0 引言
近年來,道路交通量急劇增加,,城市道路問題已經(jīng)成為現(xiàn)代城市迫切需要解決的重要問題之一,,合理的控制策略能夠提高交叉口的通行能力,對于一些交通流量較小,,但隨機(jī)波動(dòng)較大的路口,,宜采用感應(yīng)控制。
經(jīng)典的感應(yīng)控制采用車來即延時(shí)的策略,,根據(jù)經(jīng)驗(yàn)設(shè)定固定的初始綠燈時(shí)間,、單位綠燈延長時(shí)間、最大綠燈時(shí)間等參數(shù),,控制策略單一,,很難適應(yīng)動(dòng)態(tài)的交通流狀況。為了達(dá)到比較理想的控制效果,,一些學(xué)者對感應(yīng)控制的配時(shí)進(jìn)行了深入研究,,翟潤平等就對延時(shí)策略進(jìn)行了改進(jìn),通過計(jì)算綠時(shí)有效利用率來確定是否切換相位,,提高了綠燈的有效利用率,,但是增加了一個(gè)控制參數(shù)和控制的復(fù)雜度;王殿海等提出了一種可變單位綠燈延時(shí)的時(shí)間模型,,考慮到了城市路段車流到達(dá)規(guī)律和駕駛員心理特性,,比傳統(tǒng)的固定單位綠燈延時(shí)有所改進(jìn),但是在降低車輛的平均延誤上效果并不明顯,;邵峰等對兩種單位綠燈延時(shí)的計(jì)算方法進(jìn)行了比較,,得到了一種減少車輛平均延誤的單位綠燈延時(shí)的計(jì)算方法,但是其計(jì)算參數(shù)過多,,計(jì)算復(fù)雜,,實(shí)用性不強(qiáng)。上述研究皆對感應(yīng)控制的部分配時(shí)參數(shù)進(jìn)行了研究,但都采用固定周期,、固定相序的方式,。文獻(xiàn)均考慮到了相序?qū)徊婵谕ㄐ心芰Φ挠绊懀瑢Σ煌慕徊婵诓捎貌煌南嘈蚍桨?,但是沒有考慮交叉口的車流量變化對相序的影響,;沈國江等提出了一種交通流模型,根據(jù)排隊(duì)長度的變化,,采用模糊推理對相序轉(zhuǎn)換時(shí)刻,、相序的選擇進(jìn)行了優(yōu)化,由于采用了八相位方案,,算法復(fù)雜度較高,,調(diào)節(jié)參數(shù)多,實(shí)時(shí)性和可靠性得不到保證,,并且增加了綠燈損失時(shí)間,;樊曉平等結(jié)合了模糊控制和神經(jīng)網(wǎng)絡(luò)控制的優(yōu)點(diǎn),實(shí)現(xiàn)了交叉口多相位的,、相序可變的交通流控制,,但是該方法對信號機(jī)系統(tǒng)的配置要求比較高,較難推廣應(yīng)用,。
本文對交通感應(yīng)控制中的信號配時(shí)進(jìn)行了研究,,提出一種動(dòng)態(tài)相序的多相位感應(yīng)控制算法,分析了初始綠燈時(shí)間,、單位綠燈延長時(shí)間,、最小和最大綠燈時(shí)間等對感應(yīng)控制的影響,并給出了上述參數(shù)配時(shí)的計(jì)箕方法,。本文所提算法簡單實(shí)用,,計(jì)算復(fù)雜度低,對系統(tǒng)配置要求不高,,仿真結(jié)果表明,,本文的方法較經(jīng)典感應(yīng)控制方法降低了交叉口的平均延誤,是一種有效可行的方法,。
1 感應(yīng)控制原理概述
感應(yīng)控制是通過車輛檢測器檢測到的車輛到達(dá)情況,,動(dòng)態(tài)調(diào)整各相位的配時(shí)以適應(yīng)交通變化的一種實(shí)時(shí)控制方式,是一種典型的反饋控制過程,,適用于交通流量不大但波動(dòng)較大的交叉口控制,。
傳統(tǒng)的感應(yīng)控制方式可分為半感應(yīng)控制和全感應(yīng)控制。在半感應(yīng)控制中,,檢測器只安裝在次干道上,,主干道維持綠燈狀態(tài),,當(dāng)次干道檢測到有車到達(dá)并且主干道最小綠時(shí)已經(jīng)結(jié)束時(shí),更換信號相位,;而全感應(yīng)控制中,,主從干道無法明顯地區(qū)分,交叉口的所有進(jìn)口道上都安裝檢測器,,其工作方式為:當(dāng)某一信號相位開始啟亮綠燈時(shí),,則預(yù)設(shè)一個(gè)“初始綠燈時(shí)間”,當(dāng)初始綠燈時(shí)間結(jié)束時(shí),,再增加一個(gè)預(yù)置的時(shí)間間隔(一般為一個(gè)單位綠燈延長時(shí)間),,在此時(shí)間間隔內(nèi),若沒有后續(xù)車輛到達(dá),,則立即更換相位,;若檢測器檢測到有后續(xù)車輛到達(dá),則每檢測到一輛車,,就從檢測到車輛的時(shí)刻起,,相位綠燈延長一個(gè)預(yù)置的“單位綠燈延長時(shí)間”,綠燈可一直延長到一個(gè)預(yù)置的“最大綠燈時(shí)間”,,當(dāng)相位綠燈時(shí)間延長到最大值時(shí),則強(qiáng)制切換相位,。
感應(yīng)信號控制的三個(gè)基本參數(shù)分別為:最小綠燈時(shí)間,、單位綠燈延長時(shí)間、最大綠燈時(shí)間,。而檢測器的埋設(shè)位置,、相位相序的選擇也對感應(yīng)控制的控制效果有重要的影響。
2 感應(yīng)控制主要參數(shù)的配時(shí)計(jì)算方法
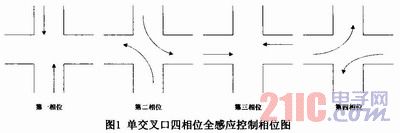
本文主要研究單個(gè)交叉口的四相位全感應(yīng)控制方法,。為了達(dá)到較好的控制效果,,就必須對感應(yīng)控制的主要參數(shù)進(jìn)行合理的配時(shí),如圖1所示,,圖中箭頭表示該相位允許通過的車流方向,,規(guī)定所有右轉(zhuǎn)車輛可自由通行??紤]到車流的動(dòng)態(tài)變化,,設(shè)計(jì)出一種動(dòng)態(tài)相序的控制算法,并對初始綠燈時(shí)間,、綠燈延長時(shí)間,、最小和最大綠燈時(shí)間給出了計(jì)算方法。
2.1 初始綠燈時(shí)間G0
經(jīng)典的感應(yīng)控制通常采用固定初始綠燈時(shí)間,,本文為了提高交叉口的通行能力,,采用初始綠燈時(shí)間可變的方法,,即在第i相位獲得通行權(quán)的時(shí)刻,檢測檢測器與停車線之間的車輛排隊(duì)長度Qi,,初始綠燈時(shí)間是使Qi輛車全部駛離停車線所需要的時(shí)間,,有:
![]()
其中,Qi為i相位獲得通行權(quán)的時(shí)刻關(guān)鍵進(jìn)口道上檢測器與停車線之間的排隊(duì)車輛數(shù),,單位為輛,;Si為i相位關(guān)鍵進(jìn)口道上的飽和流量,其單位為輛/小時(shí),;
2.2 單位綠燈延長時(shí)間
各相位的單位綠燈延長時(shí)間要保證車輛按進(jìn)口道的行駛速度行駛時(shí),,能夠行駛完檢測器到停車線之間的距離,保證車輛在該延時(shí)內(nèi)能夠順利通過停車線,,即滿足:
![]()
其中,,Di為i相位關(guān)鍵進(jìn)口道上檢測器與停車線之間的距離,m,;Vi為i相位關(guān)鍵進(jìn)口道上車流的平均行駛速度,,m/s;
2.3 最小綠燈時(shí)間
最小綠燈時(shí)間是信號相位獲得通行權(quán)時(shí)所必須保證的綠燈時(shí)間,,等于初始綠燈時(shí)間與單位綠燈延時(shí)之和,,最小綠燈時(shí)間有:
![]()
其中:Gi0為i相位的初始綠燈時(shí)間,s,;△i為湘位的單位綠燈間隔時(shí)間,,s。
2.4 最大綠燈時(shí)間Gmax
最大綠燈時(shí)間,,即為了保持最佳綠信比分配而確定的相位綠燈時(shí)間,。它是相位綠燈時(shí)間的延長極限。當(dāng)?shù)竭_(dá)最大綠燈時(shí)間時(shí),,強(qiáng)制綠燈結(jié)束并改變相位,,最大綠燈時(shí)間一般定為30-60s,可根據(jù)經(jīng)驗(yàn)來設(shè)定,。
3 檢測器的布局
本文采用在所有進(jìn)口道都埋設(shè)一對檢測器的方法,,以檢測各車道的車輛到達(dá)情況和排隊(duì)長度,如圖2所示,,其中一組檢測器設(shè)置在剛剛越過停車線的位置,,另一組檢測器設(shè)置在停車線下游離停車線距離為Di的位置,Di的設(shè)置位置要保證在最小流量時(shí)車輛的排隊(duì)長度不越過檢測器,,并且要保證檢測器與停車線之間的最大排隊(duì)車輛數(shù)能夠在初始綠燈時(shí)間內(nèi)疏散完畢,,于是檢測器與停車線之間的距離Di應(yīng)滿足:
![]()
其中:hi為i相位排隊(duì)車輛平均車頭間距,m,;Qi為i相位關(guān)鍵進(jìn)口道上檢測器與停車線之間的最大排隊(duì)車輛數(shù),,輛,。

4 變相序的多相位感應(yīng)控制算法
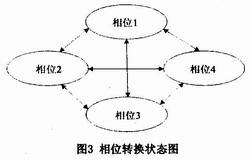
為了有效減小車輛平均延誤,本文針對前文所述的單交叉口四相位全感應(yīng)控制提出可變相序的感應(yīng)控制算法,,根據(jù)各相位的排隊(duì)長度和平均等待時(shí)間確定一個(gè)優(yōu)先值Wi,,Wi=QiTi;其中,,Qi為第i相位等待車輛的排隊(duì)長度,,T為第i相位的等待時(shí)間;顯然,,優(yōu)先值越大的相位優(yōu)先通行,,通過判斷優(yōu)先值的方法靈活動(dòng)態(tài)地變換相位,該配時(shí)方案的相序不固定,,相位轉(zhuǎn)換的狀態(tài)圖如圖3所示,,根據(jù)交通需求實(shí)時(shí)變換相位。
具體算法如下:
Step 1初始化,,給每一相位任意車輛排隊(duì)長度,,把通行權(quán)交給排隊(duì)長度最長的相位;
Step 2給獲得通行權(quán)的相位一個(gè)初始綠燈時(shí)間,;
Step 3給本相位一個(gè)單位綠燈延長時(shí)間,。
Step 4檢測本相位是否有車到達(dá),無車,,到Step5,,有車,判斷本相位綠燈時(shí)間是否到達(dá)最大綠燈時(shí)間,,是,,到Step5,,否,,到Step3。
Step 5計(jì)算各紅燈相位的優(yōu)先值,,把通行權(quán)交給優(yōu)先值最高的那個(gè)相位,,到Step2;
5 仿真結(jié)果分析
為了驗(yàn)證本文所提出的算法的有效性,,本文通過仿真平臺(tái)上對經(jīng)典感應(yīng)控制算法和本文提出的動(dòng)態(tài)相序的感應(yīng)控制算法進(jìn)行了比較實(shí)驗(yàn),,仿真軟件采用微觀交通仿真軟件-USTCMTS1.0系統(tǒng),因?yàn)楦袘?yīng)控制只適用于飽和度不高的交通流條件,,故取飽和度低于0.6的情況進(jìn)行實(shí)驗(yàn),,仿真所選取的交叉路口的寬度為:東西方向和南北方向的道路寬度均為10.5m,仿真運(yùn)行6000s,,以車輛的平均延誤作為標(biāo)準(zhǔn),,得到兩種算法的平均延誤,,圖4是根據(jù)仿真結(jié)果使用MATLAB所繪制的圖形。

由仿真結(jié)果我們可以看出,,本文所提出的動(dòng)態(tài)相序的感應(yīng)控制的平均延誤要明顯低于經(jīng)典感應(yīng)控制的平均延誤,。
6 結(jié)論
本文以單交叉口的感應(yīng)控制為研究背景,針對經(jīng)典感應(yīng)控制算法相序固定,、配時(shí)參數(shù)固定的缺點(diǎn),,提出一種變相序的、動(dòng)態(tài)初始綠燈時(shí)間的多相位感應(yīng)控制算法,,仿真結(jié)果表明,,改進(jìn)后的感應(yīng)控制算法較經(jīng)典的感應(yīng)控制算法有效地降低了車輛的平均延誤,能夠適應(yīng)動(dòng)態(tài)的交通流狀況,。
