
0 引言
隨著現(xiàn)代汽車電子技術(shù)的進(jìn)步,汽車內(nèi)傳統(tǒng)的零部件及總成也在向機(jī)電一體化發(fā)展。汽車中大量應(yīng)用的電子設(shè)備,不僅提高了汽車的舒適性,也對(duì)汽車的安全性提出了新的要求。為了方便駕駛員和乘客,大量汽車采用電動(dòng)車窗,許多電動(dòng)車窗都不具有防夾功能,容易造成對(duì)乘員尤其是兒童的傷害。美國(guó)交通部頒布了針對(duì)電動(dòng)車窗開(kāi)關(guān)系統(tǒng)的法規(guī)FMVSSll8,對(duì)車窗防夾相關(guān)參數(shù)做出了明確規(guī)定,并規(guī)定在2008年10月1日之后在北美出售的轎車和小型貨車都必須強(qiáng)制執(zhí)行該規(guī)定。雖然我國(guó)還沒(méi)有就該問(wèn)題做出法律上的規(guī)定,但為安全起見(jiàn),開(kāi)發(fā)具有防夾功能的車窗控制模塊是完全必要的。
參考了文獻(xiàn)后,本文的防夾設(shè)計(jì)方案采用將霍爾傳感器檢測(cè)電機(jī)轉(zhuǎn)速和檢測(cè)電機(jī)電流變化情況結(jié)合起來(lái)實(shí)現(xiàn)防夾功能,該方案避免了車窗防夾系統(tǒng)易受外界環(huán)境影響的缺陷,確保防夾效果可靠,成本較低,可以不必改動(dòng)傳統(tǒng)車門的生產(chǎn)工藝,在改造電動(dòng)車窗無(wú)防夾功能的老車型時(shí),可以不改變現(xiàn)在已成型的汽車車門的機(jī)械結(jié)構(gòu)和電路結(jié)構(gòu),只需替換電動(dòng)車窗升降控制器,十分方便。
1 電動(dòng)車窗防夾設(shè)計(jì)方案
所謂防夾,就是指在電動(dòng)車窗上升過(guò)程中夾住物體并達(dá)到一定力度后,讓電動(dòng)車窗自動(dòng)停止或回落,用以防止物體(尤其是人體)被夾傷。車窗的升降過(guò)程中,只有車窗上升階段需要進(jìn)行防夾控制,所定義的防夾區(qū)為從離電動(dòng)車窗玻璃無(wú)障礙上升運(yùn)動(dòng)的最大位置(頂端)4~200 mm的區(qū)域。該定義符合歐洲74/60/EEC和美國(guó)FMVSSll8的相關(guān)要求。只有在防夾區(qū)域才啟動(dòng)防夾功能。所以防夾設(shè)計(jì)首先應(yīng)該確定車窗的當(dāng)前位置。
1.1 車窗位置的確定
車窗控制電機(jī)的旋轉(zhuǎn)會(huì)帶動(dòng)鋼絲繩的運(yùn)動(dòng),從而控制車窗的上下移動(dòng)。在車窗移動(dòng)過(guò)程中,電機(jī)轉(zhuǎn)動(dòng)的圈數(shù)和車窗的運(yùn)動(dòng)距離成正比,電機(jī)轉(zhuǎn)子轉(zhuǎn)動(dòng)一周,會(huì)使霍爾傳感器產(chǎn)生方波脈沖信號(hào)。當(dāng)車窗從最低位置升到頂部過(guò)程中,可以通過(guò)MCU對(duì)霍爾傳感器輸出的脈沖信號(hào)進(jìn)行計(jì)數(shù),從車窗的最底端到最頂端,上下反復(fù)3次,取其平均值nth,作為標(biāo)定的基準(zhǔn),并記錄在E2PROM中。之后,軟件控制從車窗的最底端位置開(kāi)始運(yùn)行(此時(shí)為人工操控,車窗運(yùn)行到最底端,電機(jī)堵轉(zhuǎn)),且計(jì)數(shù)從零開(kāi)始,上升過(guò)程根據(jù)當(dāng)前的計(jì)數(shù)值進(jìn)行加計(jì)數(shù),下降過(guò)程根據(jù)當(dāng)前的計(jì)數(shù)值進(jìn)行減計(jì)數(shù)。因此,通過(guò)霍爾傳感器的脈沖輸出及計(jì)數(shù)方案可實(shí)時(shí)確定車窗的當(dāng)前位置,并根據(jù)歐洲74/60/EEC和美國(guó)FMVSSll8標(biāo)準(zhǔn)的規(guī)定確定車窗是否在防夾區(qū)域。對(duì)于本系統(tǒng),測(cè)量過(guò)程中脈沖計(jì)數(shù)的誤差可忽略不計(jì),對(duì)于長(zhǎng)期運(yùn)行中可能造成的誤差可用定期標(biāo)定的方式加以解決。
1.2 防夾方案的確定
本系統(tǒng)采用檢測(cè)電機(jī)電樞電流方式來(lái)確定車窗在上升過(guò)程中是否遇到障礙物,方案在具體實(shí)施過(guò)程中要解決如下問(wèn)題:
(1)確定防夾區(qū)域及車窗位置。遵照歐洲74/60/EEC和美國(guó)FMVSSll8標(biāo)準(zhǔn)確定出相應(yīng)的防夾區(qū)域及車窗位置。
(2)防夾時(shí)的電機(jī)電樞電流閾值ith的確定,即在防夾區(qū)域內(nèi)電流值上升到所設(shè)定的閾值后即認(rèn)為遇到障礙物,啟動(dòng)車窗防夾功能.這里存在的問(wèn)題是:車窗按鍵剛剛按下(無(wú)論是上升或下降),車窗電機(jī)剛剛啟動(dòng)時(shí),由于電機(jī)的反電動(dòng)勢(shì)還沒(méi)有建立,因而電流會(huì)有短時(shí)間的較大幅值,這時(shí)的電流幅值往往比所設(shè)定的防夾電流閾值還要大,需要將這種電流幅值較大的狀態(tài)和在車窗上升過(guò)程中遇到障礙物產(chǎn)開(kāi)來(lái)。車窗電機(jī)啟動(dòng)后延時(shí)50 ms后,再進(jìn)行電流檢測(cè),這樣可以避免電機(jī)啟動(dòng)初期電流瞬時(shí)過(guò)沖對(duì)防夾電流閾值設(shè)定的影晌。實(shí)際設(shè)計(jì)中,應(yīng)用一塊可用于診斷功能的中央控制器,配合武漢吉陽(yáng)光電公司生產(chǎn)的USB-CAN200工具,將運(yùn)行過(guò)程中的數(shù)據(jù)反饋到PC機(jī)上,以Excel表格方式呈現(xiàn),并可繪出圖形,進(jìn)而方便地定出閾值ith,并通過(guò)多次運(yùn)行試驗(yàn)確定合適的閾值。
(3)MCU和功率驅(qū)動(dòng)器件的選取。防夾方案中涉及到較多的實(shí)時(shí)檢測(cè)和實(shí)時(shí)計(jì)算,要求MCU的計(jì)算能力較高,方案中軟件的實(shí)現(xiàn)基于移植μC/OS-Ⅱ實(shí)時(shí)操作系統(tǒng)方案,因此選擇歐洲車系上流行的、性能較高的英飛凌XCl64CS MCU,功率驅(qū)動(dòng)芯片選擇具有故障診斷功能的BTS781芯片。
2 防夾系統(tǒng)硬件設(shè)計(jì)
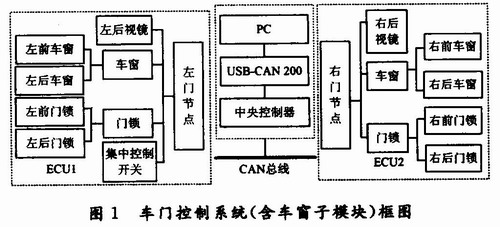
車門控制系統(tǒng)包括電動(dòng)車窗控制系統(tǒng)和電動(dòng)后視鏡控制系統(tǒng)兩部分,防夾電動(dòng)車窗是車門控制系統(tǒng)的一個(gè)子模塊,在整個(gè)車門控制系統(tǒng)中,采用了一種“總體分布,局部集中式”的控制方案,如圖1所示。即將左側(cè)前后兩個(gè)車門的控制作為一個(gè)ECU模塊,右側(cè)前后兩個(gè)車門的控制作為另一個(gè)ECU模塊,兩個(gè)模塊之間以及模塊與中央控制器之間均以CAN總線方式連接。
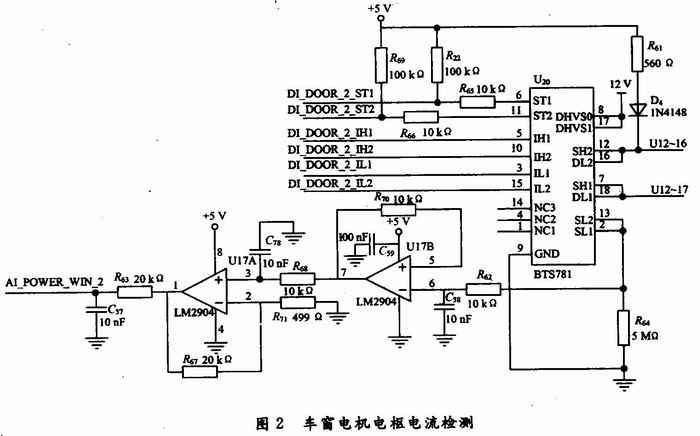
防夾系統(tǒng)硬件設(shè)計(jì)以BTS781為核心,通過(guò)ST1,ST2,IH1,IH2,IL1,IL2端口和微控制器XCl64CS芯片連接,接收微控制器發(fā)出的指令,來(lái)控制車窗的升降。通過(guò)在全橋驅(qū)動(dòng)芯片BTS781的2和13號(hào)引腳上串接一個(gè)5 mΩ的電阻R37來(lái)檢測(cè)電機(jī)電樞電流變化,經(jīng)過(guò)低通濾波和放大,送入MCU的A/D端口進(jìn)行采樣,如圖2所示。
車窗位置測(cè)定采用霍爾傳感器輸出脈沖計(jì)數(shù)的方式實(shí)現(xiàn)。采用英飛凌TLE4923霍爾傳感器,直接輸出方波信號(hào),經(jīng)低通濾波,將脈沖信號(hào)輸入MCU對(duì)其進(jìn)行計(jì)數(shù),進(jìn)而確定車窗的當(dāng)前位置,如圖3所示。

3 軟件設(shè)計(jì)
系統(tǒng)的軟件設(shè)計(jì)不但要考慮控制的方便性,也要考慮將來(lái)功能的擴(kuò)展性。因此,本系統(tǒng)的軟件設(shè)計(jì)基于實(shí)時(shí)操作系統(tǒng),即首先將μC/OS -Ⅱ?qū)崟r(shí)操作系統(tǒng)內(nèi)核移植到XCl64CS MCU上,之后將防夾車窗控制以其中的一個(gè)任務(wù)的方式添加上去。
3.1 μC/OS-Ⅱ?qū)崟r(shí)操作系統(tǒng)內(nèi)核移植
所做的移植,就是將μC/OS-Ⅱ?qū)崟r(shí)內(nèi)核移植到XCl64CS微控制器上。由于μC/OS-Ⅱ在讀寫(xiě)處理器寄存器時(shí)只能通過(guò)匯編語(yǔ)言來(lái)實(shí)現(xiàn),所以一些與處理器相關(guān)的代碼要用匯編語(yǔ)言寫(xiě),但大部分的μC/OS-Ⅱ代碼用C語(yǔ)言編寫(xiě)。移植工作主要使μC/OS-Ⅱ正確定義和使用XCl64C-S。具體請(qǐng)參考本文作者撰寫(xiě)的文章,此處不再贅述。
3.2 防夾電動(dòng)車窗軟件設(shè)計(jì)
在所設(shè)計(jì)的硬件平臺(tái)上將μC/OS-Ⅱ?qū)崟r(shí)操作系統(tǒng)移植后,將防夾電動(dòng)車窗控制以任務(wù)方式加入,并參照前文內(nèi)容實(shí)現(xiàn)防夾功能,其流程圖如圖4所示。

控制器XCl64CS上電啟動(dòng)時(shí),從E2PROM中讀取nth,ith等初始數(shù)據(jù),檢測(cè)電源電壓,當(dāng)電壓值平穩(wěn)后,讀取E2PROM中存儲(chǔ)的車窗位置,然后讀取按鍵輸入,如果有升降車窗操作,就設(shè)置對(duì)應(yīng)的開(kāi)關(guān)信號(hào)來(lái)驅(qū)動(dòng)芯片BTS781中的MOS管T1,T2,T3,T4。如果車窗向上運(yùn)動(dòng),計(jì)時(shí)器開(kāi)始計(jì)時(shí),霍爾傳感器脈沖信號(hào)加計(jì)數(shù),延時(shí)50 ms后,檢測(cè)電流值是否過(guò)流,在車窗上升過(guò)程中如果檢測(cè)到了過(guò)流信號(hào),即車窗電機(jī)的電流值大于電流閾值ith,而車窗位置又處于防夾啟動(dòng)區(qū)域,則判定車窗遇堵,控制器就輸出方向開(kāi)關(guān)信號(hào),通過(guò)MOS管T1,T2,T3,T4驅(qū)動(dòng)電機(jī)反轉(zhuǎn)1 s后停止,防夾操作完成。不論電機(jī)升降運(yùn)動(dòng),控制器都會(huì)通過(guò)計(jì)數(shù)程序記錄霍爾傳感器的脈沖信號(hào)數(shù),據(jù)此可判斷車窗的相對(duì)位置,并在需要時(shí)把該位置信息寫(xiě)入 E2PROM。
4 測(cè)試
通過(guò)完成硬件的制作和軟件的編程后,制作了實(shí)驗(yàn)臺(tái)架。對(duì)臺(tái)架進(jìn)行測(cè)試試驗(yàn)后,得到如圖5所示試驗(yàn)結(jié)果,將試驗(yàn)結(jié)果用Excel圖表繪制后如圖5右上側(cè)的曲線圖,用示波器實(shí)際測(cè)試的電流變化曲線圖如圖5右下側(cè)曲線圖所示。示波器實(shí)際測(cè)試曲線變化說(shuō)明如表1所示。

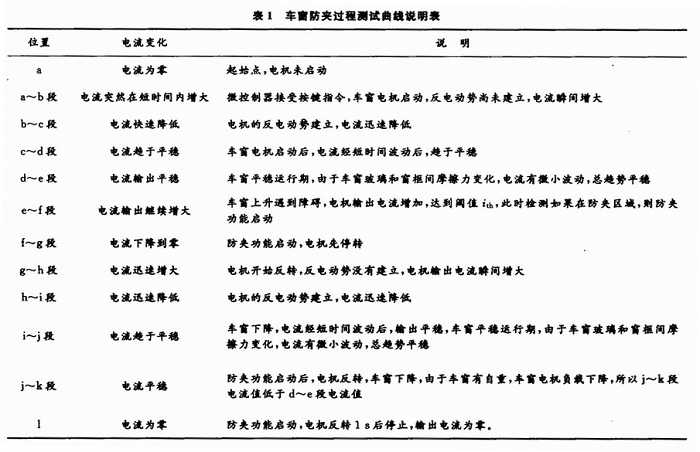
從圖5中可見(jiàn),測(cè)試結(jié)果繪制的圖形和示波器實(shí)際測(cè)試圖形相同,達(dá)到預(yù)期的防夾效果。
5 結(jié)語(yǔ)
闡述了一種電動(dòng)車窗的防夾設(shè)計(jì),在不改變?cè)邪惭b結(jié)構(gòu)基礎(chǔ)上實(shí)現(xiàn)了車窗的防夾功能。其關(guān)鍵是設(shè)計(jì)合適的電流檢測(cè)閾值,本研究在基于實(shí)驗(yàn)的基礎(chǔ)上給出了電流閾值,制作了測(cè)試臺(tái)架。測(cè)試結(jié)果表明,本文所做的設(shè)計(jì)可實(shí)現(xiàn)可靠的車窗防夾功能。