
0 引言
輪式小車是智能小車機(jī)械結(jié)構(gòu)的主體部分,由車身、輪子、速度傳感器、轉(zhuǎn)動(dòng)軸等結(jié)構(gòu)部件構(gòu)成。還包括提供動(dòng)力的驅(qū)動(dòng)器,采集環(huán)境信息的攝像頭等模塊,綜合實(shí)現(xiàn)收集小車的自身狀態(tài)信息或外部環(huán)境信息,并對(duì)傳感器的數(shù)據(jù)進(jìn)行分析、融合,動(dòng)態(tài)調(diào)整小車的運(yùn)動(dòng)狀態(tài),實(shí)現(xiàn)在一定條件下的自主尋跡行駛。
本智能車采用PID控制算法,使用CCD線型攝像頭作為黑色引導(dǎo)線的檢測(cè)設(shè)備,經(jīng)LM393比較后供單片機(jī)進(jìn)行數(shù)據(jù)采集,圖像識(shí)別,從而可以進(jìn)行路徑識(shí)別。電機(jī)驅(qū)動(dòng)采用的是PC33886,使用直射型光電傳感器" title="光電傳感器">光電傳感器來(lái)測(cè)量速度,并將相關(guān)信息顯示在LCD液晶顯示屏上,并采用4個(gè)按鈕按鍵進(jìn)行參數(shù)設(shè)定,為現(xiàn)場(chǎng)調(diào)試提供了友好的人機(jī)交互界面。
1 系統(tǒng)框架設(shè)計(jì)
整個(gè)車模系統(tǒng)可以分為三大部分:環(huán)境圖像采集" title="圖像采集">圖像采集部分、電機(jī)和舵機(jī)驅(qū)動(dòng)部分、中央數(shù)據(jù)處理部分,且采用16位微控器MC9S12DGl28B作為核心控制單元,系統(tǒng)框圖如圖1所示。
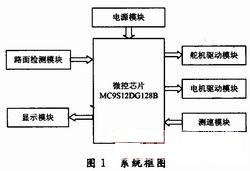
智能車的動(dòng)力部分使用的是常見的小型永磁式直流電機(jī)。這種電動(dòng)機(jī)的驅(qū)動(dòng)電路非常成熟,既有分離元件組成的驅(qū)動(dòng)器,也有一體化的功率集成驅(qū)動(dòng)芯片可供選用。
智能汽車最重要的部件,也就是智能汽車的大腦——中央處理系統(tǒng)。它不僅負(fù)責(zé)將環(huán)境圖像采集部分送來(lái)的圖像數(shù)據(jù)進(jìn)行處理,還要將這些信息轉(zhuǎn)化成為電機(jī)的驅(qū)動(dòng)控制信號(hào),使整車按照預(yù)定的規(guī)則前行,這就要求該系統(tǒng)具有龐大的數(shù)據(jù)處理能力。
2 路面檢測(cè)模塊
2.1 路面檢測(cè)方案比較及可行性分析
環(huán)境圖像采集部分可以采用陣列紅外探頭和CCD或CMOS圖像傳感器來(lái)實(shí)現(xiàn),前者的特點(diǎn)是價(jià)格低廉、電路簡(jiǎn)單、應(yīng)用方便,缺點(diǎn)是性能有限,對(duì)復(fù)雜環(huán)境的適應(yīng)能力較弱,效果較差。而CCD或COMS圖像傳感器(攝像頭)就能彌補(bǔ)陣列紅外探頭的各種缺點(diǎn)。
為了能快速采集圖像數(shù)據(jù)并且兼顧開發(fā)的難易程度,在此次設(shè)計(jì)中將采用輸出標(biāo)準(zhǔn)TV視頻信號(hào)的黑白監(jiān)控?cái)z像頭。這種攝像頭可以配合行、場(chǎng)同步信號(hào)" title="同步信號(hào)">同步信號(hào)分離電路和單片機(jī)自身的A/D轉(zhuǎn)換電路,可以將圖像方便地采集進(jìn)來(lái),從而回避數(shù)字型攝像頭復(fù)雜的總線協(xié)議和數(shù)據(jù)處理過程。
2.2 硬件設(shè)計(jì)
LM1881視頻同步信號(hào)分離芯片可以從攝像頭信號(hào)中提取信號(hào)的時(shí)序信息,LM1881的同步分離電路如圖2所示。
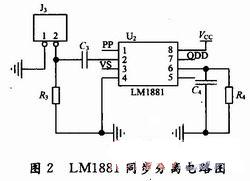
引腳2為視頻信號(hào)輸入端,攝像頭信號(hào)即由此輸入LM1881,引腳3為場(chǎng)同步信號(hào)輸出端,當(dāng)攝像頭信號(hào)的場(chǎng)同步脈沖到來(lái)時(shí),該端將變?yōu)榈碗娖剑话憔S持 230μs,然后重新變回高電平,引腳7為奇一偶場(chǎng)同步信號(hào)輸出端,當(dāng)攝像頭信號(hào)處于奇場(chǎng)時(shí),該端為高電平,當(dāng)處于偶場(chǎng)時(shí),為低電平。奇一偶場(chǎng)的交替處與場(chǎng)同步信號(hào)的下降沿同步,也就是和場(chǎng)同步脈沖后的上升沿同步。
3 速度傳感器
3.1 方案選擇
(1)霍爾傳感器配合稀土磁鋼
優(yōu)點(diǎn):獲取信息準(zhǔn)確、體積小、不增加后輪負(fù)載。
缺點(diǎn):齒輪出靠近主驅(qū)動(dòng)電機(jī),容易受磁場(chǎng)干擾,對(duì)齒輪打孔容易順壞齒輪。
(2)光電傳感器
優(yōu)點(diǎn):體積小、不增加后輪負(fù)載、反射型方案對(duì)原有器件不需要再加工。
缺點(diǎn):精度受到光電管體積的限制。
(3)光電編碼器
優(yōu)點(diǎn):獲取信息準(zhǔn)確、精度高。
缺點(diǎn):增加后輪負(fù)載、體積大。
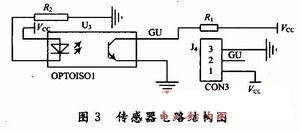
比較以上三種方案,考慮到系統(tǒng)的可靠性,主后輪轉(zhuǎn)動(dòng)齒輪為塑料質(zhì)地,打孔比較危險(xiǎn),而且車重的任何增加都有可能影響到車速,最終決定采用直射型光電傳感器。
3.2 硬件電路設(shè)計(jì)
傳感器電路結(jié)構(gòu)圖如圖3所示。
4 驅(qū)動(dòng)部分
4.1 電機(jī)驅(qū)動(dòng)器" title="電機(jī)驅(qū)動(dòng)器">電機(jī)驅(qū)動(dòng)器選擇
根據(jù)電機(jī)學(xué)和電力拖動(dòng)理論,電機(jī)驅(qū)動(dòng)器要有足夠的電流輸出能力來(lái)保證驅(qū)動(dòng)力的充足。綜合考慮,電機(jī)驅(qū)動(dòng)器采用一體化的專用功率驅(qū)動(dòng)集成電路進(jìn)行設(shè)計(jì)分離元件(場(chǎng)效應(yīng)管)構(gòu)成的驅(qū)動(dòng)器。
根據(jù)電機(jī)學(xué),直流電動(dòng)機(jī)轉(zhuǎn)速,n的表達(dá)式為:
式中:U為電樞端電壓;I為電樞電流;R為電樞電路中電阻;φ為每級(jí)磁通量;K為電動(dòng)機(jī)結(jié)構(gòu)參數(shù)。
由式(1)可知,直流電動(dòng)機(jī)的轉(zhuǎn)速控制方法可以分為兩大類:對(duì)勵(lì)磁磁通進(jìn)行控制的勵(lì)磁控制法和對(duì)電樞電壓進(jìn)行控制的電樞控制法。現(xiàn)在大多數(shù)應(yīng)用場(chǎng)合都使用電樞電壓控制法,本設(shè)計(jì)采用的是在保證勵(lì)磁恒定不變的情況下,采用PWM來(lái)實(shí)現(xiàn)直流電動(dòng)機(jī)的調(diào)速方法。
電動(dòng)機(jī)的電樞繞組兩端的電壓平均值U。為:

式中:占空比" title="占空比">占空比D表示在一個(gè)周期T里開關(guān)導(dǎo)通的時(shí)間與周期的比值,D的變化范圍為0≤D≤1。由式(2)可知,當(dāng)電源電壓Us不變的情況下,電樞兩端電壓的平均值Uo取決于占空比D的大小,改變D值也就改變了電樞兩端電壓的平均值,從而達(dá)到控制電動(dòng)機(jī)轉(zhuǎn)速的目的,即實(shí)現(xiàn)PWM調(diào)制。
為了便于取材和設(shè)計(jì)方便,此次設(shè)計(jì)選擇了飛思卡爾半導(dǎo)體公司的PC33886。PC33886在PWM調(diào)速模式驅(qū)動(dòng)下可以接受20 kHz的工作頻率;具有過熱、過流、短路保護(hù),并且通過一條反饋線將器件的工作狀態(tài)反饋給單片機(jī)。
4.2 舵機(jī)控制
舵機(jī)控制程序流程圖如圖4所示。
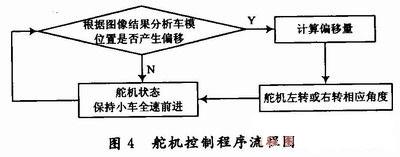
車模在行駛過程中不斷采樣路況信息,并通過分析車模與賽道相對(duì)位置判斷車模所處路況,計(jì)算轉(zhuǎn)彎半徑。所有舵機(jī)標(biāo)準(zhǔn)PWM周期為20 ms,轉(zhuǎn)動(dòng)角度最大為90°,當(dāng)給舵機(jī)輸入脈寬為0.5 ms,即占空比為O.5/20=2.5%的調(diào)制波時(shí),舵機(jī)右轉(zhuǎn)90°。可以推導(dǎo)出轉(zhuǎn)動(dòng)角度與脈寬的關(guān)系計(jì)算公式為:
t=1.5±θ/90
式中:t為正脈沖寬度,單位:ms;θ為轉(zhuǎn)動(dòng)角度;當(dāng)左轉(zhuǎn)時(shí)取加法計(jì)算,右轉(zhuǎn)時(shí)取減法計(jì)算。
在具體操作中PWM調(diào)制波的周期可以設(shè)置在20 ms左右一定范圍內(nèi)均可以使舵機(jī)正常轉(zhuǎn)動(dòng),經(jīng)反復(fù)測(cè)試最終把輸出PWM調(diào)制波周期設(shè)為13 ms。
運(yùn)行電機(jī)的轉(zhuǎn)速以及舵機(jī)的轉(zhuǎn)角,在軟件上都是通過對(duì)PWM波占空比進(jìn)行設(shè)置來(lái)相應(yīng)控制的。
5 電源模塊
電機(jī)驅(qū)動(dòng)系統(tǒng)要求大功率的電源供應(yīng):低內(nèi)阻、大電流、對(duì)電源的紋波不敏感;單片機(jī)和圖像采集系統(tǒng)對(duì)電源質(zhì)量要求較高:低內(nèi)阻、波紋小、自身功耗不大,但要嚴(yán)防電動(dòng)機(jī)在工作時(shí)產(chǎn)生的干擾。供電系統(tǒng)框圖如圖5所示。

由于攝像頭需要一個(gè)9~12 V的電壓才能正常工作,而充電電池的電壓只有6~7.2 V。所以DC-DC升壓電路便成為必須。
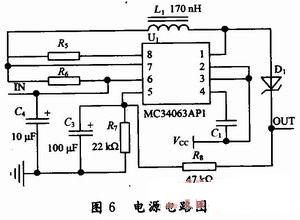
DC-DC電壓變換采用MC34063A集成電路,該器件內(nèi)部集成了溫度補(bǔ)償器、比較器、動(dòng)態(tài)電流帶限占空比可控的振蕩器和一個(gè)高電流輸出驅(qū)動(dòng)器。輸出電壓直接由兩個(gè)外接的誤差為2%的電阻控制。該電路可以方便地應(yīng)用于升壓和降壓兩種場(chǎng)合,電路原理圖如圖6所示。
6 軟件設(shè)計(jì)
軟件結(jié)構(gòu)圖如圖7所示。
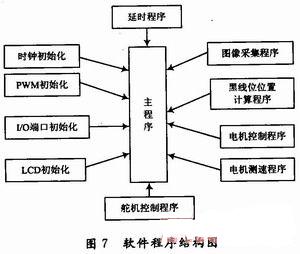
整個(gè)小車自動(dòng)識(shí)別控制過程都是通過主控單片機(jī)芯片上的程序控制來(lái)完成整個(gè)智能控制過程。小車開啟后將自動(dòng)沿著有一定寬度的黑線軌道行駛,行駛中將連續(xù)檢測(cè)到的黑線位置信息反饋給主控芯片,通過主控芯片處理后將執(zhí)行結(jié)果反饋給控制器,進(jìn)而控制小車前行方向,并通過軟件檢測(cè)小車速度及按鍵的更改信息最終將結(jié)果通過LCD顯示屏顯示。
7 結(jié)語(yǔ)
智能車設(shè)計(jì)涉及控制、模式識(shí)別、傳感器技術(shù)、汽車電子、電氣、計(jì)算機(jī)、機(jī)械等專業(yè)領(lǐng)域。整個(gè)設(shè)計(jì)沒有采用過于復(fù)雜的檢測(cè)方法或控制算法,而是采用了攝像頭圖像處理技術(shù)和經(jīng)典PID控制算法,這樣不但能保證系統(tǒng)的可靠性、穩(wěn)定性與快速性,而且節(jié)省了成本與工作量。在控制算法上,PID控制保證了系統(tǒng)的快速和穩(wěn)定;在檢測(cè)方法上,攝像頭連續(xù)檢測(cè)的設(shè)計(jì),保證了高速直線行駛的無(wú)抖動(dòng),以及光電管測(cè)速方法的應(yīng)用,保證了測(cè)速系統(tǒng)的簡(jiǎn)單可靠。