摘 要:本文就一種DCS與PLC作為上下位機的分布式控制系統(tǒng),介紹基于Modbus協(xié)議的通信網(wǎng)絡(luò)在其中的應(yīng)用,以及該網(wǎng)絡(luò)的硬件構(gòu)成及程序設(shè)計。
關(guān)鍵詞:Modbus協(xié)議 分布式控制系統(tǒng) 通信網(wǎng)絡(luò) 串口通訊 可編程控制器
一、引 言
現(xiàn)代工業(yè)的迅速發(fā)展,不斷促進著自控技術(shù)及設(shè)備創(chuàng)新的日新月異。當前,DCS、IPC、PLC及智能儀表已廣泛應(yīng)用到工廠現(xiàn)場生產(chǎn)控制系統(tǒng)當中,并發(fā)展到由上述設(shè)備相互協(xié)同、共同面向整個生產(chǎn)過程的分布式工業(yè)自動控制系統(tǒng)。在此系統(tǒng)中,現(xiàn)場通信技術(shù)堪稱關(guān)鍵。但由于開始沒有統(tǒng)一的通信協(xié)議標準,各廠商自控產(chǎn)品通信協(xié)議各自為政,通信網(wǎng)絡(luò)各成體系,造成不同廠家的自控設(shè)備網(wǎng)絡(luò)連接困難甚至不能連接,給分布式控制系統(tǒng)的靈活應(yīng)用造成了不便。一些公司為適應(yīng)市場,紛紛將各自的協(xié)議標準公開化,可無償使用。經(jīng)過多年發(fā)展,一些通信協(xié)議如Modicon公司的Modbus通信協(xié)議因其兼容性、易用性的優(yōu)勢,在工業(yè)領(lǐng)域得到了廣泛應(yīng)用,已成為一種通用的工業(yè)通信標準。本文就某化纖項目分布式控制系統(tǒng)的設(shè)計,介紹基于Modbus協(xié)議的通信網(wǎng)絡(luò)在其中的應(yīng)用。
二、系統(tǒng)組成
1、系統(tǒng)結(jié)構(gòu)
本系統(tǒng)構(gòu)成如圖1,其中略去了現(xiàn)場儀表信號的采集、控制部分。系統(tǒng)上位機采用橫河CS3000型DCS集散控制系統(tǒng),對整個生產(chǎn)過程進行集中監(jiān)控;下位機采用Omron的CS1H系列PLC,分布在3個電氣控制室,負責(zé)現(xiàn)場電機、OCV閥、流量開關(guān)、變頻器等執(zhí)行、檢測機構(gòu)的啟停控制、反饋信號采集、故障判斷等操作。

基于通信實時性的考慮,將DCS與3個PLC控制站分為兩個相對獨立的通信網(wǎng)絡(luò):PLC1和PLC2與DCS一端口組成網(wǎng)絡(luò)一,PLC3與DCS二端口組成網(wǎng)絡(luò)二。由于上下位機均無面向同一協(xié)議的通信設(shè)備,給設(shè)計造成了困難。經(jīng)考慮,決定采用Modbus通信協(xié)議,由其構(gòu)成本分布式控制系統(tǒng)的通信網(wǎng)絡(luò)。
2、通信網(wǎng)絡(luò)組成
2.1通信協(xié)議
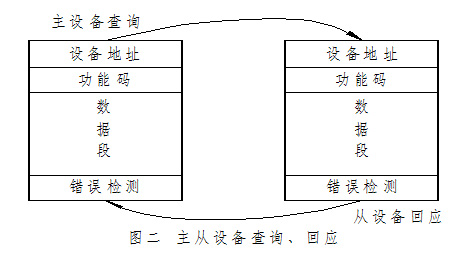
Modbus協(xié)議是一種適用于工業(yè)控制領(lǐng)域的主從式串口通訊協(xié)議,它采用查詢通訊方式進行主從設(shè)備的信息傳輸,可尋址1-247個設(shè)備地址范圍。協(xié)議包括廣播查詢和單獨設(shè)備查詢兩種方式,二者區(qū)別就是廣播查詢不需要從設(shè)備回應(yīng)信息,主從設(shè)備查詢通訊過程見圖二。
Modbus協(xié)議有兩種傳輸模式:ASCII模式和RTU模式。同波特率下,RTU模式較ASCII模式能傳輸更多的數(shù)據(jù),所以工業(yè)網(wǎng)絡(luò)大都采用RTU模式。RTU模式下的信息傳輸報文格式如圖三

它沒有起始位和停止位,而是由至少3.5個字符間隔時間作為信息的起始、結(jié)束標志。信息幀所有字符位由16進制字符0-9、A-F組成。本設(shè)計采用單獨設(shè)備查詢的RTU模式通信方式,根據(jù)系統(tǒng)構(gòu)成,將DCS一端口設(shè)01H、02H兩個PLC從站地址,二端口設(shè)01H一個PLC從站地址,并使用Modbus協(xié)議中的讀字存儲區(qū)03H和寫字存儲區(qū)06H兩個功能碼。
2.2 網(wǎng)絡(luò)構(gòu)成及硬件介紹
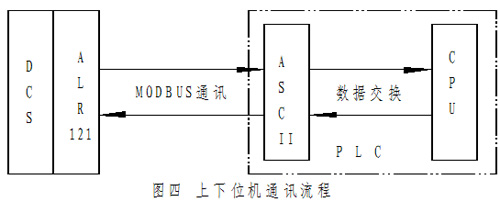
網(wǎng)絡(luò)采用RS485串行接口,通信媒體由4芯屏蔽電纜連接主從設(shè)備,傳輸距離最大達1.5Km,全雙工,串口設(shè)定波特率19200,8位數(shù)據(jù)位、偶校驗、1位停止位。DCS通信部分采用橫河型號為ALR121的通信模塊,并配套橫河提供的Modbus通信軟件包,該通信模塊最大通信數(shù)據(jù)容量4000字。PLC通信部分則采用Omron的C200H-ASCII 21可編程特殊單元模塊(以下簡稱ASCII模塊),該模塊支持BASIC語言編程,內(nèi)有200K字節(jié)的程序存儲區(qū),配備RS232、RS485通信串口各一個。通過對該模塊的編程,可實現(xiàn)與外圍設(shè)備的各種通信。本系統(tǒng)通過ASCII模塊與DCS基于Modbus協(xié)議的通信,將DCS的讀、寫指令及數(shù)據(jù)做相應(yīng)轉(zhuǎn)換,并與PLC的CPU單元進行數(shù)據(jù)存取交換,以實現(xiàn)上下位機控制信息的實時傳輸。如圖四所示。
三、軟件實現(xiàn)
1、 建立地址分配、對應(yīng)表
DCS人機監(jiān)控界面(HMI)上面向現(xiàn)場儀表的圖形符號對象的監(jiān)控,需通過DCS I/O物理地址對現(xiàn)場儀表信號的采集來實現(xiàn)。DCS對現(xiàn)場電氣執(zhí)行、檢測機構(gòu)的監(jiān)控,則是由DCS通信I/O地址與PLC I/O物理地址一一對應(yīng)完成的。為此,在編程前,需建立一張DCS通信I/O地址與PLC I/O地址的分配、對應(yīng)表。由于PLC邏輯控制編程需要,不便直接將PLC I/O物理地址與DCS通信I/O地址對應(yīng),故采取了間接地址的方式。具體設(shè)計采用PLC的數(shù)據(jù)存儲區(qū)DM區(qū)作為間接地址區(qū),與DCS通信I/O區(qū)建立聯(lián)系,再將DM區(qū)與PLC I/O區(qū)相對應(yīng)。如將DCS的%WB000101位通信I/O地址與D0000.00位地址對應(yīng),D0000.00再對照PLC的I0000.00位物理輸入點,就能將現(xiàn)場電氣執(zhí)行機構(gòu)的運行狀態(tài)反饋到HMI上。按照這種方法就建立了一張上下位機地址分配、對應(yīng)表,因篇幅所限,該表略。
2、程序設(shè)計
ASCII模塊支持BASIC語言編程,此外,又附加了多條系統(tǒng)及函數(shù)指令,如接收、發(fā)送緩沖區(qū)操作指令、信息傳輸差錯控制CRC、LRC校驗函數(shù)指令和與CPU單元數(shù)據(jù)交換的讀寫指令等。編程使用WINDOWS操作系統(tǒng)上附帶的Hyperterminal(超級終端)軟件,通過此軟件,PC機可與連接在網(wǎng)絡(luò)上的其它PC機或串口終端設(shè)備進行文本文件的傳輸及顯示。編程時,將PC機串口與ASCII模塊的RS232串口連接,運行該軟件,就能在其界面上對ASCII模塊進行程序編寫、上傳、下載和調(diào)試等工作。也可先通過WINDOWS系統(tǒng)的寫字板編寫程序,并保存為文本格式,然后再通過Hyperterminal將程序下載到ASCII模塊。通信程序的主工作流程見圖五。

部分程序代碼如下:
OPTION BASE 0 //定義數(shù)組
DIM R(128),FC(128)
R(48)=0:R(49)=1:R(50)=2:R(51)=3:R(52)=4:R(53)=5:R(54)=6:R(55)=7:R(56)=8
R(57)=9:R(65)=&h0a:R(66)=&h0b:R(67)=&h0c:R(68)=&h0d:R(69)=&h0e:R(70)=&h0f
R(97)=&h0a:R(98)=&h0b:R(99)=&h0c:R(100)=&h0d:R(101)=&h0e:R(102)=&h0f
OPEN #2,"COMU:19200,8,E,1" //設(shè)定串口參數(shù)
A%=LOC(2) //判斷接收緩沖區(qū)字符
IF A%=8 THEN
REX$=INPUT$(A%,#2)
……….
ENDIF
GOSUB *ZFCL //對信息進行分解處理
IF ST=1 THEN *JAOY ELSE *BACK //判斷是否本站信息
*JAOY
GOSUB *CRC //CRC循環(huán)冗余校驗子程序
IF R=CRC THEN *WORK ELSE *BACK //信息校驗正確判斷
*WORK
IF (FU=3) THEN GOTO *DJS //讀功能碼判斷,調(diào)寫操作子程序
IF (FU=6) THEN GOTO *XJS ELSE GOTO *BACK //寫功能碼判斷,調(diào)讀操作子程序
*DJS //讀子程序
………
*XJS //寫子程序
………
*CRC //CRC 校驗子程序
……….
*ZFCL //字符處理子程序
………
由于ASCII模塊支持ASCII碼,而RTU則是基于二進制碼的16進制字符通信方式,所以在程序編程中增加了碼制轉(zhuǎn)換程序。
CH5$=MID$(REX$,5,1) :CH6$=MID$(REX$,6,1) //提取字符段
VOL=ASC(CH5$)×256+ASC(CH6$) //將ASCII碼字符轉(zhuǎn)換十進制數(shù)
VOL$=HEX$(VOL) //將十進制數(shù)轉(zhuǎn)換成十六進制字符
3、程序優(yōu)化及安全措施
在ASCII模塊與CPU單元數(shù)據(jù)交換程序部分,采取由ASCII模塊向CPU 單元主動發(fā)送讀寫請求信號,CPU單元在收到請求時才執(zhí)行數(shù)據(jù)交換程序的方法。這樣,就縮短了PLC的掃描周期,提高了通信實時性。
在信息差錯控制部分,采用了CRC-16循環(huán)冗余校驗算法,該算法能使信息的差錯率低于10-14以下。如果信息校驗錯誤,程序?qū)⑶宄彌_區(qū),等待DCS信息重發(fā)。
根據(jù)生產(chǎn)需要,可在HMI上將現(xiàn)場按鈕等手控設(shè)備設(shè)為無效狀態(tài),所有手、自動操作均在DCS上進行。考慮到如通信網(wǎng)絡(luò)遭到癱瘓等嚴重故障時,需保證現(xiàn)場電氣設(shè)備正常啟停,又增加了通信狀態(tài)定時偵測程序,在規(guī)定時間(10秒)內(nèi)網(wǎng)絡(luò)上如無信號,PLC自動將現(xiàn)場按鈕等手控設(shè)備設(shè)為有效,同時DCS故障報警,直到網(wǎng)絡(luò)恢復(fù)正常為止。
四、結(jié)束語
當前分布式控制系統(tǒng)通信網(wǎng)絡(luò)的設(shè)備、軟件及整體架構(gòu),大部分是由專業(yè)廠商生產(chǎn)提供的,其總體性能較好。但如前所述,它們也有系統(tǒng)配置可選性小、網(wǎng)絡(luò)架構(gòu)適應(yīng)面窄、價格較高等缺點。筆者采用Modbus協(xié)議這一成熟通信技術(shù),選用PLC的可編程模塊,進行基于Modbus通信協(xié)議的自主程序設(shè)計,架構(gòu)起本自控系統(tǒng)的通信網(wǎng)絡(luò)。該網(wǎng)絡(luò)易擴展、易維護,具有結(jié)構(gòu)簡單、應(yīng)用靈活、編程方便、造價低廉等特點。這套系統(tǒng)在某化纖生產(chǎn)線一次投運成功,實際運行狀態(tài)良好,證明其穩(wěn)定可靠,能完全滿足系統(tǒng)設(shè)計要求。到目前為止,該系統(tǒng)已在多個工程項目上投入使用,全部運行正常,取得了良好的經(jīng)濟效益。
本文創(chuàng)新點:采用工業(yè)領(lǐng)域通用的Modbus通信協(xié)議標準,利用可編程的PLC特殊功能模塊,并進行通信程序設(shè)計,低成本的解決了本系統(tǒng)的通信架構(gòu)問題,可為分布式控制系統(tǒng)通信網(wǎng)絡(luò)兼容性設(shè)計的一個思路。
參考文獻:
1. Modicon. Modbus Protocol Reference Guide. 1996
2. Omron. C200H-ASCII UNITS Operation Manual. 1998
3. Omron. SYSMAC CS1 Series Programmable Controllers Operation Manual. 1999
4. 橫河CS3000 Reference Manual. 2001
5. 其其格 利用VC實現(xiàn)Modbus的兩種檢測方法 《微計算機信息》 2004.1
6. 劉東 循環(huán)冗余校驗CRC算法分析及程序?qū)崿F(xiàn). 《計算機與信息技術(shù)》2002.9
