
摘? 要: 新一代電機控制" title="電機控制">電機控制嵌入式DSP芯片ADMC401的原理與結(jié)構(gòu),描述了其A/D轉(zhuǎn)換系統(tǒng)、脈沖寬度調(diào)制單元和光電編碼器" title="光電編碼器">光電編碼器接口單元等電機控制外設(shè)" title="外設(shè)">外設(shè)電路的獨特之處和應(yīng)用中的技術(shù)關(guān)鍵。還將ADMC401與其它國際主流產(chǎn)品相比較,并結(jié)合電機控制技術(shù)的發(fā)展趨勢,介紹了ADMC401在交流調(diào)速系統(tǒng)中的應(yīng)用。
關(guān)鍵詞: 嵌入式DSP? 電機控制? 交流調(diào)速
?
近年來,隨著現(xiàn)代電機控制技術(shù)的發(fā)展和電機驅(qū)動系統(tǒng)市場的繁榮,AD公司推出了ADMCxx系列電機控制嵌入式DSP。其中的ADMC401屬于高端產(chǎn)品,適合于工業(yè)控制、機床控制等高精度應(yīng)用。目前有一定數(shù)量的文獻涉及到ADMC401在電氣傳動中的應(yīng)用[1~3],但都側(cè)重于介紹傳動系統(tǒng)或者電機控制的算法,沒有從芯片的角度系統(tǒng)地介紹ADMC401的原理和特點。ADMC401具有一套完備的外圍控制接口和豐富的電機控制外設(shè)電路,將DSP的高速運算能力和外設(shè)電路的控制能力結(jié)合到一起,可以在高度集成環(huán)境中實現(xiàn)電機控制。本文將著重闡述ADMC401的原理和特點,并介紹它在工業(yè)控制中的應(yīng)用。
1 ADMC401的體系結(jié)構(gòu)
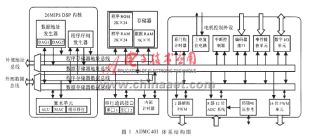
ADMC401的體系結(jié)構(gòu)圖如圖1所示,它主要由DSP內(nèi)核和存儲空間及電機控制外設(shè)電路組成。對全數(shù)字化高性能的電機控制來講,ADMC401最具特色的電機控制外設(shè)電路是它的片內(nèi)模/數(shù)轉(zhuǎn)換系統(tǒng)、脈沖寬度調(diào)制單元和光電編碼器接口單元。
?
?
1.1 DSP內(nèi)核和存儲空間
DSP內(nèi)核是ADMC401的“大腦”,它基于26MIPS定點ADSP-2171芯片。ADSP-2171芯片是AD公司ADSP-21xx家族的成員,其靈活的結(jié)構(gòu)和完整的指令集允許該處理器能并行執(zhí)行多種功能[4]。ADMC401被賦予了ADSP-2171的幾個系統(tǒng)級的特征,如內(nèi)存映射、中斷系統(tǒng)和低功耗運行等。
ADMC401的DSP內(nèi)核包含三個計算單元、兩個數(shù)據(jù)地址發(fā)生器和一個程序定序器。計算單元包含一個算術(shù)邏輯單元ALU、一個乘法-累加器[MAC]和一個桶式移位器。
ADMC401有2K×24bit的片內(nèi)程序存儲RAM、2K×24bit的片內(nèi)程序存儲ROM以及1K×16bit的數(shù)據(jù)存儲RAM。此外,ADMC401可以通過外部地址總線和外部數(shù)據(jù)總線擴展為14K×24bit的程序存儲空間和13K×16bit的數(shù)據(jù)存儲空間。
1.2 模/數(shù)轉(zhuǎn)換(ADC)系統(tǒng)
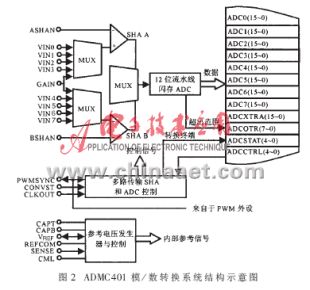
ADC系統(tǒng)在電機控制中扮演著重要的角色。它是控制器的“眼睛”,借助ADC系統(tǒng),控制器才可以監(jiān)視和調(diào)控電機的運行。ADMC401包含一個快速、高精度、多輸入的ADC系統(tǒng),工作模式十分靈活,其結(jié)構(gòu)示意圖如圖2所示。
?
?
ADMC401的ADC系統(tǒng)有8路專用模擬信號輸入,所有信號通過一個12bit的流水線閃速(Pipeline-Flash)模/數(shù)轉(zhuǎn)換內(nèi)核在2μs內(nèi)全部轉(zhuǎn)換完畢。整個系統(tǒng)在四分之一的系統(tǒng)時鐘頻率下工作,輸入的模擬電壓幅度可以達到4V(峰-峰值)。8路輸入被分為兩組,VIN0~VIN3為一組,VIN4~VIN7為一組。每組都有一個專門的輸入端,它連接到采樣保持放大器的反相輸入端,把模擬量輸入偏置到模/數(shù)轉(zhuǎn)換內(nèi)核正常的輸入范圍。
ADMC401的ADC系統(tǒng)有兩種工作模式——同步采樣" title="同步采樣">同步采樣模式和順序采樣模式。采用同步采樣模式時,VIN0和VIN4、VIN1和VIN5、VIN2和VIN6、VIN3和VIN7組成四對雙通道同步采樣輸入端,每一對模擬信號被同步采樣和保持。采用順序采樣模式時, 8路模擬信號在一個ADC時鐘周期(或四個DSP時鐘周期)內(nèi)被逐路采樣和保持。
該ADC系統(tǒng)有兩種起動模式——內(nèi)部命令起動模式和外部命令起動模式。內(nèi)部命令起動是在PWM同步脈沖(PWMSYNC)的上升沿開始A/D轉(zhuǎn)換;外部命令起動是在CONVST引腳出現(xiàn)上升沿時開始A/D轉(zhuǎn)換。兩種起動模式可以通過設(shè)置控制寄存器的值相互切換。
該ADC系統(tǒng)有兩種附加模式——偏置校正模式和增益校正模式,用于校正系統(tǒng)的偏置和增益,以增加整個系統(tǒng)的工作精度。
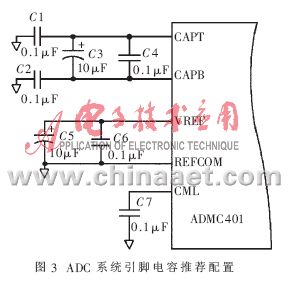
值得注意的是,在實際應(yīng)用中要恰當(dāng)配置與ADC系統(tǒng)相關(guān)引腳相連的電容,推薦配置如圖3所示,其中C3和C5是鉭電容,其余的是瓷片電容。
?
?
1.3 脈沖寬度調(diào)制(PWM)單元
確定優(yōu)化的PWM波形是所有的電機控制算法的目的所在。ADMC401具有靈活、簡便、高精度的PWM發(fā)生單元,輸出6路PWM信號(AH至CL),用以控制逆變器功率開關(guān)的動作。如圖4所示,PWM信號由四個功能模塊控制:三相PWM定時單元、輸出控制單元、門極驅(qū)動單元及PWM閉鎖控制器[5]。
?

?
PWM單元具有兩種不同的工作模式:單脈沖更新模式和雙脈沖更新模式。在單脈沖更新模式中,占空比在每個PWM周期只能更新一次。在雙脈沖更新方式中,占空比在每個PWM周期可以更新兩次,第二次更新在PWM周期的中點實現(xiàn)。雙脈沖更新模式可以產(chǎn)生不對稱的PWM信號,用于三相PWM逆變器中抑制高次諧波,也使得閉環(huán)控制器以更快的頻率改變電機繞組端的平均電壓,并獲得更快速的閉環(huán)帶寬。
在PWM單元中,可以設(shè)置PWM最小脈沖寬度。因為功率開關(guān)在導(dǎo)通" title="導(dǎo)通">導(dǎo)通和關(guān)斷轉(zhuǎn)換過程需要一定的時間,所以在逆變器電路中,要求加入死區(qū)時間以消除小于一定寬度的PWM信號,從而保證功率開關(guān)可靠通斷。ADMC401具有一個10bit的最小脈寬設(shè)置寄存器,用于設(shè)置最小脈寬門檻值TMIN。如果控制器檢測到某一PWM信號從導(dǎo)通到關(guān)斷的時間小于TMIN,那么該PWM脈沖就被刪除,并在整個PWM周期內(nèi)保持關(guān)斷狀態(tài),其互補信號則處于導(dǎo)通狀態(tài)。
在許多應(yīng)用場合,基極驅(qū)動電路必須采取隔離措施。通常有兩種隔離技術(shù):光電隔離器和脈沖變壓器。ADMC401的門極驅(qū)動單元具有足夠的直接驅(qū)動隔離器件的能力,而且能夠?qū)WM信號與高頻斬波信號相結(jié)合,便于同脈沖變壓器接口連接。
ADMC401可以用于控制交流電機、直流電機以及開關(guān)磁阻(SR)電機。SR電機的驅(qū)動方式比較特殊,因此,ADMC401的PWM單元包含了一種SR調(diào)制方式。在SR方式中,低側(cè)PWM信號總處于導(dǎo)通狀態(tài),與寫入控制寄存器的值無關(guān)。高側(cè)PWM信號仍由三個工作時間控制寄存器的值確定。利用輸出控制單元的交叉特性可以使高側(cè)或低側(cè)PWM信號始終處于ON狀態(tài)。
1.4 光電編碼器接口單元(EIU)
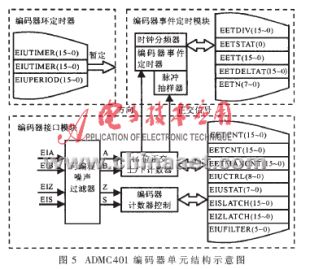
ADMC401內(nèi)置了一個功能強大的EIU,該單元用于高性能運動控制系統(tǒng)的位置(或速度)反饋,其結(jié)構(gòu)框圖如圖5所示。
?
?
EIU包括一個16位加/減計數(shù)器、一個可編程濾波器和一個零標(biāo)志器。正交編碼器信號加到引腳EIA和EIB,零標(biāo)志器輸入和閘門信號分別加到引腳EIZ和EIS上。當(dāng)在EIZ和EIS引腳上發(fā)生外部事件時,EIA和EIB在計數(shù)器中的值就被鎖存到專用寄存器EIZLATCH和EISLATCH中。EIU內(nèi)部設(shè)有可編程的噪聲濾波電路,以消除干擾脈沖對正交計數(shù)器正常工作的不良影響。EIU工作的時鐘頻率等于ADMC401的指令頻率,理想情況下,工作的最高頻率可達4.33MHz,相應(yīng)的最大正交信號頻率為17.3MHz。
在應(yīng)用EIU實現(xiàn)電機轉(zhuǎn)子的速度信號反饋時,可以采用T法(又稱測頻法),也可以采用M法(又稱測周法)。但由于光電編碼器制作工藝上的限制,其刻度不可能絕對均勻,有時偏差甚至達到30%,如果不加以軟件上的處理,將會大大影響測量精度。要克服光電編碼器刻度誤差的影響,在較大速度范圍內(nèi)得到高精度的轉(zhuǎn)子速度信號反饋,可以采用改進的T法[2]。
1.5 其它片內(nèi)外設(shè)
除了上述的ADC系統(tǒng)、PWM單元和EIU之外,ADMC401還集成了很多其它的片內(nèi)外設(shè)電路,包括兩個串行通訊接口、12路可編程數(shù)字I/O、內(nèi)置上電復(fù)位電路和兩路輔助PWM等等。這些外設(shè)與ADMCxx系列較早出現(xiàn)的其它芯片類似,如ADMC331和ADMC(F)32x等等。文獻[5]中對這些片內(nèi)外設(shè)電路做了較為詳細的介紹。
2 ADMC401的性能特點
在現(xiàn)代交流傳動系統(tǒng)中,由于采用模擬(或模擬數(shù)字混和)電路實現(xiàn)的方案有電路復(fù)雜、一致性差、零漂等問題,近年來,國外一些公司紛紛推出電機控制專用DSP芯片,使復(fù)雜的控制策略得以實現(xiàn),并且大大簡化了系統(tǒng)硬件結(jié)構(gòu),提高了系統(tǒng)的性能,代表著電氣傳動控制的發(fā)展方向。
目前,國際上的主流電機控制專用微處理器有AD公司的ADMCxx系列,TI公司的TMS320C(F)24x系列, Motorola公司的MC68HC16系列,Intel公司的MC96系列[6]。與其它系列的芯片相比,ADMC401比較突出的特點有:
(1)主頻較高,為26MIPS。
(2)采用并行體系結(jié)構(gòu),可在一個指令周期內(nèi)完成乘加運算,有利于高效求解電機系統(tǒng)數(shù)字控制的差分方程。
(3)其指令編碼與ADSP-21xxDSP系列和ADMC3xx系列完全兼容,具有良好的可移植性;增加了位操作、平方、四舍五入和全局中斷屏蔽等指令,有利于減小軟件的規(guī)模。
(4)內(nèi)部程序存儲器固化了矢量控制所必需的正余弦函數(shù)、CLARK和PARK變換及其逆變換等23個子程序,大大簡化了數(shù)字控制系統(tǒng)的軟件設(shè)計。
(5)專設(shè)了光電編碼器接口及相應(yīng)的計時器和寄存器。
(6)PWM發(fā)生單元的靈活性和可編程性能夠更好地滿足不同方式的PWM方案。
(7)有高速、高精度、多路輸入的ADC系統(tǒng),并且該ADC系統(tǒng)具有雙通道同步采樣能力。
(8)ADMC401還具備其它一些特點,以適應(yīng)工業(yè)應(yīng)用的要求,例如有3種程序引導(dǎo)模式、內(nèi)置上電復(fù)位電路以及低功耗運行模式等。
3 基于ADMC401的交流調(diào)速系統(tǒng)
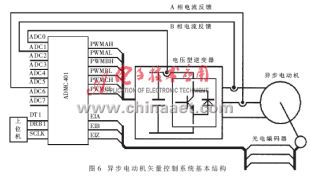
一個以ADMC401作為控制核心的異步電動機矢量控制系統(tǒng)的基本結(jié)構(gòu)如圖6所示。
?
?
在應(yīng)用中,ADMC401所實現(xiàn)的軟件功能主要包括:
(1)接收光電編碼器的信號,并依此計算電機的轉(zhuǎn)速。
(2)采集電機端電壓和線電流的瞬時值,用以實時估計電機的運行狀態(tài),如磁鏈的大小和角度、轉(zhuǎn)矩的大小和方向、電機的轉(zhuǎn)速和滑差等。
(3)根據(jù)負載的變化和指令信號的變化,按照某種調(diào)控規(guī)律產(chǎn)生PWM信號,控制逆變器的開關(guān)動作,從而對電機運行狀態(tài)進行調(diào)控。
(4)當(dāng)檢測到系統(tǒng)處于非正常運行狀態(tài)時,閉鎖PWM信號,對系統(tǒng)進行保護。
(5)與上位機的數(shù)據(jù)交換與通信。
???? 隨著工業(yè)界對節(jié)能、噪聲抑制及工藝精度的日益重視,許多工業(yè)產(chǎn)品都趨向于采用交流電機的變頻控制技術(shù),特別是性能優(yōu)越的矢量控制技術(shù)。矢量控制屬于計算密集型的控制方法,采樣控制周期短、控制算法復(fù)雜、而且檢測和計算精度高。作為新一代電機控制嵌入式DSP芯片,ADMC401完全可以勝任這些復(fù)雜精確的計算和控制任務(wù)。包括高性能電機控制在內(nèi),ADMC401的應(yīng)用已經(jīng)延伸到不間斷電源(UPS)、電能監(jiān)測、繼電保護等多個工業(yè)領(lǐng)域。針對ADMC401的強大的功能,AD公司及其第三方開發(fā)商都推出了相應(yīng)的評估套件,提供了調(diào)試硬件電路和軟件控制算法的工具,給開發(fā)人員帶來了極大的便利。
?
參考文獻
1 曹 坤,郝 奎,夏超英.ADMC401測速分析及實用算法.電氣自動化,2001(4)
2 郝 奎,曹 坤,夏超英.基于DSP的感應(yīng)電動機矢量控制系統(tǒng).電力電子技術(shù),2001;35[5]:42~44
3 伍兵芳,朱志紅,賈正春等.基于ADMC401的全數(shù)字伺服系統(tǒng)研究.微特電機,2002(1):24~25
4 譚茀娃,金如麟,李 川.電機控制專用? DSP講座——§2 DSP的結(jié)構(gòu)特點——ADSP21xx系列.微特電機,2001(3):41~44
5 譚茀娃,金如麟,李 川.電機控制專用DSP講座——§1?電機控制專用DSP概述.微特電機,2001(1):41~45
6 楊貴杰,崔乃政,王 強.集成DSP電機控制器ADMC331與TMS320C240的比較.微特電機,2000(4)