
合成孔徑雷達(SAR)是主動式微波成像雷達,,近年來隨著合成孔徑雷達的高速發(fā)展,對作為重要部分的數(shù)據(jù)采集和存儲系統(tǒng)的要求越來越高,,比如對數(shù)據(jù)采集系統(tǒng)的采樣率,、分辨率、存儲深度,、數(shù)字信號處理速度,、抗干擾能力等方面提出更高要求。SAR系統(tǒng)的數(shù)據(jù)采集和存儲處理需要滿足正交兩路(I/Q)雷達回波信號數(shù)據(jù)同時采集,,并實現(xiàn)高速傳輸和大容量長時間實時存儲,。根據(jù)這一要求,結(jié)合采集存儲的發(fā)展趨勢,,設(shè)計并實現(xiàn)了一種應(yīng)用于SAR,,基于SATA硬盤的高速數(shù)據(jù)采集和存儲系統(tǒng)。采用FPGA實現(xiàn)系統(tǒng)工作時序控制,,DSP功能模塊完成信號的處理和對硬盤的操作,。該系統(tǒng)能夠?qū)崿F(xiàn)脫機,長時間,高速大容量的數(shù)據(jù)存儲,。
1 系統(tǒng)構(gòu)成及設(shè)計原理
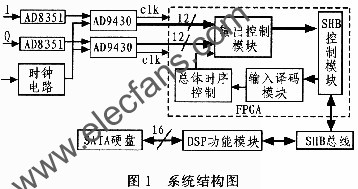
本系統(tǒng)由模數(shù)轉(zhuǎn)換模塊,、采集存儲控制模塊、DSP功能模塊和數(shù)據(jù)存儲器(硬盤)組成,。其中模數(shù)轉(zhuǎn)換模塊和采集存儲控制模塊位于電路板1,,數(shù)據(jù)存儲接口模塊位于電路板2,板間按照SHB接口協(xié)議通信,。系統(tǒng)實現(xiàn)思路為:首先采集正交輸出的I/O兩路模擬正交信號,,經(jīng)過并在雷達回波有效時間內(nèi)將數(shù)據(jù)送入DSP功能模塊轉(zhuǎn)化數(shù)據(jù)格式。在兩次回波有效窗的間隔時間內(nèi),,將數(shù)據(jù)存入SATA硬盤中,,系統(tǒng)結(jié)構(gòu)如圖l所示。
1.1 數(shù)據(jù)采集模塊
模數(shù)轉(zhuǎn)換模塊主要功能是:在120 MHz的采樣時鐘下,,將I/O兩路模擬正交信號轉(zhuǎn)換成12位數(shù)字信號,,送給后端的采集存儲控制模塊。該模塊由信號調(diào)理器和A/D轉(zhuǎn)換器2部分構(gòu)成,。信號調(diào)理器主要完成對輸入信號的幅度和共模電壓的調(diào)整,,A/D轉(zhuǎn)換器將調(diào)整后的模擬信號均勻采樣得到其量化的數(shù)字信號。根據(jù)系統(tǒng)要求,,運算放大器選用AD8351,,該器件是用于RF和IF頻段的低功耗差分運放,其輸出放大增益和差分共模電壓均可通過調(diào)整片外相應(yīng)電阻阻值實現(xiàn),。A/D轉(zhuǎn)換器選用AD9430,,該器件分辨率為12位,最高轉(zhuǎn)換速度為170百萬次/秒,,輸入信號模擬帶寬為710 MHz,,輸出模式可靈活配置。
1.2 采集存儲控制模塊
采集存儲控制模塊是整個系統(tǒng)運行控制的核心部分之一,,其內(nèi)部框圖如圖1的FPGA部分,。該采集控制模塊的主要功能是:前端采集的數(shù)字信號在輸出控制模塊的控制下(編碼等處理),經(jīng)SHB送到DSP功能模塊,,DSP通過基于紐曼-皮爾遜準則的滑窗檢測算法計算出有效信號的具體位置,,并得到這些參數(shù)(CalEnd、Start,、Hold,、Error、Pause,、Delay,、CalPRF,、PRF-INCRS和Full),然后經(jīng)過編碼將這些參數(shù)傳送給采集控制模塊,,采集控制模塊通過譯碼模塊,,恢復(fù)這些參數(shù)并通過這些參數(shù)控制時序,就可以采集信號的有效部分,。最后通過SHB把這些有效信號傳給DSP功能模塊,,存儲在SATA硬盤中。該采集存儲控制模塊的時鐘為120 MHz,。
根據(jù)設(shè)計要求,采集存儲控制模塊的最高工作頻率為240 MHz,,由于該模塊的主要功能是對系統(tǒng)中各子模塊的接口連接和控制,,所以其外部接口較多,還涉及到多電平模式間的轉(zhuǎn)換和兼容,。通過最后的仿真綜合分析,,本方案設(shè)計選用Virtex 4系列的FPGA器件XC4VFXl2。
如圖1中的FPGA框圖,,采集存儲控制模塊包括4個主要的功能模塊,,其中總體時序控制模塊是核心模塊。按照系統(tǒng)工作要求,,本系統(tǒng)設(shè)計并實現(xiàn)了如下工作:系統(tǒng)開機后,,外部硬件電路將對系統(tǒng)進行自動復(fù)位。復(fù)位信號有效后,,總體時序控制部分將進人狀態(tài)“0001”,,對總體時序控制所有參數(shù)進行初始化配置。參數(shù)配置結(jié)束后,,將自動從狀態(tài)“0001”跳轉(zhuǎn)至狀態(tài)“0010”,。狀態(tài)“0010”是總體時序控制部分的狀態(tài)跳轉(zhuǎn)中樞,該狀態(tài)根據(jù)譯碼產(chǎn)生的控制信號跳轉(zhuǎn)至相應(yīng)的下一個工作狀態(tài),。根據(jù)系統(tǒng)工作方案,,需要FPGA在接收到START(開始傳送數(shù)據(jù))信號后,向后端傳送單個完整的PRI內(nèi)的采樣信號,。此時CalEnd信號為系統(tǒng)初始化時,,所賦予的初始值‘0’。當FPGA接收到START信號后,,將檢測CalEnd是否為其初始值‘0’,,當條件“CalEnd=‘0’and START=‘1’”成立時,總體時序控制部分將從狀態(tài)“0010”跳轉(zhuǎn)至狀態(tài)“001 1”,??傮w時序控制部分跳轉(zhuǎn)至“0011”狀態(tài)后,,將在下一個PRF上升沿到來后,通過PCI輸出管理部分開啟SHB輸出通道,,傳送一個完整PRI內(nèi)的采樣數(shù)據(jù),。數(shù)據(jù)傳送完畢后,自動由狀態(tài)“0011”跳轉(zhuǎn)回狀態(tài)“0010”,,并關(guān)閉SHB輸出通道,。至此,F(xiàn)PGA對計算結(jié)束前接收的一次START命令執(zhí)行完畢,。當信號檢測部分一旦檢測到有效回波位未能完整落入采樣PRI內(nèi)時,,將通過SHB輸入端口向FPGA傳送DEIAY信號。在總體時序控制部分接收到輸入信號譯碼產(chǎn)生的DElAY信號后,,將在下一個PRF上升沿到來后,,由狀態(tài)“0010”跳轉(zhuǎn)至狀態(tài)“0100”,當延時完成后自動由狀態(tài)“0100”跳轉(zhuǎn)回狀態(tài)“0010”,。當信號檢測結(jié)束后,,后端模塊將通過SHB輸入單元把PRF延遲量傳送至FPGA,同時將總體時序控制中的Ca-lEnd信號置高,。當總體時序控制部分檢測到CalEnd信號為高時,,將在下一個PRF上升沿到來后,由狀態(tài)“0010”跳轉(zhuǎn)至狀態(tài)“0101”,。在狀態(tài)“0101”中,,根據(jù)計算的PRF延遲結(jié)果,對采樣PRF的位置進行一次延遲,。延遲結(jié)束后,,將自動跳轉(zhuǎn)至狀態(tài)“0110”。狀態(tài)“0110”中,??傮w時序控制部分將通過SHB輸出控制模塊關(guān)閉SHB通道。同時等待數(shù)據(jù)傳送開始信號START,。
2 DSP功能模塊
DSP功能模塊主要由SMT387模塊完成,。本設(shè)計利用TMS320C6415型DSP完成了對回波信號采集數(shù)據(jù)的分析處理,并為前端數(shù)據(jù)模塊提供相應(yīng)計算結(jié)果,,使信號采集模塊得以準確完成對回波信號的有效采集,。同時,利用SMT6087的文件操作系統(tǒng)將采樣數(shù)據(jù)轉(zhuǎn)換為FAT32文件系統(tǒng)下的數(shù)據(jù)格式,,并將數(shù)據(jù)存人SATA硬盤中,。
SMT387是一款專門用于數(shù)據(jù)硬盤存儲的DSP功能模塊。其主要特點有:
1)雙SATA硬盤接口,,采用Silicon Image Serial ATALink 3512;
2)600 MHz工作頻率的TMS320C6415DSP;
3)Virtex-ⅡPro FPGA;
4)1組60針的SHB接口;
5)8 MB的Flash為脫機工作提供配置,,其中數(shù)據(jù)傳輸采用的SHB協(xié)議是一種高速數(shù)據(jù)傳輸協(xié)議,,其傳輸速率可達240 MB/s。
SHB總線由兩組相互獨立的SunDance數(shù)據(jù)總線(SunDance Digital Bus,,SDB)單元SDBl和SDB2構(gòu)成,,每組SDB單元含有16根數(shù)據(jù)線,3根控制信號線WEN,,REQ,,ACK和1根時鐘線CLK。每組SDB單元均可獨立地配置為單向收發(fā)或雙向收發(fā)的工作模式,。
在本系統(tǒng)中,,采用滑窗檢測的方法對有效回波進行檢測?;皺z測器在PRI內(nèi)對N個采樣樣本點求平方和,,其檢測變量數(shù)學(xué)表達式:

式中,Gn為檢測變量的初始值;xi,,xj為A/D輸出采樣樣本點,i,,j=0為單個完整PRI內(nèi)采樣數(shù)據(jù)的起始點,,i,j=M-1為該PRI內(nèi)采樣數(shù)據(jù)的終止點;M為單個完整PRI內(nèi)采樣點總數(shù),,N為檢測滑窗寬度,。當Gj超過所設(shè)定門限β(Gj>β)時,則認為此時信號有效,。
根據(jù)輸出的噪聲采樣樣本點xi,,可計算得到xi的均值、方差和門限:

其檢測具體流程如下圖2所示,。

下面是DSP中的的部分代碼(其中很多函數(shù)是SMT6087操作系統(tǒng)自帶的):
3 測試結(jié)果
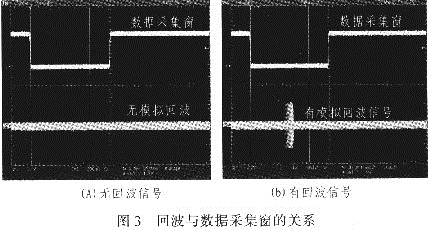
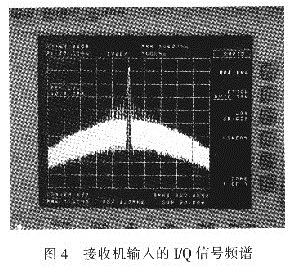
本系統(tǒng)的主要功能就是檢測有效信號的位置并對有效信號進行存儲,。測試方案:利用Tektronix AWG420信號源輸出30 MHz中頻,10 MHz帶寬,,10 us脈寬的線性調(diào)頻信號模擬實際工作中的線性調(diào)頻信號,。PRF為1 kHz,系統(tǒng)采樣率為120 MHz,。用示波器(Tektronix TDS505Z)進行觀察,,信號檢測結(jié)果如圖3所示,圖3(a)無輸入信號,,所以沒有有效回波信號,,只有數(shù)據(jù)采集窗;由圖3(b)可見,當有信號輸入時,,開機后數(shù)據(jù)采集窗迅速鎖定有效信號位置,,有效信號在采樣窗內(nèi),,說明DSP功能模塊正確地鎖定了信號的有效位置。圖4和圖5是整機現(xiàn)場測試結(jié)果,,輸入脈沖壓縮信號,。圖4是輸入的I/O信號頻譜,圖5是從硬盤中讀出的信號經(jīng)傅里葉變換后的頻譜,,因此本采集存儲系統(tǒng)能夠成功完成數(shù)據(jù)的采集和存儲功能,。

4 結(jié)論
該系統(tǒng)運用紐曼-皮爾遜準則的滑窗檢測算法檢測回波信號中有效信號的位置,達到只存儲有效信號,,大大降低了對存儲速度的要求,。該系統(tǒng)還設(shè)計了一套基于SMT6087操作系統(tǒng)的數(shù)據(jù)格式轉(zhuǎn)換軟件,可以不通過計算機直接將數(shù)據(jù)轉(zhuǎn)換為FAT32格式,,大大提高了系統(tǒng)在野外工作的能力,。但紐曼-皮爾遜準則存在一定漏檢概率,也就是會丟失一些有效信號,,使得采集的信號不夠完整,。為了提高存儲數(shù)據(jù)的準確性,設(shè)計一套完全不丟失數(shù)據(jù)的采集存儲系統(tǒng)其有重大意義,。