
DSP對(duì)數(shù)字信號(hào)和數(shù)值算法具有強(qiáng)大的運(yùn)算處理能力,因而在信號(hào)采集與處理中被廣泛應(yīng)用,但其在任務(wù)管理、實(shí)時(shí)控制、人機(jī)交互等方面不占優(yōu)勢。而ARM微控制器則控制功能強(qiáng)大,可以加載嵌入式操作系統(tǒng),且能夠提供良好的人機(jī)交互、任務(wù)管理、網(wǎng)絡(luò)通信等方面功能。因此,發(fā)揮DSP和ARM處理器各自的優(yōu)勢,采用ARM+DSP結(jié)構(gòu)的設(shè)計(jì)方案已成為嵌入式系統(tǒng)的研究熱點(diǎn),倍受關(guān)注。通過嵌入式機(jī)器視覺系統(tǒng)的設(shè)計(jì)實(shí)例,闡述ARM與DSP有機(jī)結(jié)合的設(shè)計(jì)思想,重點(diǎn)研究ARM與DSP之間的數(shù)據(jù)通信。
1 嵌入式機(jī)器視覺系統(tǒng)總體方案
采用ARM+DSP結(jié)構(gòu)的機(jī)器視覺系統(tǒng)總體結(jié)構(gòu)如圖l所示。以三星公司高性能ARM處理器S3C2440作為主控制器,配置并移植Linux操作系統(tǒng),同時(shí)以TI公司的DSP芯片TMS320C5402為圖像處理的協(xié)處理器,通過對(duì)DSP芯片自帶的HPI接口的硬件連接方案和驅(qū)動(dòng)程序設(shè)計(jì),將二者有機(jī)地結(jié)合起來,各自發(fā)揮其獨(dú)特優(yōu)勢,協(xié)調(diào)配合,完成目標(biāo)采集、處理與視覺跟蹤。

首先由智能攝像機(jī)采集現(xiàn)場運(yùn)動(dòng)目標(biāo)的圖像,由ARM控制將數(shù)據(jù)存放在ARM與DSP的公共存儲(chǔ)區(qū)域中,并通知信號(hào)處理模塊DSP調(diào)用各種算法(幀間差分、圖像分割、特征提取、形心計(jì)算等)對(duì)視頻圖像進(jìn)行處理,完成目標(biāo)的識(shí)別與定位,并將結(jié)果信息傳給ARM處理器,由ARM控制步進(jìn)電機(jī),調(diào)整PTZ攝像機(jī)位姿(水平轉(zhuǎn)動(dòng)P-Pan、垂直轉(zhuǎn)動(dòng)T-Tilt、景深伸縮Z-Zoom),使其對(duì)準(zhǔn)運(yùn)動(dòng)目標(biāo),實(shí)現(xiàn)實(shí)時(shí)跟蹤。此外,ARM處理器還負(fù)責(zé)多任務(wù)管理、人機(jī)交互及中斷報(bào)警等。
作為雙核系統(tǒng),雙核各自擁有很好的性能,于是主機(jī)ARM與協(xié)處理器DSP之間能否進(jìn)行快速可靠的數(shù)據(jù)交換,直接決定機(jī)器視覺系統(tǒng)的運(yùn)行效率。在硬件設(shè)計(jì)方面,采用主機(jī)并行接口HPI實(shí)現(xiàn)主機(jī)ARM與協(xié)處理器DSP之間的硬件直連,設(shè)計(jì)簡單方便,時(shí)鐘頻率可達(dá)到DSP時(shí)鐘頻率的1/5,能夠支持DSP與主機(jī)之間的高速數(shù)據(jù)傳輸。在軟件設(shè)計(jì)方面,則移植嵌入式Linux操作系統(tǒng),將HPI看作字符設(shè)備完成了驅(qū)動(dòng)程序的設(shè)計(jì)。
2 雙機(jī)通信硬件設(shè)計(jì)
2.1 HPI接口簡介
主機(jī)接口(HPI)是TI公司C54x系列定點(diǎn)信號(hào)處理器(DSP)內(nèi)部自帶的接口部件,通過它可以方便地實(shí)現(xiàn)DSP與其他主機(jī)連接。C54x中的主機(jī)接口主要有3種類型:標(biāo)準(zhǔn)8位主機(jī)接口HPI-8,增強(qiáng)8位主機(jī)接口HPI-8,增強(qiáng)16位主機(jī)接口HPI-16。增強(qiáng)型的HPI可以允許主機(jī)訪問DSP所有的片上RAM單元,而標(biāo)準(zhǔn)主機(jī)接口只允許訪問固定的2 K片上RAM。本文中用到的TMS320C5402擁有增強(qiáng)HPI-16主機(jī)接口。它由以下5部分組成:
1)HPI存儲(chǔ)器(DARAM) 傳送主機(jī)與DSP之間的數(shù)據(jù),在一個(gè)機(jī)器周期內(nèi)能被訪問2次,可以用作通用的雙導(dǎo)址數(shù)據(jù)RAM或者程序RAM。
2)HPI地址寄存器(HPIA) 只有主機(jī)能對(duì)其進(jìn)行直接訪問。該寄存器中存放著當(dāng)前尋址的HPI存儲(chǔ)單元的地址。
3)HPI控制寄存器(HPIC) 地址002CH,主機(jī)和DSP都能對(duì)他直接訪問,用來保存HPI操作的控制和狀態(tài)位。
4)HPI數(shù)據(jù)鎖存器(HPID) 只有主機(jī)能對(duì)它進(jìn)行直接訪問。如果當(dāng)前進(jìn)行的是讀操作,則HPID中存放的是要從HPI存儲(chǔ)器中讀出的數(shù)據(jù);如果當(dāng)前進(jìn)行寫操作,則HPID中存放的是將要寫到HPI存儲(chǔ)器的數(shù)據(jù)。
5)HPI控制邏輯 處理HPI與主機(jī)之間的接口信號(hào)。
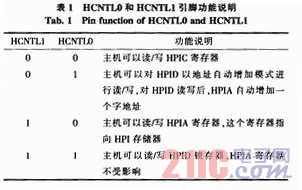
接口電路中使用的引腳及其作用是:HD[15:O]:并行、雙向、三態(tài)的數(shù)據(jù)總線,不傳遞數(shù)據(jù)時(shí)為高阻態(tài);HHWIL:半字定義選擇引腳,用來表示第一或者第二半字。當(dāng)?shù)碗娖綍r(shí)表示第一半字;當(dāng)高電平時(shí)表示第二半字。![]() :讀/寫輸入信號(hào)。高電平表示主機(jī)要讀HPI,低電平表示寫HPI。若主機(jī)沒有讀/寫選通,則可以用一根地址線代替。HCNTL0和HCNTLl控制引腳表示訪問那個(gè)內(nèi)部HPI寄存器和訪問寄存器的類型。表l是具體功能說明。
:讀/寫輸入信號(hào)。高電平表示主機(jī)要讀HPI,低電平表示寫HPI。若主機(jī)沒有讀/寫選通,則可以用一根地址線代替。HCNTL0和HCNTLl控制引腳表示訪問那個(gè)內(nèi)部HPI寄存器和訪問寄存器的類型。表l是具體功能說明。![]() :輸入主要作為HPI的使能信號(hào),而
:輸入主要作為HPI的使能信號(hào),而![]() 信號(hào)控制HPI數(shù)據(jù)傳遞;它們?nèi)呱蓛?nèi)部選通信號(hào)
信號(hào)控制HPI數(shù)據(jù)傳遞;它們?nèi)呱蓛?nèi)部選通信號(hào)![]() 。
。![]() 就緒信號(hào)引腳,高電平表示HPI已經(jīng)準(zhǔn)備好執(zhí)行1次數(shù)據(jù)傳送;低電平表示HPI正忙。HINT:主機(jī)外部中斷信號(hào),用于HPI向主機(jī)發(fā)出中斷。
就緒信號(hào)引腳,高電平表示HPI已經(jīng)準(zhǔn)備好執(zhí)行1次數(shù)據(jù)傳送;低電平表示HPI正忙。HINT:主機(jī)外部中斷信號(hào),用于HPI向主機(jī)發(fā)出中斷。![]() 地址選通信號(hào),僅用于復(fù)用方式。對(duì)于地址/數(shù)據(jù)總線分開的主機(jī),必須把信號(hào)連接到高電平。
地址選通信號(hào),僅用于復(fù)用方式。對(duì)于地址/數(shù)據(jù)總線分開的主機(jī),必須把信號(hào)連接到高電平。
2.2 接口電路及其工作原理
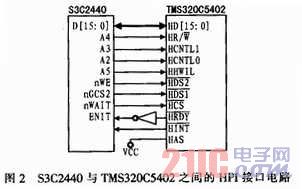
S3C2440與TMS320C5402通過HPI連接的接口電路如圖2所示,二者連接簡潔方便,不必使用任何的附加電路。工作時(shí),ARM首先初始化控制寄存器HPIC和地址寄存器HPIA,然后對(duì)HPID進(jìn)行讀寫。初始化HPIC、HPIA時(shí),通過A2、A3、A4、A5對(duì)應(yīng)的地址進(jìn)行操作,設(shè)置寄存器訪問控制HCNTL0、HCNTL1、讀寫控制![]() 和半字訪問HHWIL,配置好HPIC,并在HPIA中寫入HPI存儲(chǔ)器的起始地址。因?yàn)锳RM主機(jī)具有獨(dú)立的地址總線和數(shù)據(jù)總線,采用非復(fù)用方式,所以將HAS信號(hào)接高電平(VCC)。S3C2440的nWAIT信號(hào)與HPI的
和半字訪問HHWIL,配置好HPIC,并在HPIA中寫入HPI存儲(chǔ)器的起始地址。因?yàn)锳RM主機(jī)具有獨(dú)立的地址總線和數(shù)據(jù)總線,采用非復(fù)用方式,所以將HAS信號(hào)接高電平(VCC)。S3C2440的nWAIT信號(hào)與HPI的![]() 信號(hào)邏輯上反向,之間用反相器連接。 S3C2440通過片選信號(hào)nGCS2、讀使能信號(hào)nOE、寫使能信號(hào)nWE三者生成內(nèi)部選通信號(hào)
信號(hào)邏輯上反向,之間用反相器連接。 S3C2440通過片選信號(hào)nGCS2、讀使能信號(hào)nOE、寫使能信號(hào)nWE三者生成內(nèi)部選通信號(hào)![]() ,控制對(duì)HPI的讀寫。
,控制對(duì)HPI的讀寫。
3 軟件設(shè)計(jì)
3.1 Linux驅(qū)動(dòng)程序
Linux操作系統(tǒng)引入設(shè)備文件的概念,即把每一個(gè)設(shè)備都看作一個(gè)文件,像對(duì)待文件一樣對(duì)設(shè)備進(jìn)行操作。在Linux操作系統(tǒng)下,設(shè)備文件主要有3種類型:字符設(shè)備、塊設(shè)備、網(wǎng)絡(luò)設(shè)備,各自對(duì)應(yīng)一種類型的設(shè)備驅(qū)動(dòng)程序。本文設(shè)計(jì)的HPI接口的驅(qū)動(dòng)程序?qū)儆谧址O(shè)備驅(qū)動(dòng)程序。
Linux下的驅(qū)動(dòng)程序是為相應(yīng)的設(shè)備編寫多個(gè)基本函數(shù),填充file_operations結(jié)構(gòu)體。其中定義了實(shí)現(xiàn)各種操作函數(shù)。如下所示:
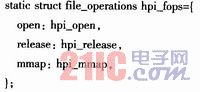
其中,open和release完成設(shè)備的打開和關(guān)閉。mmap為內(nèi)存地址映射操作。驅(qū)動(dòng)程序的設(shè)計(jì)是通過實(shí)現(xiàn)個(gè)中操作函數(shù)的基本功能,為相應(yīng)的設(shè)備在應(yīng)用層提供統(tǒng)一的接口。
下面是本文中的HPI接口的驅(qū)動(dòng)程序的設(shè)備入口hpi_open函數(shù),它負(fù)責(zé)打開、準(zhǔn)備設(shè)備。
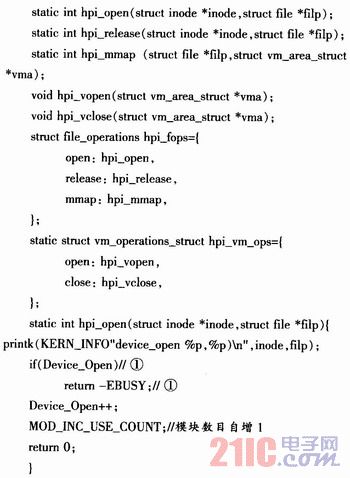
任何時(shí)候?qū)ψ址O(shè)備(HPI)接口進(jìn)行打開操作,都會(huì)調(diào)用設(shè)備的open入口點(diǎn)(hpi_open)。所以open函數(shù)(hpi_open)必須對(duì)將要進(jìn)行的I/O操作(對(duì)DSP讀寫數(shù)據(jù))做好必要的準(zhǔn)備工作,例如設(shè)備是獨(dú)占的,則open函數(shù)(hpi_open)必須將設(shè)備標(biāo)記成忙狀態(tài),如上面例程中的①處兩行所示。
3.2 驅(qū)動(dòng)程序中映射的實(shí)現(xiàn)
由于在Linux系統(tǒng)中,用戶應(yīng)用程序不能直接對(duì)驅(qū)動(dòng)程序的內(nèi)存空間進(jìn)行操作,因此必須用到內(nèi)存映射機(jī)制。內(nèi)存映射是指把內(nèi)核中的特定的內(nèi)存空間映射到用戶空間的內(nèi)存中去。對(duì)驅(qū)動(dòng)程序來說,內(nèi)存映射可以提供給用戶程序直接訪問設(shè)備內(nèi)存的能力。
mmap系統(tǒng)調(diào)用映射一個(gè)設(shè)備,意味著使用戶空間的一段地址關(guān)聯(lián)到設(shè)備內(nèi)存上,這使得只要程序在分配的地址范圍內(nèi)進(jìn)行讀取或者寫入,實(shí)際上就是對(duì)設(shè)備的訪問。
mmap方法是file_operations結(jié)構(gòu)的一部分,要實(shí)現(xiàn)映射必須分兩步:
1)調(diào)用內(nèi)核中的remap_page_range函數(shù),它的功能是:構(gòu)造用于映射一段物理地址的新頁表,實(shí)現(xiàn)了內(nèi)核空間與用戶空間的映射,其原型如下:
![]()
函數(shù)參數(shù)的確切含義如下:unsigned long virt_add為重映射開始處的虛擬地址。這個(gè)函數(shù)為虛地址空間virt_add和virt_add+size之間的范圍構(gòu)造頁表。unsigned long phys_add為虛擬地址應(yīng)該映射到的物理地址。unsigned long size為被重映射的區(qū)域的大小,以字節(jié)為單位。pgprot_t prot為新VMA所請(qǐng)求的“保護(hù)”屬性。驅(qū)動(dòng)程序不必修改保護(hù),在vma->vma_page_prot中找到的參數(shù)可以不加改變地使用。
本課題中使用mmap調(diào)用的代碼如下:

這樣就為DSP的HPI接口所對(duì)應(yīng)的總線物理地址:0x10000000(對(duì)應(yīng)nGCS2)在vma->vm_start和vma->vm_end之間構(gòu)造了新的頁表。
2)在構(gòu)造好新頁表之后,可以調(diào)用mmap函數(shù)完成映射,從圖2可以看到硬件連接圖中的連接DSP片選信號(hào)![]() 的是引腳nGCS2,從圖3中查出它在內(nèi)存空間對(duì)應(yīng)的位置是0x10000000。mmap函數(shù)的原型是:mmap(void*start,sizelength,int prot,int flags,int fd,off_toff-set)。用以下語句獲得映射后的地址:
的是引腳nGCS2,從圖3中查出它在內(nèi)存空間對(duì)應(yīng)的位置是0x10000000。mmap函數(shù)的原型是:mmap(void*start,sizelength,int prot,int flags,int fd,off_toff-set)。用以下語句獲得映射后的地址:
hpi_mmap_add=mmap(NULL,length,PROT_READ|PROT_WRITE,MAP_SHARED,hpi_fd,0)其中參數(shù)start指明描述字fd對(duì)應(yīng)的“文件”(也就是/dev/hpi設(shè)備)在進(jìn)程地址空間內(nèi)的映射區(qū)的開始地址,必須是頁面對(duì)齊的地址,通常設(shè)為NULL,讓內(nèi)核去自動(dòng)選擇開始地址。任何情況下,mmap的返回值為內(nèi)存映射區(qū)的開始地址。這樣通過對(duì)hpi_mmap_add操作,實(shí)現(xiàn)對(duì)起始地址為0x10000000的內(nèi)存段操作。

3.3 驅(qū)動(dòng)程序的內(nèi)核加載方式
在完成了嵌入式Linux驅(qū)動(dòng)程序的編寫測試工作后,下一步就是將編寫好的驅(qū)動(dòng)程序加載到系統(tǒng)內(nèi)核,完成驅(qū)動(dòng)硬件的工作。通常有以下兩種做法:
1)驅(qū)動(dòng)程序直接編譯入內(nèi)核 采用這種方式編譯的驅(qū)動(dòng)程序在內(nèi)核啟動(dòng)時(shí)就已經(jīng)在內(nèi)存中,運(yùn)行時(shí)不需要再自行加載驅(qū)動(dòng),可以保留專用的存儲(chǔ)器空間。
2)驅(qū)動(dòng)程序的模塊加載 采用模塊加載方式的驅(qū)動(dòng)程序?qū)?huì)以模塊形式存儲(chǔ)在文件系統(tǒng)里,需要時(shí)動(dòng)態(tài)載入內(nèi)核即可,使得驅(qū)動(dòng)程序按需加載,不用時(shí)節(jié)省內(nèi)存,并且驅(qū)動(dòng)程序相對(duì)獨(dú)立于內(nèi)核,升級(jí)靈活,授權(quán)方式靈活。本文就采用此種方式。
因?yàn)椴捎玫氖悄K加載方式,所以還需要借助兩個(gè)重要的函數(shù)init_module()和cleanup_module(),完成模塊的注冊(cè)和卸載。具體源碼可以參見/usr/src/linux/kemel/module.c。在2.3版本以后采用了新的方法命名這兩個(gè)函數(shù),定義exampie_init()代替init_module()函數(shù),example_cleanup()代替cleanup_module()函數(shù)。在程序的最后用下面兩行代碼進(jìn)行聲明:
module_init(S3C2440_HPI_init);
module_exit(S3C2440_HPI_exit);
3.4 接口具體應(yīng)用的設(shè)計(jì)方法
利用編寫好的驅(qū)動(dòng)程序,用戶可以編寫出不同的應(yīng)用接口程序。下面給出自增寫的方法:
根據(jù)圖2的接口電路,A2,A3,A4,A5對(duì)應(yīng)的接口分別是HCNTI0,HCNTL1,![]() ,HHWIL,當(dāng)自增模式寫低半字時(shí),它們的值應(yīng)該分別是:HCNTL0=0,HCNTL1=1,
,HHWIL,當(dāng)自增模式寫低半字時(shí),它們的值應(yīng)該分別是:HCNTL0=0,HCNTL1=1,![]() ,HHWIL=O,即A[5:2]=0010,在HPI_VA_BASE上增加偏移就可以對(duì)控制口線控制。所以自增寫第一半字時(shí),加00000100即:0x04,當(dāng)自增模式寫高字節(jié)時(shí),它們的值應(yīng)該是HCNTL0=0,HCNTL1=1,
,HHWIL=O,即A[5:2]=0010,在HPI_VA_BASE上增加偏移就可以對(duì)控制口線控制。所以自增寫第一半字時(shí),加00000100即:0x04,當(dāng)自增模式寫高字節(jié)時(shí),它們的值應(yīng)該是HCNTL0=0,HCNTL1=1,![]() ,HHWIL=1,即A[5:2]=1010。所以自增寫第二半字時(shí),加00101000即:0x28。對(duì)HPI控制寄存器寫地址用如下宏定義:
,HHWIL=1,即A[5:2]=1010。所以自增寫第二半字時(shí),加00101000即:0x28。對(duì)HPI控制寄存器寫地址用如下宏定義:
另外,在自增寫過程中,對(duì)于作為接收端的DSP處理器,需要明確:1)是否準(zhǔn)備就緒,可以進(jìn)行寫入數(shù)據(jù),HPI-16中可以通過HPIC寄存器查詢HRDY的狀態(tài),當(dāng)HRDY為1時(shí),即表明HPI已經(jīng)準(zhǔn)備就緒;2)指明要寫數(shù)據(jù)的區(qū)域址,即dsp_add_w=(hpi.hpi_dsp_add),這是從應(yīng)用程序傳過來的參數(shù),以確定寫數(shù)據(jù)區(qū)域的起始地址。自增寫的代碼和注釋如下:

![]()
4 結(jié)束語
通過一個(gè)嵌入式機(jī)器視覺系統(tǒng)工程實(shí)例,闡述了嵌入式系統(tǒng)中,用ARM+DSP的雙核結(jié)構(gòu)加載Linux操作系統(tǒng),通過HPI接口進(jìn)行通信和交換數(shù)據(jù)的設(shè)計(jì)方法,設(shè)計(jì)了HPI接口連接的硬件電路和Linux環(huán)境下的驅(qū)動(dòng)程序,描述了該接口的具體應(yīng)用設(shè)計(jì)方法。
ARM+DSP的雙核系統(tǒng)是新型的嵌入式機(jī)器視覺系統(tǒng)構(gòu)建方法,而這里設(shè)計(jì)的通過HPI接口交換數(shù)據(jù)的雙機(jī)通信方法,在機(jī)器視覺系統(tǒng)項(xiàng)目中被成功地應(yīng)用證明,傳輸數(shù)據(jù)速度達(dá)到10 Mb/s,能夠滿足嵌入式系統(tǒng)對(duì)實(shí)時(shí)性的要求,具有廣闊的應(yīng)用前景。但在應(yīng)用中需要注意的是:HPI接口的讀寫過程都涉及到公共的寄存器(HPI的控制寄存器、地址寄存器和數(shù)據(jù)寄存器)及HPI接口提供給主機(jī)(host)端讀寫的內(nèi)存的相關(guān)操作,所以在特定的應(yīng)用程序、驅(qū)動(dòng)程序的設(shè)計(jì)中,一定要用信號(hào)量等互斥機(jī)制加以保護(hù),否則,會(huì)出現(xiàn)讀寫錯(cuò)亂的現(xiàn)象。