
1 引言
隨著汽車業(yè)的快速發(fā)展,與之相關(guān)的交通事故也在快速增高,而這些事故中,疲勞駕駛所造成的交通事故約占總數(shù)的16%,在高速公路上更是超過了20%[1],因此研制疲勞駕駛預(yù)防和報(bào)警裝置成為當(dāng)今疲勞駕駛研究的重點(diǎn)和難點(diǎn)。隨著新技術(shù)的出現(xiàn)和發(fā)展,本文提出了基于ZigBee 無線傳感網(wǎng)絡(luò)技術(shù)與信息融合決策技術(shù)相結(jié)合的疲勞駕駛系統(tǒng)。通過ZigBee 技術(shù)組建的網(wǎng)絡(luò)有如下特性:監(jiān)測方式由于單一而導(dǎo)致系統(tǒng)性能欠佳[2],而系統(tǒng)的擴(kuò)展又受到車身空間布線、成本等各方面的限制。因此利用ZigBee 技術(shù)無線、安全、可靠、低功耗等特點(diǎn),將單片機(jī)控制技術(shù)與之結(jié)合,引入到車輛傳感器的設(shè)計(jì)中,不僅可以省去通信電纜的安裝,降低安裝工程量,還可以安全可靠地實(shí)現(xiàn)數(shù)據(jù)傳輸和網(wǎng)絡(luò)互聯(lián),從而開發(fā)出適用性更強(qiáng)的車輛傳感器。另外ZigBee 技術(shù)低功耗、低成本的特點(diǎn)非常適合行車途中。
2 疲勞檢測系統(tǒng)架構(gòu)與原理
2.1 ZigBee 網(wǎng)絡(luò)的組建與通信
基于車內(nèi)各節(jié)點(diǎn)通信距離比較短,無需路由器擴(kuò)展網(wǎng)絡(luò)覆蓋面,本模型采用 Zigbee 星形網(wǎng)絡(luò)結(jié)構(gòu),只需要協(xié)調(diào)器和各傳感器設(shè)備即可構(gòu)成網(wǎng)絡(luò),從而降低整個(gè)系統(tǒng)的組網(wǎng)復(fù)雜程度。中間的協(xié)調(diào)器負(fù)責(zé)發(fā)起和維護(hù)網(wǎng)絡(luò),并將收集到得信息交給高性能處理器完成信息的融合決策,再由處理器把疲勞判斷結(jié)果傳給警示器。
(1)車道偏離檢測、眼睛頻率檢測、眼睛閉合時(shí)間檢測、打哈欠這4 處先由傳感器收集原始圖像的信息,再將信息傳給各自的DSP 芯片去處理,得到疲勞信息,最后將采集信號(hào)處理的結(jié)果傳輸給ZiBee SoC 模塊。這里采用TI 公司的CC2430,單個(gè)CC2430 芯片上整合了ZigBee 射頻(RF)前端、內(nèi)存和微控制器。在接收和發(fā)射模式下,電流損耗分別低于27mA 或25mA。CC2430 對(duì)于車載系統(tǒng)要求非常長電池壽命的要求來說是比較適合的。這4 處的信息最后都由CC2430 發(fā)送給協(xié)調(diào)器。具體的實(shí)現(xiàn)框架流程圖見圖1。
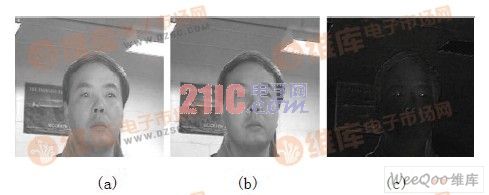
圖1 基于ZigBee 的疲勞監(jiān)測系統(tǒng)框圖
(2)Coordinator 負(fù)責(zé)組網(wǎng)和管理各終端傳感器,組網(wǎng)基本流程為:首先進(jìn)行能量掃描和激活掃描信道,如果發(fā)現(xiàn)合適的信道,則創(chuàng)建一個(gè)唯一的16 位網(wǎng)絡(luò)PAN ID,在ZigBee網(wǎng)絡(luò)系統(tǒng)中Coordinator 的網(wǎng)絡(luò)短地址固定設(shè)置為0,然后開始向四周廣播網(wǎng)絡(luò)信息,并接受處理其網(wǎng)絡(luò)覆蓋范圍內(nèi)的加入網(wǎng)絡(luò)的請(qǐng)求,然后加入新節(jié)點(diǎn)的信息。組網(wǎng)流程圖如下,見圖2。
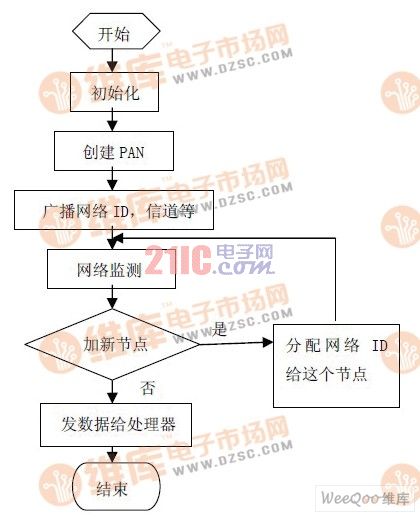
圖 2 組網(wǎng)流程圖
從流程圖我們可以看到協(xié)調(diào)器并不處理和保存?zhèn)鞲衅鞴?jié)點(diǎn)發(fā)來的信息,它直接將疲勞信息交給高性能處理器處理,這樣協(xié)調(diào)器能更好地管理網(wǎng)絡(luò)。處理器負(fù)責(zé)實(shí)現(xiàn)多個(gè)疲勞特征的融合判斷。該模型將協(xié)調(diào)器與信號(hào)匯聚節(jié)點(diǎn)(網(wǎng)關(guān))統(tǒng)一設(shè)計(jì),協(xié)調(diào)器/網(wǎng)關(guān)負(fù)責(zé)與各個(gè)終端設(shè)備的通信與外網(wǎng)的通信。如果駕駛員疲勞駕駛情況嚴(yán)重,易于造成交通事故的時(shí)候,協(xié)調(diào)器將駕駛員信息送入網(wǎng)關(guān),然后轉(zhuǎn)化成外部網(wǎng)絡(luò)的信息格式,最后通過GSM/GPRS 方式與公路安全網(wǎng)通信,發(fā)往遠(yuǎn)程監(jiān)控設(shè)備。
2.2 傳感信息獲取技術(shù)
駕駛員面部圖像通過紅外攝像機(jī)和 LED 來獲取,其中用于照明的LED 能夠發(fā)出光譜分別為850nm 和950nm 的光線。當(dāng)使用不同紅外光譜的時(shí)候,眼睛瞳孔會(huì)呈現(xiàn)出不同顏色。當(dāng)用 850nm 紅外光照明,瞳孔呈現(xiàn)出紅色,即俗稱的紅眼效應(yīng);而用 950nm 紅外光照明,瞳孔卻呈現(xiàn)出黑色。兩幅圖像除了瞳孔以外,臉部其它部位都是一樣的。通過比較這兩幅圖像,就可以很容易定位到眼部,再通過一系列圖像處理來得到面部的參數(shù)和實(shí)現(xiàn)眼部跟蹤。另外,使用紅外LED 在減少周圍光線干擾確保圖像質(zhì)量的同時(shí),還能減少對(duì)駕駛員視覺的干擾,因?yàn)樗墓饩€幾乎是看不到的。眼部對(duì)比情況如圖3
圖3 眼部探測對(duì)比圖 (a)紅眼;(b)黑眼;(c)差分圖像
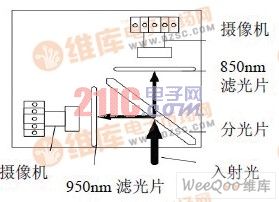
圖4 紅外CCD 攝像頭
為了能夠同時(shí)得到圖3 的(a)、(b)兩幅圖像,可以采用圖4 所示的紅外攝像頭裝置,當(dāng)入射光照到中間的分光片(它可以將入射激光線分離為反射/ 透射比為 1 的兩束光線)的時(shí)候,能將入射光線平行分成兩束,再分別經(jīng)過850nm 和950nm 的濾光片進(jìn)入到攝像頭中,這樣在同一時(shí)刻得到的兩幅圖像除了瞳孔顏色不同,其它的都是一樣的。為了在有限的時(shí)間內(nèi)完成大量圖像數(shù)據(jù)的處理,DSP 圖像處理芯片采用TMS320DM642,它的圖像處理速度能達(dá)到每秒25 幀以上,也就是能在40ms 內(nèi)完成對(duì)一幀圖像的運(yùn)算處理,再加上CCD 攝像頭是PAL 制每秒25 幀的,這些設(shè)備足夠完成實(shí)時(shí)的圖像處理,完成對(duì)駕駛員眨眼頻率加快、眼睛閉合緩慢、打哈欠的疲勞特征的提取和計(jì)算。
車道偏移檢測即基于車輛的行為來間接地反應(yīng)司機(jī)的疲勞跡象。我們將 CCD 攝像頭朝向汽車行駛方向,監(jiān)測車輛的行駛方向,同時(shí)監(jiān)測轉(zhuǎn)向燈。如果汽車方向改變而轉(zhuǎn)向燈沒有開啟,則認(rèn)為駕駛員有進(jìn)入疲勞駕駛的可能。車輛行為的檢測不是基于人為表現(xiàn)活動(dòng),這樣能互補(bǔ)面部檢測的不足和人為差異,同時(shí)在駕駛員不是由于疲勞而是因?yàn)槠渌蛩兀ㄈ缡謾C(jī)、音樂、小孩)造成注意力不集中判斷錯(cuò)誤的時(shí)候,也能給予一定得提醒。
2.3 傳感器融合
我們以 120ms 為一個(gè)小周期,因?yàn)楸鞠到y(tǒng)能在40ms 內(nèi)采集到一幀的圖像,則后80ms用于圖像處理,這樣在一分鐘內(nèi)共有500 幀的圖像。通過這些圖像來分析駕駛員的疲勞情況。根據(jù)人體工程學(xué)原理,人體出現(xiàn)疲勞的時(shí)候,眨眼頻率在某個(gè)時(shí)段比正常時(shí)明顯加快,這是駕駛員在疲勞時(shí)試圖保持清醒的反應(yīng),進(jìn)入更深層次疲勞時(shí)就會(huì)出現(xiàn)眼睛閉合一次時(shí)間加長的特征。清醒時(shí)眼睛一睜一閉的過程只需要幾幀倒十幾幀的時(shí)間(0.25 秒以內(nèi)),而疲勞時(shí)則需要20 幀或一兩秒;打哈欠的時(shí)候嘴部垂直半徑明顯加大。我們先采集駕駛員正常時(shí)候的眨眼頻率,眼睛閉合一次時(shí)間和嘴部信息,然后再與發(fā)生疲勞時(shí)候的情況進(jìn)行對(duì)比,以此判斷疲勞程度。我們采用模糊邏輯法來對(duì)采集到得信息進(jìn)行融合決策。例如:當(dāng)Coordinator只接收到眨眼頻率、眨眼時(shí)間有疲勞異常的時(shí)候,將進(jìn)行如下方式的融合:
(1)輸入及輸出變量隸屬度函數(shù)的建立:對(duì)于兩個(gè)輸入變量眼睛閉合一次的時(shí)間和眨眼頻率以及一個(gè)輸出變量(駕駛員的疲勞狀態(tài)),分別定義三種不同程度的模糊集合,對(duì)每一個(gè)變量,選擇適當(dāng)?shù)碾`屬度函數(shù)。其說明如下:眨眼頻率={快、中、慢};眨眼時(shí)間={短、中、長};疲勞狀態(tài)={不疲勞、輕微疲勞、疲勞}。在本文中選用歸納推理法來確定隸屬度數(shù),采用三角形隸屬度函數(shù)。
(2)模糊化與模糊推理規(guī)則的建立:模糊化是把精確的測量值經(jīng)歸一化轉(zhuǎn)換到輸入變量對(duì)應(yīng)的論域中,再經(jīng)由所定義的隸屬度函數(shù),將其轉(zhuǎn)化為合適的模糊化語言變量,也就是隸屬度以供模糊推理使用。在本文中,輸入變量為眨眼時(shí)間和眨眼頻率,我們采集的圖像經(jīng)過處理后得到眼睛睜閉的情況,并將眨眼頻率轉(zhuǎn)換為眨眼頻率快、眨眼頻率中、眨眼頻率慢、眨眼時(shí)間長、眨眼時(shí)間中、眨眼短等模糊語言。因?yàn)槲覀儗?duì)于眨眼頻率以及眨眼時(shí)間各選用三種程度的模糊集合。因此,其相互間最多可得32=9 條控制規(guī)則,推理如下表1:

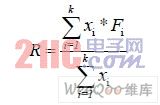
(3)模糊清晰化:模糊清晰化是將模糊邏輯推理后的模糊變量換算成實(shí)際的操作量表現(xiàn)出來。文中選用質(zhì)心法,其計(jì)算公式如下。R:模糊控制器輸出量;k:規(guī)則數(shù);xi:第i個(gè)規(guī)則的隸屬度;Fi:第i 個(gè)規(guī)則隸屬度函數(shù)的質(zhì)心值。疲勞狀態(tài)數(shù)值越高表示越疲勞,本文中眼睛閉合一次時(shí)間的重要性要高于眨眼頻率,因?yàn)檎Q鄢掷m(xù)時(shí)間越長代表了眼睛在眨眼過程中眼睛閉合的時(shí)間越長,不論駕駛員疲勞與否,眼睛閉合越久代表危險(xiǎn)性越高。
實(shí)驗(yàn)結(jié)果對(duì)比:我們對(duì)采集的50 段駕駛員處于疲勞狀態(tài)的視頻分別單獨(dú)使用眨眼時(shí)間、眨眼頻率和二特征融合后的隸屬度值進(jìn)行判決,實(shí)驗(yàn)結(jié)果顯示融合后正確率明顯提高。同理,當(dāng)出現(xiàn)打哈欠、車道路線偏移等疲勞特征時(shí),我們用同樣的方法進(jìn)行融合,系統(tǒng)的正確率達(dá)到95%。
3 結(jié)論
全文對(duì)基于 ZigBee 技術(shù)的疲勞監(jiān)測警示系統(tǒng)進(jìn)行了全面的介紹,并給出了系統(tǒng)設(shè)計(jì)中的關(guān)鍵技術(shù),整個(gè)系統(tǒng)具有獨(dú)特的優(yōu)點(diǎn):(1)采用了基于ZigBee 無線傳感網(wǎng)絡(luò)技術(shù)技術(shù)的,避免了車身布線成本高和干擾嚴(yán)重的問題; (2)采用了多傳感器信息融合技術(shù),能夠較好的分析決策駕駛員疲勞行為。因此,基于ZigBee 技術(shù)的汽車疲勞駕駛監(jiān)測系統(tǒng)對(duì)降低因疲勞引發(fā)的交通事故具有一定的借鑒意義和較好的應(yīng)用前景。本文創(chuàng)新點(diǎn):提出并實(shí)現(xiàn)了ZigBee 網(wǎng)絡(luò)與多傳感器融合技術(shù)相結(jié)合的疲勞監(jiān)測系統(tǒng),適于車載運(yùn)行且擴(kuò)展性好,有效地提高疲勞判斷的準(zhǔn)確性和增強(qiáng)系統(tǒng)的魯棒性。