
0 引言
在過程控制中,由于工業(yè)現(xiàn)場非常分散,I/O點(diǎn)數(shù)眾多,各種儀表的工作環(huán)境非常惡劣,采用數(shù)據(jù)采集卡和LabVIEW開發(fā)平臺來完成現(xiàn)場的數(shù)據(jù)采集和控制顯然不可取。考慮到過程控制中的過程參數(shù)變化不是很快,而PLC恰恰可以克服數(shù)據(jù)采集卡在過程控制中的不足,并且
具有較高的性價比,因而采取以PLC為下位機(jī),以裝有LabVIEW軟件的工控機(jī)為上位機(jī)開發(fā)平臺。通過RS-232和RS-485串口與PLC通信,實(shí)現(xiàn)對工業(yè)現(xiàn)場的監(jiān)控與現(xiàn)場數(shù)據(jù)的分析。本文根據(jù)這個思想設(shè)計(jì)了一個工業(yè)遠(yuǎn)程監(jiān)控系統(tǒng),上位機(jī)采用PC機(jī),下位機(jī)采用西門子PLC S7-200。介紹了一種在LabVIEW 8.6平臺上開發(fā)PC機(jī)和PLC實(shí)時監(jiān)控的軟件的編程方法,在此基礎(chǔ)上構(gòu)建了基于PLC的主從式虛擬儀器測控系統(tǒng)。
1 系統(tǒng)構(gòu)成與自由口通信模式
1.1 PC與PLC的通信方式
S7-200 CPU上的通信口是與RS-485兼容的9針D型連接器。PLC還提供了實(shí)現(xiàn)RS-485與PC機(jī)上RS-232相連接的PC/PPI電纜,可以方便地實(shí)現(xiàn)S7系列PLC與PC之間的硬件連接。圖1是PC與PLC通信的示意圖,利用主機(jī)上的232串口,通過RS232-RS485轉(zhuǎn)換模塊與PLC相連。系統(tǒng)中如果應(yīng)用多個PLC模塊或其他具有RS485串行通信能力的設(shè)備,亦可方便地聯(lián)網(wǎng)或構(gòu)成網(wǎng)絡(luò)測控系統(tǒng)。

1.2 PC與PLC的通信協(xié)議
西門子S7-200系列的PLC可以在四種通信模式下工作:PPI、MPI、PROFIBUS-DP和自由口通信模式。自由口通信模式是由用戶程序來控制CPU的串口通信。用戶可以利用發(fā)送/接收中斷、發(fā)送/接收指令來控制通信的操作,實(shí)現(xiàn)與打印機(jī)、條形碼閱讀器等設(shè)備的通信。
本文主機(jī)與PLC之間串行通信采用的是自由通信協(xié)議。該協(xié)議采用主從結(jié)構(gòu)的通信方式,傳輸模式是RTU,適用于半雙工的RS485總線。協(xié)議規(guī)定總線上有一個主機(jī),多個從機(jī),每個從機(jī)分配惟一的地址。工作時可以采用命令應(yīng)答的通信方式,每一種命令幀對應(yīng)著一種應(yīng)答幀。主機(jī)向要訪問的從機(jī)發(fā)出命令幀,地址匹配的從機(jī)做出響應(yīng),向主機(jī)發(fā)出命令幀對應(yīng)的應(yīng)答幀。自由通信協(xié)議中,為命令幀定義了許多功能碼,不同的功能碼要求從機(jī)進(jìn)行不同的響應(yīng)。PLC在將傳感器信號轉(zhuǎn)換為數(shù)據(jù)后將其存儲在變量存儲區(qū)的固定區(qū)域。此時PLC的串口一直處于接收狀態(tài),直到接收到來自上位機(jī)的讀命令后,轉(zhuǎn)為發(fā)送狀態(tài),將變量存儲區(qū)中的數(shù)據(jù)通過串口發(fā)送給上位機(jī)。考慮到收發(fā)切換有一定的時間間隔,所以必須延遲一段時間再轉(zhuǎn)為發(fā)送數(shù)據(jù)。
1.3 自由口模式的注意事項(xiàng)
自由口模式通信要注意以下問題:
(1)CPU通信口工作在自由口模式時,通信口就不支持其它通信協(xié)議。CPU停止時,自由口不能工作,編程軟件就可以與CPU通信。
(2)此通信模式下,發(fā)送和接收指令是程序的核心指令,用戶程序不能直接控制通訊芯片而必須通過操作系統(tǒng)。
(3)用戶程序中應(yīng)考慮電纜的切換時間。CPU接收到RS-232設(shè)備的請求到它發(fā)送響應(yīng)的延遲時間必須大于等于電纜的切換時間,可用定時中斷實(shí)現(xiàn)切換延時。
(4)在自由口模式下,通信雙方的通信參數(shù)是由用戶自行設(shè)定的,通信雙方的波特率一定要設(shè)置相同。另外,在PLC網(wǎng)絡(luò)中主站個數(shù)越少,通信速度越快:波特率越大,通信速度也越快,但抗干擾能力降低。因此對于本系統(tǒng)這種單主站的網(wǎng)絡(luò),要注意波特率不宜設(shè)置得過大。
2 虛擬儀器程序設(shè)計(jì)
LabVIEW是美國國家儀器公司開發(fā)的虛擬儀器開發(fā)平臺軟件,功能強(qiáng)大、靈活,廣泛應(yīng)用于自動測量系統(tǒng)以及工業(yè)過程自動化等各個領(lǐng)域。
在LabVIEW編程語言中串口通信采用虛擬儀器體系結(jié)構(gòu)VISA (Virtual Instrument Software Architecture)標(biāo)準(zhǔn)編程。VISA是儀器驅(qū)動的一個工業(yè)標(biāo)準(zhǔn),其內(nèi)部是一個面向?qū)ο蟮慕Y(jié)構(gòu),這一結(jié)構(gòu)使得VISA和在它之前的I/O控制軟件相比,在接口無關(guān)性、可擴(kuò)展性方面都有很大提高。VISA標(biāo)準(zhǔn)的推出,統(tǒng)一了儀器工業(yè)的軟件接口標(biāo)準(zhǔn),使得儀器驅(qū)動程序兼容性強(qiáng)并且可適應(yīng)未來軟硬件的發(fā)展需要。
2.1 LabVIEW中的串口通信函數(shù)
(1)VISA配置串口。該函數(shù)主要用于串口的初始化。主要參數(shù)如圖2所示。

其中“VISA資源名稱”指定要打開的資源。該控件也可指定會話句柄和類。“波特率”是傳輸速率,默認(rèn)值為9600。“數(shù)據(jù)比特”是輸入數(shù)據(jù)的位數(shù),默認(rèn)值為8。“奇偶”指定要傳輸或接收的每一幀所使用的奇偶校驗(yàn)。“停止位”指定用于表示幀結(jié)束的停止位的數(shù)量。“流控制”設(shè)置傳輸機(jī)制使用的控制類型。“VISA資源名稱輸出”是由VISA函數(shù)返回的VISA資源名稱的副本。
(2)VISA讀取函數(shù)。該函數(shù)為串口讀取子程序,從串行設(shè)備讀取數(shù)據(jù),為后續(xù)的數(shù)據(jù)處理提供條件。主要參數(shù)如圖3。
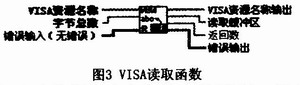
其中“字節(jié)總數(shù)”是要讀取的字節(jié)數(shù)量。“讀取緩沖區(qū)”包含從設(shè)備讀取的數(shù)據(jù)。“返回?cái)?shù)”包含實(shí)際讀取的字節(jié)數(shù)。
(3)VISA寫入函數(shù)。該函數(shù)為串口寫子程序,用于對串口設(shè)備進(jìn)行寫操作。主要參數(shù)如圖4所示。

其中“寫入緩沖區(qū)”包含要寫入設(shè)備的數(shù)據(jù)。“返回?cái)?shù)”包含實(shí)際寫入的字節(jié)數(shù)。
此外,LabVIEW中與串口通信有關(guān)的還有VISA關(guān)閉函數(shù)與VISA串口字節(jié)數(shù)函數(shù),分別用于關(guān)閉串行設(shè)備的任務(wù)或事件和計(jì)算進(jìn)入串口緩存區(qū)中的數(shù)據(jù)字節(jié)數(shù)。
2.2 LabVIEW與PLC串口通信實(shí)現(xiàn)
按照通信協(xié)議使用專用的九芯插頭和PC/PPI電纜,將PC機(jī)的COM1口與S7-200的自由通信口直接連接。由于電纜上帶有RS-232/RS485電平轉(zhuǎn)換器,連接十分方便。LabVIEW進(jìn)行串口通信的基本步驟為:
(1)初始化端口。利用VISA配置串口函數(shù)設(shè)定進(jìn)行串口通信的端口號、波特率、停止位、校驗(yàn)、數(shù)據(jù)位。
(2)讀寫端口。利用VISA讀串口函數(shù)和VISA寫串口函數(shù)從串口中讀入或輸出數(shù)據(jù)。由于LabVIEW的串行通信子程序只允許對字符串的讀寫,因此在數(shù)據(jù)處理時,必須進(jìn)行字符串與數(shù)字之間的正確轉(zhuǎn)換。
(3)關(guān)閉端口。當(dāng)對串口操作完成后,需要關(guān)閉串口,以釋放硬件資源。
3 串口通信實(shí)現(xiàn)
按照上述過程,設(shè)計(jì)了監(jiān)控系統(tǒng)程序,程序框圖與前面板分別如圖5、圖6所示。


其中PC機(jī)與PLC串口通信程序結(jié)構(gòu)分為3個部分:
(1)串口初始化。根據(jù)通信協(xié)議設(shè)定,通信端口:COM1,波特率:9600bps,1位起始位,8位數(shù)據(jù)位,1位停止位,無奇偶校驗(yàn),無軟件握手協(xié)議。
(2)發(fā)送命令和讀取響應(yīng)將命令通過串口COM1發(fā)給PLC,并接收來自PLC的響應(yīng)信息,如果響應(yīng)正常(狀態(tài)信息為O1或02),就將所得數(shù)據(jù)做顯示、計(jì)算分析、存儲等后續(xù)處理,以便用于設(shè)備實(shí)時控制和在線狀態(tài)監(jiān)測;如果響應(yīng)不正常則退出程序(03或04),用戶重新輸入命令開始工作。
(3)關(guān)閉串口。調(diào)用LabVIEW提供的VISA關(guān)閉串口函數(shù)實(shí)現(xiàn)串口資源的釋放。
當(dāng)程序運(yùn)行時,LabVIEW首先向PLC發(fā)出一個讀請求,然后檢測輸入緩存中的字節(jié)數(shù);當(dāng)達(dá)到預(yù)定字節(jié)數(shù)時,LabVIEW利用讀串口函數(shù)將輸入緩存中的字節(jié)一次性讀出,然后繼續(xù)發(fā)出一個讀請求到PLC。如此循環(huán),直至結(jié)束。本程序還采用了狀態(tài)機(jī)的方法進(jìn)行狀態(tài)的判斷和選擇。
4 結(jié)論
PLC自由口通信方式具有與外圍設(shè)備通信方便、自由,易于微機(jī)控制等特點(diǎn),這一通信方式被越來越多的監(jiān)控系統(tǒng)所采用。利用PC機(jī)或工控機(jī)的串口,按照自由通信協(xié)議,結(jié)合地址映射技術(shù)在LabVIEW平臺上開發(fā)出串行通信模塊,可以很方便地實(shí)現(xiàn)主機(jī)與PLC的串行通信,對PLC的內(nèi)存單元進(jìn)行讀寫操作,從而實(shí)現(xiàn)對PLC的監(jiān)控。本文所提出的設(shè)計(jì)能夠方便地應(yīng)用于基于PLC的工業(yè)監(jiān)控,具有開發(fā)方便、擴(kuò)展靈活的優(yōu)點(diǎn)。