號干擾;MAX232用來完成RS 232電平到微控制器接口芯片TTL電平的轉(zhuǎn)換。具體的硬件接口電路參見SJAl000的資料,但有以下幾點需要注意:
(1)CAN總線兩端接有一個120 Ω的電阻,其作用是匹配總線阻抗,提高數(shù)據(jù)通信的抗干擾性及可靠性。但實際上只需保證CAN網(wǎng)絡(luò)中“CAN_H”和“CAN_L”之間的跨接電阻為60 Ω即可。
(2)SJAl000的20引腳RXl在不使用時可接地,配合CDR.6的置位可使總線長度大大增加。
(3)引腳TX0,TXl的接法決定了串行輸出的電平。具體關(guān)系可參考輸出控制寄存器OCR的設(shè)置。
(4)AT82C250的RS引腳與地間接有1個斜率電阻。電阻大小可根據(jù)總線通信速度作適當(dāng)調(diào)整,一般在16~140 kΩ之間。
(5)MAX232外圍需要4個電解電容C1,C2,C3,C4,這些電容也是內(nèi)部電源轉(zhuǎn)換所需電容,其取值均為1μF/25 V,宜選用鉭電容并且位置應(yīng)用量靠近芯片,電源Vcc和地之間要接1個0.1μF的去耦電容。
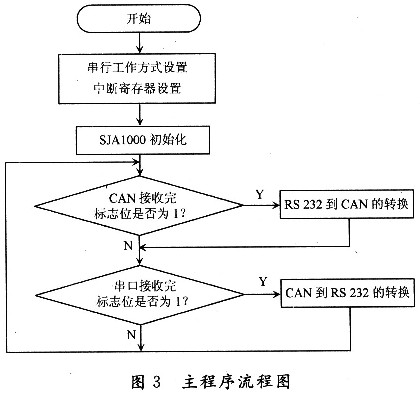
在微處理控制下,RS 232和CAN進(jìn)行數(shù)據(jù)交換時,采用串口接收和CAN中斷方式可提高工作效率。SJAl000的初始化在復(fù)位模式下才可以進(jìn)行,主要包括工作方式的設(shè)置、時鐘分頻和驗收濾波寄存器的設(shè)置、波特率參數(shù)的設(shè)置以及中斷允許寄存器的設(shè)置等。其主程序流程圖如圖3所示。
數(shù)據(jù)能否準(zhǔn)確傳遞還取決于波特率和流量控制,這也是軟件設(shè)計時不可忽略的地方。因此接下來主要介紹CAN波特率的設(shè)置、串口波特率的自動檢測、串口數(shù)據(jù)流量控制。
CAN協(xié)議中的要素之一是波特率。可以設(shè)置位周期中的位采樣點位置和采樣次數(shù),以使可以自由地優(yōu)化應(yīng)用網(wǎng)絡(luò)性能,但在優(yōu)化過程中,要注意位定時參數(shù)基準(zhǔn)參考振蕩器的容差和系統(tǒng)中不同信號傳播延遲之間的關(guān)系。
系統(tǒng)的位速率fbit表示每單位時間傳輸數(shù)據(jù)位的量,即波特率fbit=1/tbit。額定的位定時由3個互不重疊的段SYNC_SEG,TSEGl和TSEG2組成,這3個時間段分別是tSYNC_SEG,tTSEGl和tTSEG2。所以,額定位周期tbit是3個時間段的和:tbit=tSYNC_SEG+tTSEGl+tTSEG2。位周期中這些段都用整數(shù)個基本時間單位來表示。該時間單位叫時間份額TQ,時間份額的持續(xù)時間是CAN系統(tǒng)時鐘的一個周期tSCL,可從振蕩器時鐘周期tCLK取得。通過編程預(yù)分頻因數(shù)(波特率預(yù)設(shè)值BRP)可以調(diào)整CAN系統(tǒng)時鐘,即tSCL=BRP×2tCLK=2BPR/CLK。
對CAN位定時計算的另一個很重要的時間段是同步跳轉(zhuǎn)寬度(SJW),持續(xù)時間是tSJW。SJW段并不是位周期的一段,只是定義了在重同步事件中被增長或縮短的位周期的最大TQ數(shù)量。此外,CAN協(xié)議還允許用戶指定位采樣模式(SAM),分別是單次采樣和三次采樣模式(在3個采樣結(jié)果中選出1個)。在單次采樣模式中,采樣點在TESG1段的末端。而三次采樣模式比單次采樣多取兩個采樣點,它們在TSEGl段末端的前面,之間相差一個TQ。上面所提到的BPR,SJW,SAM,TESGl,TESG2都可由用戶通過CAN控制器的內(nèi)裝中寄存器BTR0和BTRl來定義。設(shè)置好BTR0和BTRl后,實際傳輸?shù)牟ㄌ芈史秶鸀椋鹤畲?1/(tbit-tSJW),最小=1/(tbit+tSJW)。
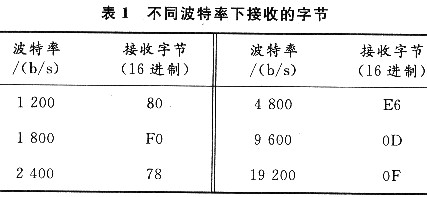
檢測轉(zhuǎn)換裝置的串口波特率,首先可對主機的接收波特率(以9600 b/s為例)進(jìn)行設(shè)定,并在終端發(fā)送一個特定的字符(以回車符為例),這樣,主機根據(jù)接收到的字符信息就可以確定轉(zhuǎn)換裝置的通信波特率。回車符的ASCII值是0DH,在不同波特率下接收到的值如表1所列。
數(shù)據(jù)在兩個串口之間的傳輸時,常常會出現(xiàn)丟失數(shù)據(jù)的現(xiàn)象。由于單片機緩沖區(qū)有限,如接收數(shù)據(jù)時緩沖區(qū)已滿,那么此時繼續(xù)發(fā)送來的數(shù)據(jù)就會丟失。而流控制能有效地解決該問題,當(dāng)接收端數(shù)據(jù)處理不過來時,流控制系統(tǒng)就會發(fā)出“不再接收”的信號,而使發(fā)送端停止發(fā)送,直到收到“可以繼續(xù)發(fā)送”的信號再發(fā)送數(shù)據(jù)。因此流控制可以控制數(shù)據(jù)傳輸?shù)倪M(jìn)程,防止數(shù)據(jù)丟失。常用的兩種流控制是硬件流控制(包括RTS/CTS,DTR/CTS等)和軟件流控制XON/XOFF(繼續(xù)/停止),下面僅就硬件流控制RTS/CTS加以說明。
采用硬件進(jìn)行流控制時,串口終端RTS,CTS接到單片機的I/O口,通過置I/O口為1或0來接收和發(fā)出起停信號。數(shù)據(jù)終端設(shè)備(如計算機)使用RTS來起始單片機發(fā)出的數(shù)據(jù)流,而單片機則用CTS來起動和暫停來自計算機的數(shù)據(jù)流。實現(xiàn)這種硬件握手方式時,在編程時根據(jù)接收端緩沖區(qū)的大小設(shè)置一個高位標(biāo)志和一個低位標(biāo)志,當(dāng)緩沖區(qū)內(nèi)數(shù)據(jù)量達(dá)到高位時,就在接收端將CTS線置低(送邏輯0),而當(dāng)發(fā)送端的程序檢測到CTS為低后,就停止發(fā)送數(shù)據(jù),直到接收端緩沖區(qū)的數(shù)據(jù)量低于低位而將CTS置高為止。RTS則用來標(biāo)明接收設(shè)備有沒有準(zhǔn)備好接收數(shù)據(jù)。
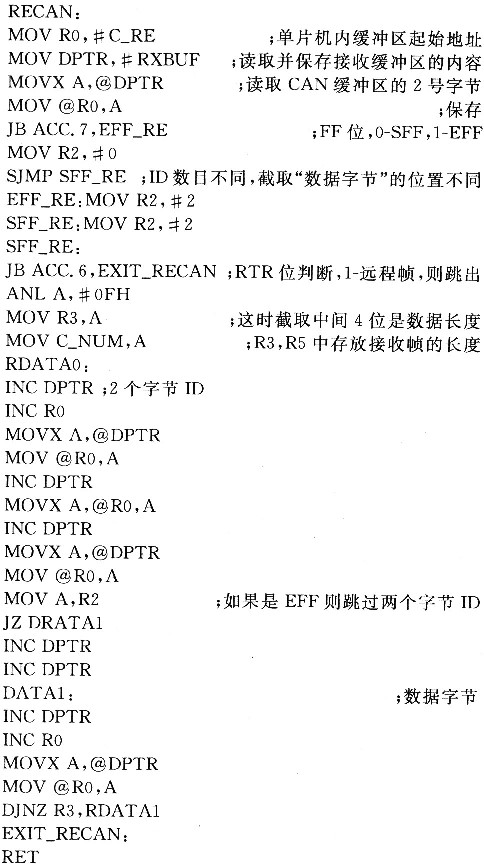
以下是CAN接收子程序:

3 結(jié)語
通過對家庭智能控制系統(tǒng)的分析,采用PLC與CAN總線構(gòu)建成控制性局域網(wǎng),通過仿真系統(tǒng)的測試,該總線完全能完成對家庭智能終端設(shè)備實行控制,但要使它控制的穩(wěn)定性和實時性得到進(jìn)一步提高,還需在此基礎(chǔ)上作更加深入的研究。