0 引言
常用的電機(jī)變頻調(diào)速控制方法有電壓頻率協(xié)調(diào)控制(即v/F比為常數(shù))、轉(zhuǎn)差頻率控制、矢量控制以及直接轉(zhuǎn)矩控制等。其中,矢量控制是目前交流電動機(jī)較先進(jìn)的一種控制方式。它又有基于轉(zhuǎn)差頻率控制的、無速度傳感器和有速度傳感器等多種矢量控制方式。其中基于轉(zhuǎn)差頻率控制的矢量控制方式是在進(jìn)行U/f恒定控制的基礎(chǔ)上,通過檢測異步電動機(jī)的實際速度n,并得到對應(yīng)的控制頻率f,然后根據(jù)希望得到的轉(zhuǎn)矩,分別控制定子電流矢量及兩個分量間的相位,對輸出頻率f進(jìn)行控制的。采用這種控制方法可以使調(diào)速系統(tǒng)消除動態(tài)過程中轉(zhuǎn)矩電流的波動,從而在一定程度上改善了系統(tǒng)的靜態(tài)和動態(tài)性能,同時它又具有比其它矢量控制方法簡便、結(jié)構(gòu)簡單、控制精度高等特點(diǎn)。
Simulink仿真系統(tǒng)是Matlab最重要的組件之一,系統(tǒng)提供了標(biāo)準(zhǔn)的模型庫,能夠幫助用戶在此基礎(chǔ)上創(chuàng)建新的模型庫,描述、模擬、評價和細(xì)化系統(tǒng),從而達(dá)到系統(tǒng)分析的目的。在此利用Matlab/Simulink軟件構(gòu)建了轉(zhuǎn)差頻率矢量控制的異步電機(jī)調(diào)速系統(tǒng)仿真模型,并對此仿真模型進(jìn)行了實驗分析。
1 轉(zhuǎn)差頻率矢量控制系統(tǒng)
1.1 數(shù)學(xué)模型
轉(zhuǎn)差頻率矢量控制是按轉(zhuǎn)子磁鏈定向的間接矢量控制系統(tǒng),不需要進(jìn)行復(fù)雜的磁通檢測和繁瑣的坐標(biāo)變換,只要在保證轉(zhuǎn)子磁鏈大小不變的前提下,通過檢測定子電流和旋轉(zhuǎn)磁場角速度,通過兩相同步旋轉(zhuǎn)坐標(biāo)系(M-T坐標(biāo)系)上的數(shù)學(xué)模型運(yùn)算就可以實現(xiàn)間接的磁場定向控制。其控制的基本方程式如下:
電壓方程:


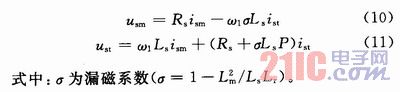
式中:usm,ust,urm,urt為定、轉(zhuǎn)子在M-T軸上的電壓分量;Ls為定子自感;Lr為轉(zhuǎn)子自感;Lm為定、轉(zhuǎn)子互感;ω1為定子角頻率、ωs為轉(zhuǎn)差角頻率;P為微分算子;Rs,Rr為定、轉(zhuǎn)子電阻。
磁鏈方程為:
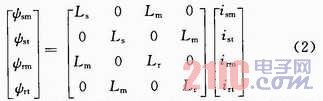
式中:ψsm,ψrm為定、轉(zhuǎn)子磁鏈勵磁分量;ψst,ψrt為定、轉(zhuǎn)子磁鏈轉(zhuǎn)矩分量;
M-T坐標(biāo)上的電磁轉(zhuǎn)矩方程:

式中:np為轉(zhuǎn)子極對數(shù);Te為電磁轉(zhuǎn)矩。
當(dāng)按轉(zhuǎn)子磁鏈定向時,應(yīng)有ψrm=ψr,ψrt=0,代入以上3個方程中,即得:
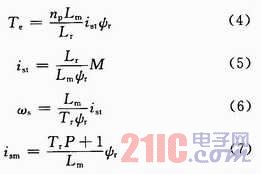
式中:M為定、轉(zhuǎn)子互感系數(shù);ψr為轉(zhuǎn)子總磁鏈;Tr為轉(zhuǎn)子電磁時間常數(shù),Tr=Lr/Rr。異步電動機(jī)轉(zhuǎn)矩為:
 [!--empirenews.page--]
[!--empirenews.page--]
當(dāng)電機(jī)穩(wěn)態(tài)運(yùn)行時,S很小,因此很小,轉(zhuǎn)矩的近似表達(dá)式為:

由式(9)可見,只要能保證φm不變,控制ω。即可控制Te,從而間接地控制電機(jī)的轉(zhuǎn)速。
1.2 轉(zhuǎn)差頻率矢量控制系統(tǒng)結(jié)構(gòu)
基于轉(zhuǎn)差頻率控制的異步電動機(jī)矢量控制調(diào)速系統(tǒng)原理如圖1所示。主電路采用SPWM電壓型逆變器,轉(zhuǎn)速采取轉(zhuǎn)差頻率控制,即異步電動機(jī)定子角頻率ω1由轉(zhuǎn)子角頻率ω和轉(zhuǎn)差角頻率ωs組成(ω1=ω+ωs)。
圖1中:ω、-ω分別為轉(zhuǎn)子角頻率給定和轉(zhuǎn)子角頻率負(fù)反饋;i1m、i1t分別為定子電流的轉(zhuǎn)矩分量和勵磁分量;ω1、+ω分別為定子角頻率和轉(zhuǎn)子角頻率正反饋;u1m、u1t分別為定子電壓的轉(zhuǎn)矩分量和勵磁分量;

根據(jù)基本方程,以及圖1可以看出,在保持轉(zhuǎn)子磁鏈ψr不變的情況下,電動機(jī)轉(zhuǎn)矩直接受定子電流的轉(zhuǎn)矩分量ist控制,并且轉(zhuǎn)差角頻率ωs可以通過定子電流的轉(zhuǎn)矩分量ist計算,轉(zhuǎn)子磁鏈ψr也可以通過定子電流的勵磁分量ism來計算。在系統(tǒng)中,轉(zhuǎn)速通過轉(zhuǎn)速調(diào)節(jié)器ASR調(diào)節(jié),輸出定子電流的轉(zhuǎn)矩分量 ist,然后計算得到轉(zhuǎn)差ωs。如果采用磁通不變的控制,則Pψr=0,由式(7)可得ψrm=Lmirm,代入式(6),得 ωs=ist/(Trism)。
由于矢量控制方程得到的是定子電流的勵磁分量和轉(zhuǎn)矩分量,而本系統(tǒng)采用電壓型逆變器,需要將電流的控制方式轉(zhuǎn)換為電壓控制。由于 ψrm=Lmirm,ψrt=0,而變頻調(diào)速時電動機(jī)轉(zhuǎn)子短路即urm=urt=O,將其代入式(1),并展開可得定子電壓的勵磁分量usm和轉(zhuǎn)矩分量 ust,其變換關(guān)系為:
2 轉(zhuǎn)差頻率矢量控制調(diào)速系統(tǒng)仿真與研究
2.1 仿真模型的建立
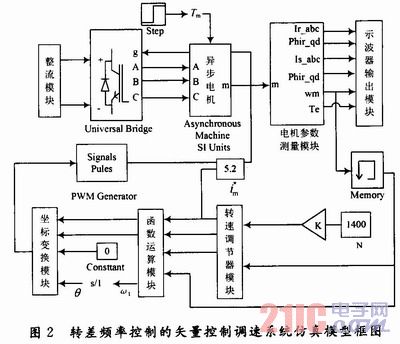
根據(jù)轉(zhuǎn)差頻率矢量控制系統(tǒng)的原理框圖,采用Matlab/Simulink軟件構(gòu)建轉(zhuǎn)差頻率矢量控制調(diào)速系統(tǒng)模型如圖2所示。圖中控制部分由給定、PI轉(zhuǎn)速調(diào)節(jié)器、函數(shù)運(yùn)算、兩相/三相坐標(biāo)變換、PWM脈沖發(fā)生器等環(huán)節(jié)組成。
[!--empirenews.page--]
2.2 仿真與結(jié)果分析
2.2.1 模型參數(shù)
模型參數(shù)主要有電機(jī)模型參數(shù)、控制系統(tǒng)放大器參數(shù)、給定值模塊參數(shù)、限幅模塊參數(shù)等,其中電機(jī)參數(shù)設(shè)定為:額定電壓UN=380 V;頻率fN=50 Hz;極對數(shù)P=2;定子電阻Rs=O.435 Ω;額定功率PN=25 kW;轉(zhuǎn)子電阻Rr=O.435 Ω;定、轉(zhuǎn)子互感Lm=O.069 H;轉(zhuǎn)動慣量J=O.19 kg·m2;轉(zhuǎn)矩給定值;逆變器直流電壓510 V;定子繞組自感Ls=0.071 H;轉(zhuǎn)子繞組自感Lr=0.071 H;漏磁系數(shù);轉(zhuǎn)子時間常數(shù)Tr=Lr/R=O.087。其它參數(shù):勵磁電流給定值;額定轉(zhuǎn)速n*=1400r/min。仿真時間設(shè)定為0.6 s。
將參數(shù)代入式(6),式(10),式(11)中可得Usm,Ust和ωs函數(shù)表達(dá)式為:
式中:u(1)、u(2)、u(3)為模塊參數(shù)變量,分別代表ism,ist,ω1。
2.2.2 仿真結(jié)果分析
在此采用ODE5算法對系統(tǒng)進(jìn)行仿真。在啟動O.5 s時加載TL=65 N·m,其仿真波形如圖3所示。
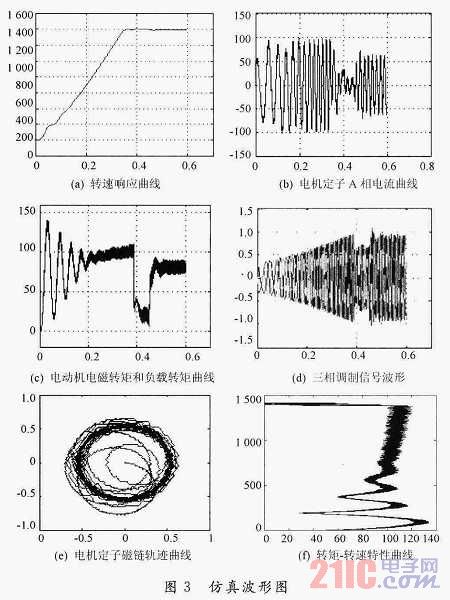
從仿真結(jié)果中可以得到電機(jī)在起動和加載過程中,轉(zhuǎn)速、電流、電壓和轉(zhuǎn)矩的變化過程。圖3(a)中可以看到,轉(zhuǎn)速隨時間的變化逐漸增大。當(dāng)t=O.361 s時,轉(zhuǎn)速達(dá)到額定轉(zhuǎn)速1400 r/rain左右,而當(dāng)t=O.5 s時,由于此時電動機(jī)開始加載,所以使得轉(zhuǎn)速有所波動,隨后趨于穩(wěn)定。圖3(b)顯示,電機(jī)空載起動達(dá)到穩(wěn)定轉(zhuǎn)速時,電流值下降為起動電流20A。而電動機(jī)加載后,電流迅速上升,隨后維持在左右。同樣,圖3(c)中,在加載后電動機(jī)轉(zhuǎn)矩也隨之增加,達(dá)到給定值Te=80 N·m。圖3(d)反應(yīng)了系統(tǒng)坐標(biāo)變換模塊和函數(shù)運(yùn)算模塊變換后輸出信號波形,經(jīng)2r/3s變換后的三相調(diào)制信號的幅值在調(diào)節(jié)過程是逐步增加的,信號幅值的提高,保證了電動機(jī)電流在起動過程中保持不變。圖3(e)與圖3(f)分別反映了電動機(jī)在起動過程中定子繞組產(chǎn)生的旋轉(zhuǎn)磁場和電動機(jī)的轉(zhuǎn)矩一轉(zhuǎn)速特性,圖3(e)可以看出,定子磁鏈的軌跡一開始并不規(guī)則,而且在不斷變化,但是隨著時間的變化,磁鏈軌跡開始呈現(xiàn)規(guī)則圖形,保持穩(wěn)定,這是因為電動機(jī)在零狀態(tài)起動時,電動機(jī)磁場有一個建立過程,在建立過程中磁場變化是不規(guī)則的,隨著時間的推移,磁場逐漸規(guī)則如圖3(e)所示。而磁場的變化則會影響轉(zhuǎn)矩的變化,圖3(f)所示轉(zhuǎn)矩在一開始即電動機(jī)零狀態(tài)起動時,大幅度變化,當(dāng)磁場變化逐漸規(guī)則時,轉(zhuǎn)矩變化也開始在小范圍內(nèi)波動,幾乎保持穩(wěn)定。電動機(jī)的轉(zhuǎn)矩一轉(zhuǎn)速特性反映了通過矢量控制能使電動機(jī)保持恒轉(zhuǎn)矩起動,并且調(diào)節(jié)ASR的輸出限幅可以改變最大輸出轉(zhuǎn)矩。
3 結(jié)語
針對直接轉(zhuǎn)子磁場定向矢量控制系統(tǒng)的缺點(diǎn),在分析轉(zhuǎn)差頻率矢量控制系統(tǒng)方法原理的基礎(chǔ)上,構(gòu)建了轉(zhuǎn)差頻率矢量控制的異步電機(jī)調(diào)速系統(tǒng)仿真模型,并對這種模型進(jìn)行了仿真研究與分析。在仿真實驗過程中,為了獲得較好的仿真波形,作者進(jìn)行了大量的參數(shù)優(yōu)化設(shè)計。實驗中發(fā)現(xiàn);系統(tǒng)中PI調(diào)節(jié)器的比例系數(shù)K1、積分系數(shù)K2與坐標(biāo)變換模塊輸出信號的放大系數(shù)需要配合調(diào)節(jié),當(dāng)偏差較大時,調(diào)節(jié)K1,以快速減少偏差;當(dāng)偏差達(dá)到要求后,調(diào)節(jié)K2,以消除穩(wěn)態(tài)誤差。同時要配合調(diào)節(jié)坐標(biāo)變換模塊輸出信號的放大系數(shù),這樣才能保證PWM發(fā)生器輸出正確的三相調(diào)制信號波形。仿真與實驗結(jié)果驗證了轉(zhuǎn)差頻率矢量控制的異步電機(jī)調(diào)速系統(tǒng)具有良好的動、靜態(tài)控制性能。
