
近幾年國內(nèi)逐漸開始使用拆焊臺和回流焊,但普遍存在以下問題:(1)控制芯片采用簡單的單片機(jī),,以"裸奔"為主沒嵌操作系統(tǒng),,從而導(dǎo)致系統(tǒng)過于簡單或分配不合理。(2)傳感器一般都采用熱電偶,,但不加補(bǔ)償電路,,而且很少在程序中采用算法,這樣加熱器件往往存在慣性和滯后性,,從而導(dǎo)致控溫不精準(zhǔn),。(3)沒有將拆焊臺和回流焊爐集于一體,使硬件利用率不高,。
因此,,本文提出并研究設(shè)計了一種基于μC/OS-II嵌入式實時系統(tǒng)的智能拆焊、回流焊溫度控制系統(tǒng),。
1 智能拆焊,、回流焊臺電路設(shè)計原理
本設(shè)計利用熱電偶傳感器檢測出與溫度對應(yīng)的電壓信號,然后經(jīng)27L2放大和ARM7內(nèi)部A/D轉(zhuǎn)換成處理器可識別的數(shù)字信號,。再通過ARM7來采集溫度信號并對其進(jìn)行運(yùn)算,、處理,最后根據(jù)運(yùn)算,、處理的結(jié)果來控制紅外線燈頭和電熱盤,。整個過程通過液晶顯示屏(128×64)清晰顯示。能夠智能控溫,順利拆,、焊多種型號芯片,。加熱燈頭能夠按規(guī)定的溫度曲線加熱,,可設(shè)置存儲8條曲線(掉電數(shù)據(jù)不丟失),。預(yù)熱盤能夠保持設(shè)置的恒定溫度(誤差不能超過3℃),有實時溫度跟蹤功能,?!?br />
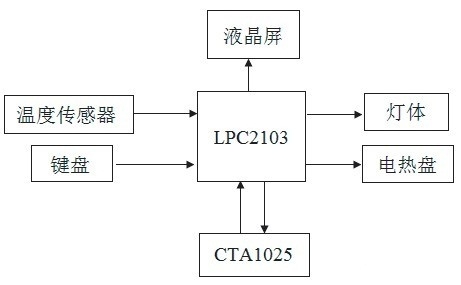
圖1 設(shè)計方框圖。
主要包括電路供電單元,、信號檢測電路,、執(zhí)行控制單元、人機(jī)交互界面幾部分單元模塊,。
2 硬件電路
2.1 電路供電單元
主要由變壓器,、整流二極管、濾波電容,、集成穩(wěn)壓器等構(gòu)成,,為電路提供5V、3.3V和1.8V的穩(wěn)定電壓,。
2.2 信號檢測電路
主要由熱電偶,、運(yùn)算放大器27L2、DS18B20及ARM7內(nèi)部AD等組成,。將溫度轉(zhuǎn)換成處理器可識別的數(shù)字信號,。
本設(shè)計的溫度采集電路如圖2所示,在P6口的1,、3引腳接熱電偶傳感器的正端,,2、4引腳接熱電偶傳感器的負(fù)端,。熱電偶采集到信號后經(jīng)C00,、C10(高頻濾波電容)將高頻雜波濾除,再經(jīng)27L2(低頻小信號放大器)將信號放大,,其中R64與R63的和與R65的比值即為U3B的放大倍數(shù),,同理,R60與R62的和與R61的比值為U3A的放大倍數(shù),。放大后再經(jīng)C01和C11將高頻雜波濾除,,最后該信號被傳到ARM7,經(jīng)其內(nèi)部AD轉(zhuǎn)換器將模擬電壓信號轉(zhuǎn)換成處理器可識別的數(shù)字信號,。當(dāng)熱電偶傳感器探頭部分的溫度發(fā)生變化時,,熱電偶傳感器兩端的電壓也按一定比例對應(yīng)發(fā)生變化,然后該電壓信號經(jīng)27L2放大,再經(jīng)ARM內(nèi)部AD將模擬量轉(zhuǎn)換成數(shù)字量,,ARM處理器得到數(shù)字量后便知道現(xiàn)在的溫度,。當(dāng)然要想精確測溫僅有熱電偶測溫模塊是不夠的?!?br />
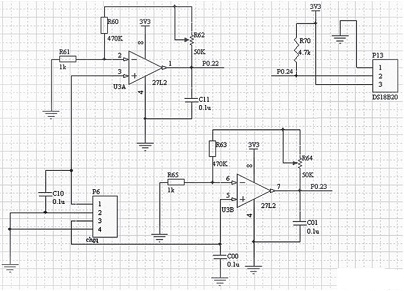
圖2 溫度采集電路,。
因為熱電偶傳感器有一個缺陷,它測的溫度是探頭與冷端之間的溫度差,,也就是說若僅用上述電路測溫,,則只有在冷端溫度為零點的情況下測得的溫度才是最精確的,冷端的溫度與零點的溫差越大,,測得的溫度數(shù)據(jù)越不精確,。而本設(shè)計中焊臺加熱的同時,熱電偶冷端溫度會變化,,從而造成了測溫不準(zhǔn)確,。為了解決上述問題,特別增加了DS18B20作為補(bǔ)償,,在工業(yè)上稱為補(bǔ)正系數(shù)修正法,。應(yīng)用的公式為:
T=T1+kT2
式中T為實際溫度,T1為DS18B20測得的溫度,,T2為熱電偶傳感器模塊測得的溫度,,k為補(bǔ)正系數(shù),這里取0.82,。
2.3 ARM最小系統(tǒng)
本設(shè)計采用ARM7作為主控芯片,,主要因其性價比高、資源豐富,、工作穩(wěn)定可靠,。它帶有32kB的片內(nèi)Flash程序存儲器和8kB的片內(nèi)靜態(tài)RAM;128位寬度接口/加速器可實現(xiàn)高達(dá)70MHz工作頻率;10位A/D轉(zhuǎn)換器提供8路輸入;2個32位定時計數(shù)器和2個16位定時計數(shù)器;多達(dá)32個通用IO口,可承受5V電壓;多個串行接口,,包括2個UART,、2個I2C總線、SPI和具有緩沖作用和數(shù)據(jù)長度可變功能的SSP;多達(dá)13個邊沿,、電平觸發(fā)的外部中斷管腳;一個可編程的片內(nèi)PLL可實現(xiàn)最大為70MHz的CPU操作頻率等等,。
在圖3ARM最小系統(tǒng)中,11.0592M的晶振和兩個20pF電容為系統(tǒng)提供穩(wěn)定的工作頻率,,然后再經(jīng)ARM內(nèi)部鎖相環(huán)倍頻使其工作頻率最大可達(dá)70MHz,。圖中的U1為CAT1052,它為系統(tǒng)提供穩(wěn)定的復(fù)位電路,,同時為系統(tǒng)提供了256字節(jié)的可讀寫的E2PROM,,使系統(tǒng)存儲掉電不丟失數(shù)據(jù)空間,。
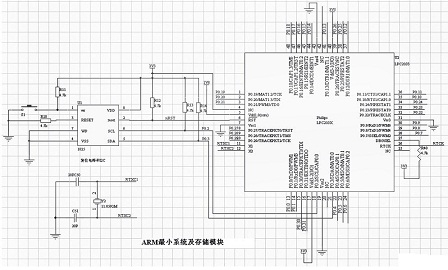
圖3 ARM最小系統(tǒng)及外部存儲電路圖,。
2.4 執(zhí)行電路
該設(shè)計的執(zhí)行電路如圖4所示,。其中PL端口接控制指示燈,PS1為AC220接口,,PS2為燈體接口,,PS3為電熱盤接口,網(wǎng)絡(luò)標(biāo)號KONG1和KONG2接ARM的兩個控制引腳,。當(dāng)ARM測到當(dāng)前溫度低于溫度曲線上的對應(yīng)溫度(即當(dāng)前需要加熱到的溫度)時ARM處理器便讓對應(yīng)的控制端口置零,,此時對應(yīng)的光電耦合器(US1或US2)的發(fā)射端工作,,使接收端導(dǎo)通,,這時電源電壓經(jīng)觸發(fā)二極管(DS1或DS2)和300Ω電阻后到達(dá)雙向晶閘管(QS1或QS2)的觸發(fā)極使其導(dǎo)通,這樣電熱盤或燈頭便開始加熱工作,。類似的道理,,當(dāng)ARM的控制端給出低電平時,對應(yīng)的可控硅截止,,燈頭或電熱盤停止加熱,。
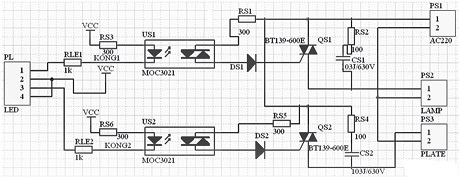
圖4 執(zhí)行模塊電路圖,。
2.5 人機(jī)交互界面
這部分作為人機(jī)接口,,主要實現(xiàn)與本設(shè)計系統(tǒng)的交流,由液晶顯示屏(128×64)和獨立鍵盤構(gòu)成,。操作者可通過鍵盤選擇功能,,讓系統(tǒng)執(zhí)行特定命令或進(jìn)入特定狀態(tài),而系統(tǒng)則通過液晶顯示屏告訴操作者其所處的狀態(tài)或溫度曲線,。從而實現(xiàn)可視性的人工操作與實時的輸出顯示,。
3 軟件設(shè)計
3.1 嵌入式實時操作系統(tǒng)μC/OS-II
μC/OS-II是一個基于搶占式的實時多任務(wù)內(nèi)核,可固化,、可剪裁,、具有高穩(wěn)定性和可靠性。實時操作系統(tǒng)的使用,,能夠簡化嵌入式系統(tǒng)的應(yīng)用開發(fā),,有效地確保穩(wěn)定性和可靠性,便于維護(hù)和二次開發(fā),,除此以外,,μC/OS-II的鮮明特點就是源碼公開,便于移植和維護(hù),,可裁剪性強(qiáng),。
編完程序在調(diào)試過程中經(jīng)常會遇到程序跑飛或陷入死循環(huán)等問題,,但本系統(tǒng)嵌入了μC/OS-II操作系統(tǒng),把整個程序分成多個任務(wù),,包括液晶屏顯示任務(wù),、鍵盤掃描任務(wù)、數(shù)據(jù)處理運(yùn)算任務(wù),、終端控制任務(wù),、溫度采集任務(wù),每個任務(wù)相對獨立,。然后在每個任務(wù)中設(shè)置超時函數(shù),,時間用完以后,任務(wù)必須交出CPU的使用權(quán),。即使一個任務(wù)發(fā)生問題,,也不會影響其它任務(wù)的運(yùn)行。這樣既提高了系統(tǒng)的可靠性,,也使得調(diào)試程序變得容易,。
當(dāng)然有利必有弊,在系統(tǒng)中嵌入μC/OS-II必將增加系統(tǒng)的開銷,,這需要系統(tǒng)有足夠的RAM空間,。在本系統(tǒng)中采用了ARM7(LPC2103),帶有8k的RAM,,再加上我們選擇操作系統(tǒng)的功能也不多(μC/OS-II操作系統(tǒng)可裁剪),,8k的RAM已足夠用。
3.2 程序流程圖
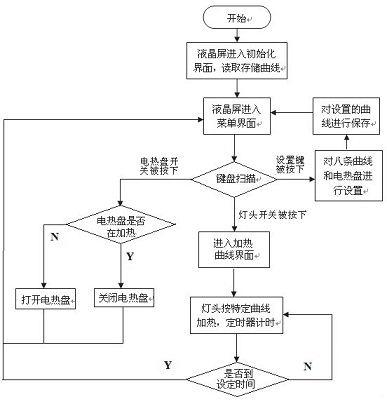
圖5 程序流程圖
4 結(jié)束語
本設(shè)計實現(xiàn)了以下幾個方面的功能:
(1)系統(tǒng)在軟件上以μC/OSII實時系統(tǒng)為系統(tǒng)平臺,,以ADS1.2為編譯器開發(fā)了適用于拆焊,、回流焊工業(yè)控制系統(tǒng)的軟件,軟件內(nèi)核采用多任務(wù)設(shè)計構(gòu)架,,將控制過程劃分成多個任務(wù),,按照優(yōu)先級的方式輪流工作,體現(xiàn)了實時系統(tǒng)任務(wù)分配合理,、響應(yīng)快,、可移植性好的優(yōu)點。
(2)控制策略方案綜合考慮了模糊控制和PID控制的特點,,針對模糊控制在控制精度上的不足,,采用模糊-PID混合控制的方式,充分發(fā)揚(yáng)兩種控制方法的優(yōu)點,,以適應(yīng)系統(tǒng)溫度受控對象慣性大,、滯后性強(qiáng)的特性,使系統(tǒng)在控制策略上有了很大的改善,。
(3)集回流焊爐和拆焊臺于一體,,使同一臺機(jī)子既能當(dāng)回流焊爐用,,又能當(dāng)拆焊臺用,提高了硬件利用率和性價比,。
(4)采用高精度智能8段可編程控制全程控制,,即開即用,無需預(yù)熱,,小巧多用,,增加了測溫補(bǔ)償功能,可在高溫度環(huán)境下穩(wěn)定運(yùn)行,。
電子時代的到來對回流焊機(jī),、拆焊臺的需求越來越大,因此多功能智能拆焊,、回流焊臺的設(shè)計將對電子工業(yè)的發(fā)展有很大的促進(jìn)作用,。