
引言
基于正弦波的永磁同步電動機(jī)(簡稱PMSM)具有功率密度大、效率高、轉(zhuǎn)子損耗小等優(yōu)點(diǎn),在運(yùn)動控制領(lǐng)域得到了廣泛的應(yīng)用。矢量控制" title="矢量控制">矢量控制主要采用脈寬調(diào)制(PWM)技術(shù)來控制輸出電壓并減小諧波。其中,SVPWM具有系統(tǒng)直流母線電壓利用率高、開關(guān)損耗小、電動機(jī)轉(zhuǎn)矩波動小等優(yōu)越性能,因此,PMSM的矢量控制已被證明是一種高性能的控制策略。
本文借助PMSM數(shù)學(xué)模型" title="數(shù)學(xué)模型">數(shù)學(xué)模型,分析了同步電動機(jī)的矢量控制原理和SVPWM調(diào)制方法,同時借助Matlab強(qiáng)大的仿真建模能力,構(gòu)建了SVPWM同步電動機(jī)矢量控制系統(tǒng)的仿真模型" title="仿真模型">仿真模型,并通過仿真實(shí)驗(yàn)予以驗(yàn)證。
1 PMSM數(shù)學(xué)模型
永磁同步電機(jī)" title="永磁同步電機(jī)">永磁同步電機(jī)的矢量控制基于電機(jī)的dqO坐標(biāo)系統(tǒng)。在建立數(shù)學(xué)模型前,可先作以下幾點(diǎn)假設(shè):即忽略鐵心飽和,不計(jì)渦流及磁滯損耗,轉(zhuǎn)子上沒有阻尼繞組,永磁材料的電導(dǎo)率為零,電機(jī)電流為對稱的三相正弦電流。在上述假設(shè)的基礎(chǔ)上,運(yùn)用坐標(biāo)變換理論,便可得到dqO軸下PMSM數(shù)學(xué)模型。
該模型的電壓、磁鏈、電磁轉(zhuǎn)矩和功率方程(即派克方程)如下:
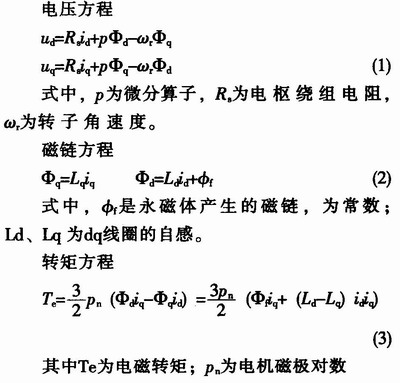
2 矢量控制系統(tǒng)
2.1 矢量控制基本原理
矢量控制的基本思想是在磁場定向坐標(biāo)上,將電流矢量分解成兩個相互垂直,彼此獨(dú)立的矢量id(產(chǎn)生磁通的勵磁電流分量)和iq(產(chǎn)生轉(zhuǎn)矩的轉(zhuǎn)矩電流分量),也就是說,控制id和iq便可以控制電動機(jī)的轉(zhuǎn)矩。
按轉(zhuǎn)子磁鏈定向的控制方法(id=0)就是使定子電流矢量位于q軸,而無d軸分量。此時轉(zhuǎn)矩Te和iq呈線性關(guān)系(由上轉(zhuǎn)矩方程),因此,只要對iq進(jìn)行控制,就可以達(dá)到控制轉(zhuǎn)矩的目的。既定子電流全部用來產(chǎn)生轉(zhuǎn)矩,此時,PMSM的電壓方程可寫為:
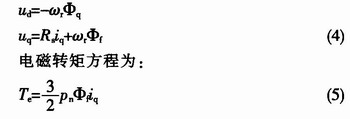
通過上面的簡化過程可以看出,只要準(zhǔn)確地檢測出轉(zhuǎn)子空間位置的θ角,并通過控制逆變器使三相定子的合成電流(磁動勢)位于q軸上,那么,通過控制定子電流的幅值,就能很好地控制電磁轉(zhuǎn)矩。此時對PMSM的控制,就類似于對直流電機(jī)的控制。
2.2 矢量控制調(diào)速系統(tǒng)的控制組成
在電機(jī)起動時,就應(yīng)當(dāng)通過軟件進(jìn)行系統(tǒng)初始定位,以獲得轉(zhuǎn)子的實(shí)際位置,這是永磁同步電機(jī)實(shí)現(xiàn)矢量控制的必要條件。首先,應(yīng)通過轉(zhuǎn)子位置傳感器檢測出轉(zhuǎn)子角位置ωr,同時計(jì)算出轉(zhuǎn)子的速度n,然后檢測定子(任兩相)電流并經(jīng)矢量變換,以得到檢測值id和iq,然后分別經(jīng)PI調(diào)節(jié)器輸出交直流軸電壓值ud和uq,再經(jīng)過坐標(biāo)變換后生成電壓值uα和uβ,最后利用SVPWM方法輸出6脈沖逆變器驅(qū)動控制信號。圖l所示是PMSM矢量控制原理圖。
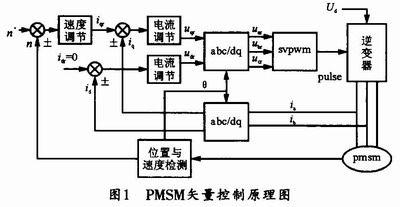
由圖1可知,由外環(huán)的轉(zhuǎn)速和內(nèi)環(huán)的電流環(huán)可以構(gòu)成PMSM的雙閉環(huán)控制系統(tǒng)。該控制系統(tǒng)中應(yīng)用了空間電壓矢量(SVPWM)脈寬調(diào)制技術(shù),由于SVPWM的開關(guān)損耗小、電壓利用率高、諧波少,因而大大提高了PMSM的調(diào)速性能。
3 SVPWM原理
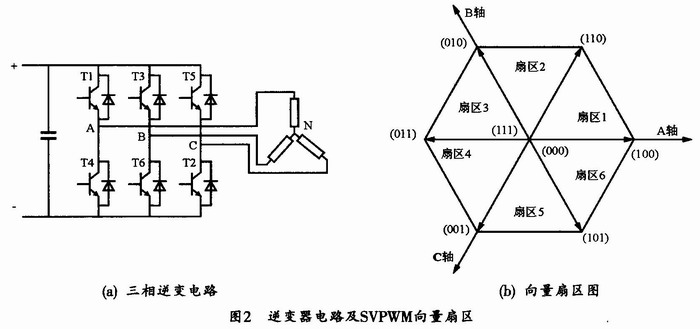
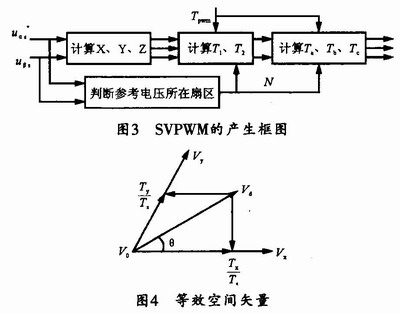
本文的矢量控制系統(tǒng)中的逆變器PWM采用的是電壓空間矢量脈寬調(diào)制(SVPWM)技術(shù)。SVPWM技術(shù)主要是從電機(jī)的角度出發(fā),它著眼于如何使電機(jī)獲得幅值恒定的圓形旋轉(zhuǎn)磁場(即正弦磁通)。三相負(fù)載相電壓可以用一個空間電壓矢量(目標(biāo)矢量)來代替。通過控制三相逆變器" title="三相逆變器">三相逆變器開關(guān)器件的通斷,可以得到用于合成目標(biāo)矢量的基本矢量。圖2所示是典型的三相逆變器電路及其SVPWM向量扇區(qū)圖。圖中引入了A、B、C橋臂的開關(guān)變量Sa、Sb、Sc,當(dāng)某橋臂的上管導(dǎo)通而下管關(guān)斷時,其開關(guān)變量值為1;當(dāng)下管導(dǎo)通,上管關(guān)斷時,開關(guān)變量值為0。因此,整個三相逆變器共有8種開關(guān)狀態(tài),即(SaSbSc)為(000)到(111),分別對應(yīng)逆變器的8種輸出電壓矢量,其中2種為零矢量,6種非零矢量可將平面分為6個扇區(qū)。圖3所示是產(chǎn)生SVPWM的具體實(shí)現(xiàn)步驟。其實(shí)現(xiàn)可通過Simulink模塊庫來搭建。
現(xiàn)以第一扇區(qū)為例來計(jì)算基本矢量的作用時間,其空間電壓矢量Vd的位置如圖4所示。假如在開關(guān)周期Ts內(nèi),矢量Vx、Vy、V0的作用時間分別為Tx、Ty、T0,則有:
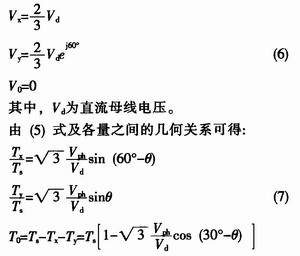
式(7)中,Vph為相電壓基波幅值,由(7)式可得到扇區(qū)中基本矢量Vx、Vy、V0的作用時間,并由此決定逆變器各開關(guān)狀態(tài)的作用時間。
4 仿真分析
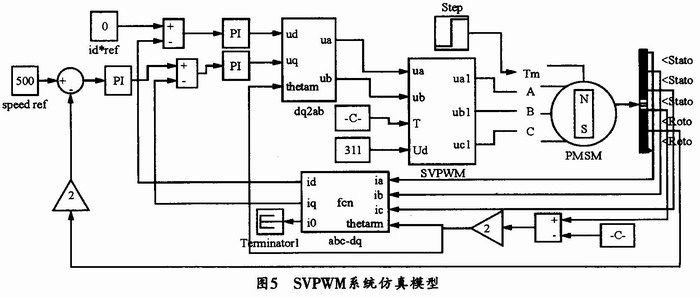
在MATLAB/simulink下所建立的該矢量控制系統(tǒng)的仿真模型如圖5所示。該系統(tǒng)采用雙閉環(huán)控制,外環(huán)為速度環(huán),內(nèi)環(huán)為電流環(huán)。仿真參數(shù)是:PMSM額定電壓為380 V,頻率為50 Hz,極對數(shù)p=2,Rs=2.85,縱軸和橫軸電感Ld=Lq=2.21mH,轉(zhuǎn)子磁通ψf=0.175Wb,三角載波周期T=0.0002s,幅值取T/2。直流側(cè)電壓Ud=310 V,轉(zhuǎn)速給定初始值為500 rad/s。
本實(shí)驗(yàn)的目的是觀察電機(jī)各輸出量隨轉(zhuǎn)矩指令值變化的動,靜態(tài)響應(yīng)。實(shí)驗(yàn)中,在給定參考轉(zhuǎn)速n=500rad/s的情況下,分別按轉(zhuǎn)矩TL=0進(jìn)行仿真,再按0~0.2s轉(zhuǎn)矩從TL=2 N·m突變到TL=10N·m的動態(tài)仿真。仿真實(shí)驗(yàn)所得到的電流、轉(zhuǎn)速和轉(zhuǎn)矩波形如圖6所示。
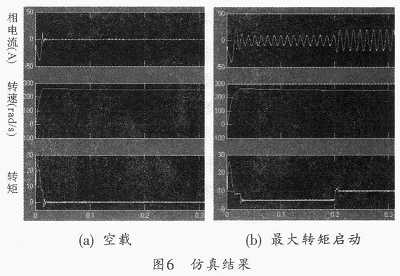
其中圖6(a)是空載運(yùn)行時的仿真結(jié)果,其穩(wěn)態(tài)電流、轉(zhuǎn)矩為0;圖6(b)是電機(jī)以最大轉(zhuǎn)矩啟動時的仿真結(jié)果,由圖可見,定子有短暫的沖擊電流,但穩(wěn)態(tài)電流波形較好,速度跟隨也較快。綜上所述可見,本實(shí)驗(yàn)具有轉(zhuǎn)矩脈動小、電流波形好、系統(tǒng)響應(yīng)迅速等優(yōu)點(diǎn)。
5 結(jié)束語
本文對永磁同步電機(jī)矢量控制的基本原理及SVPWM調(diào)制方式進(jìn)行了分析,并采用Matlab/simulink建立了該矢量控制系統(tǒng)的仿真模型,而且通過實(shí)驗(yàn)進(jìn)行了驗(yàn)證。仿真和實(shí)驗(yàn)結(jié)果表明,該控制系統(tǒng)具有動、靜態(tài)性能好,輸出電流正弦度高等優(yōu)點(diǎn),可為分析和設(shè)計(jì)PMSM控制系統(tǒng)提供有效的手段和工具,也為實(shí)際電機(jī)控制系統(tǒng)的設(shè)計(jì)和調(diào)試提供了新的思路。