
一、概述
隨著國內(nèi)經(jīng)濟的蓬勃發(fā)展,廣告業(yè)也隨之迅速發(fā)展。如此誘人的市場行情促使廣告制作商競相投資購買戶外噴繪設備,從進口噴繪機到國產(chǎn)噴繪機,簡直就是遍地開花!因此噴繪機性能的要求也越來越高。步進電機在低速時扭矩大,但步進電機的機構決定了步進電機無法支持600RPM以上的速度,另外,由于步進電機在停機時定位時的缺陷會造成走位誤差,已經(jīng)無法滿足現(xiàn)在噴繪機高速高效的要求。由于伺服電機響應快,速度高,并且定位精度高的特點,現(xiàn)在噴繪機普遍選用這一類電機作為送布電機和小車板控制電機。隨著噴繪市場對噴繪精度和噴繪速度的不斷追求,UV平板噴繪機將逐漸被推向市場。隨著UV平板噴繪機的發(fā)展,配套的伺服電機也將升級換代。在中高端的噴繪機市場上將以交流伺服電機系統(tǒng)為主。
二、工藝簡介
噴繪機是運用一種鳴PZT的半導體壓電晶體資料,在它上面制造一系列的極微細小的通道,再由它發(fā)生的機械效應將墨點激射而出。在PZT的出產(chǎn)入程中,它經(jīng)由極性化處置:物料的原子電荷被強行按指定的方向排列。這是一個非常要害的特性,因為當外接電場效應附加在經(jīng)由極性化的資料上時,依據(jù)它的方向定義,它會令PZT發(fā)生一個物理性的變形,而就是這種現(xiàn)像,授于了一個噴射的才能.目前噴繪機的送布電機和小車板電機從電機類型上分為步進電機和伺服電機。送布電機要求能夠正反轉,進布和退布速度保持平穩(wěn),在停機時自動鎖死,防止布滑落。小車板電機要求在移動過程中穩(wěn)定無振動,小車板靜止時保持力度足夠大。對于噴頭軸和進布軸伺服性能的要求主要是伺服系統(tǒng)有較高的動態(tài)響應及較高的定位精度。全數(shù)字交流伺服驅動器有著高速度頻率響應,具有共振抑制功能,可以精確調諧,消除震動;控制精度可以達到1個脈沖,最大的輸入頻率可以達到250Kpps,這都很好的保證了進布軸所需驅動的要求。對于主軸伺服要求有快速的啟停特性和穩(wěn)定的速度控制,全數(shù)字交流伺服驅動器具有開放式的參數(shù)調整接口,可以根據(jù)用戶的使用情況進行參數(shù)的設置。
三、設備組成
噴繪機設備系統(tǒng)部分有運動控制板卡, KONICA256控制系統(tǒng),包括伺服控制卡、噴頭控制板、供墨系統(tǒng)板,主控板為USB接口。噴繪軟件大都采用蒙泰噴繪軟件,可接受PostScript 文件、TIFF、JPG、EPS圖形文件;直接打印輸出,速度快捷,自動大幅分塊輸出。噴繪機中的電機從功能上分為3類:墨泵電機,送布電機和小車板電機。
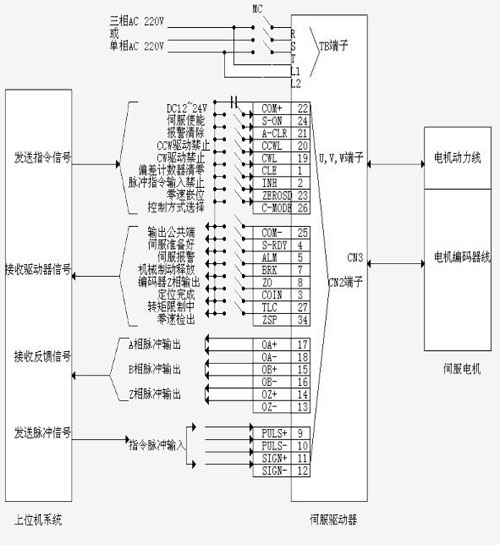
四、控制線(CN2)接線圖與伺服參數(shù)設置
1)控制線(CN2)接線圖
2)參數(shù)設置說明:
P4=0(控制方式選擇,0:位置控制);
P9=5(電機型號選擇);
P26=0/1(脈沖輸出邏輯取反);
P27=0/1(脈沖輸入邏輯取反,可用于改變電機方向);
P31=1(輸入指令脈沖倍頻分子);
P32=1(輸入指令脈沖倍頻分母);
注:電子齒輪比=PA31/PA32==Ppulse / P
其中Ppulse :電機每轉脈沖數(shù),指電機旋轉一圈電機反饋元件反饋的的脈沖數(shù)(脈沖/圈)。如2500線的增量式編碼器,其反饋到驅動器的脈沖數(shù)為2500×4=10000;
P:指要使電機旋轉一圈伺服所需接收的上位機指令脈沖數(shù)(脈沖/圈);
五、調試與注意事項
1)、調試步驟:
A、正確接好電機動力線(U、V、W、PE),編碼器線(CN3),電源線(L1、L2、R、S、T),根據(jù)要求接好上位機控制線(CN2);
B、低速空載運行一下電機,看電機方向和上位機接收的AB信號是否正確(可通過調節(jié)PA26、PA27參數(shù)來改變電機方向);
C、根據(jù)要求設置好伺服驅動器的電子齒輪比(PA31/PA32);
D、完成上述步驟后,再運行一下電機,看電機聲音是否正常,電機剛性是否滿足以及響應時間;(可通過調節(jié):位置環(huán)參數(shù)PA11、PA12、PA13;速度環(huán)參數(shù)PA14、PA15;電流環(huán)參數(shù)PA38,PA41)。
E、調節(jié)后試做一樣品看是否滿足要求,樣品不是很滿意時可重復D步驟,直到加工出的樣品滿足要求。
2)、注意事項:
A、接動力線(U、V、W)時,一定要一一對應接到U、V、W端子上。不能通過改變U、V、W相序來改變電機方向,可通過調節(jié)參數(shù)來該變電機方向。
B、接控制線(CN2)時,上位機系統(tǒng)和伺服一定要有一端接屏蔽線,避免外界對控制信號的干擾。
C、布線一定要合理,交直流電源要嚴格分開,控制線要與電機動力線、電源線嚴格分開。
3)、結果:經(jīng)過客戶的試用,加工出來的產(chǎn)品都符合客戶需求,各項指標都達到要求,同時還提高了生產(chǎn)效率。
六、故障與排除方法
1)故障:上位機一給信號電機就跑飛了,驅動器出現(xiàn)09號報警;
排除方法:檢查電機動力線(U、V、W)相序是否接錯,查看驅動器PA9(電機型號選擇)是否設置正確。
2)故障:出現(xiàn)27號報警
排除方法:查看電機編碼器線(CN3)是否松了,固定好后再試。
3)故障:上位機發(fā)送脈沖,電機不運行
排除方法:查看控制線(CN2)中的信號線是否接錯,查看伺服驅動器PA64看是否設置正確,驅動器內(nèi)部使能(PA64=64),上位機使能(PA64=0)。
4)故障:運行過程中出現(xiàn)01號報警;
排除方法:過載保護,在機械沒有卡住的情況下,看 PA48和PA81(過載倍數(shù))是否設置過低,可以相對把PA48設置高些。
七、總結
此噴繪機充分結合了東能伺服EPS2系列的響應快、定位精確、運行平穩(wěn)等優(yōu)點。經(jīng)過客戶的試用,噴繪出來的圖案都符合客戶要求,各項指標都達到要求,同時還提高了生產(chǎn)效率,使客戶達到最大滿意度。此設備向客戶充分展示了東能伺服的優(yōu)勢,同時也提高了噴繪機設備在市場上的競爭力。