
意法半導(dǎo)體單ARM7處理器對(duì)無(wú)刷電機(jī)實(shí)施磁場(chǎng)定向控制
2011-01-22
作者:Vincent Onde 意法半導(dǎo)體
來(lái)源:電子產(chǎn)品世界
電機(jī)驅(qū)動(dòng)能效不論提高多少,都會(huì)節(jié)省大量的電能,這就是市場(chǎng)對(duì)先進(jìn)的電機(jī)控制算法的興趣日濃的部分原因。三相無(wú)刷電機(jī)主要指是交流感應(yīng)異步電機(jī)和永磁同步電機(jī)。這些電機(jī)以能效高、可靠性高、維護(hù)成本低、產(chǎn)品成本低和靜音工作而著稱。感應(yīng)電機(jī)已在水泵或風(fēng)扇等工業(yè)應(yīng)用中得到廣泛應(yīng)用,并正在與永磁同步電機(jī)一起充斥家電、空調(diào)、汽車或伺服驅(qū)動(dòng)器等市場(chǎng)。推動(dòng)三相無(wú)刷電機(jī)發(fā)展的主要原因有:電子元器件的價(jià)格降低,實(shí)現(xiàn)復(fù)雜的控制策略以克服本身較差的動(dòng)態(tài)性能成為可能。
以異步電機(jī)為例。簡(jiǎn)單的設(shè)計(jì)需要給定子施加三個(gè)120°相移的正弦波電壓,這些繞組的排列方式能夠產(chǎn)生一種旋轉(zhuǎn)磁通量。利用變壓器效應(yīng),這個(gè)磁通量在轉(zhuǎn)子籠內(nèi)感應(yīng)出一股電流,然后產(chǎn)生轉(zhuǎn)子磁通量。就是這兩種磁通量相互作用產(chǎn)生電磁力矩,使電機(jī)旋轉(zhuǎn)。在轉(zhuǎn)子上感應(yīng)出電流的條件是,確保轉(zhuǎn)子的轉(zhuǎn)速與定子的磁通量頻率不同;如果相同,轉(zhuǎn)子只經(jīng)歷一個(gè)恒定的磁通量,不會(huì)有感應(yīng)電流產(chǎn)生(楞次定律)。通電頻率和其產(chǎn)生的機(jī)械頻率之間的微小差異是異步電機(jī)命名的原因。一個(gè)三相交流電機(jī)實(shí)現(xiàn)轉(zhuǎn)速可調(diào)操作的最簡(jiǎn)單方式是,實(shí)現(xiàn)一個(gè)所謂的電壓/頻率控制(或者叫做標(biāo)量控制),其工作原理是在頻率與電機(jī)通電電壓之間保持恒比。這種方法產(chǎn)生一個(gè)恒定的定子磁通量,然后在轉(zhuǎn)子主軸上得到額定的電機(jī)力矩。對(duì)于應(yīng)用負(fù)載特性被大家了解的低成本驅(qū)動(dòng)器,以及控制帶寬要求不是很高的驅(qū)動(dòng)器,如數(shù)量很少的HP泵和風(fēng)扇、洗衣機(jī)等,這是一個(gè)很受歡迎的控制方法。一個(gè)MIPS不是很高并帶有合理的外設(shè)接口的8位單片機(jī)如ST7MC,即可滿足這種應(yīng)用需求,同時(shí)編程也很簡(jiǎn)單。
這種方法無(wú)法在瞬間工作過(guò)程中保證最佳的電機(jī)特性(力矩、能效)。而且為防止電機(jī)出現(xiàn)臨時(shí)消磁現(xiàn)象,還必須限制驅(qū)動(dòng)器反作用力的時(shí)間。為了克服這些限制條件,考慮到電機(jī)的動(dòng)態(tài)特性,市場(chǎng)上出現(xiàn)了其他的控制策略。磁場(chǎng)定向控制(也稱矢量控制)是應(yīng)用最廣泛的控制算法,目標(biāo)應(yīng)用包括帶式傳輸機(jī)、大功率水泵、汽車廢氣排放、工廠自動(dòng)化。這種方法允許用兩個(gè)去耦的控制變量(下文簡(jiǎn)稱Id和Iq)控制一個(gè)交流電機(jī),就像控制分開(kāi)勵(lì)磁的直流電機(jī)一樣。勵(lì)磁電流Id產(chǎn)生直流主磁通量,而Iq則控制力矩,功能與直流電機(jī)中的電樞電流一樣。當(dāng)負(fù)載發(fā)生變化時(shí),磁場(chǎng)定向控制能夠?qū)D(zhuǎn)速進(jìn)行精確的控制,響應(yīng)速度非常快,甚至在瞬間操作過(guò)程中,通過(guò)使定子和轉(zhuǎn)子的磁通量保持正交,可以優(yōu)化電機(jī)能效。這種方法可實(shí)現(xiàn)位置控制方案(通過(guò)瞬間力矩控制),在低速運(yùn)轉(zhuǎn)時(shí)釋放電機(jī)的全部力矩。
下面簡(jiǎn)要介紹一下磁場(chǎng)定向控制的工作原理。把參考坐標(biāo)系從固定的定子線圈換到運(yùn)動(dòng)的轉(zhuǎn)子磁通量坐標(biāo)系,采用兩個(gè)著名的變換運(yùn)算法則:Clarke變換和Park變換。Clarke變換是將120°相移三軸坐標(biāo)系(Ia, Ib, Ic)轉(zhuǎn)換成兩軸直角坐標(biāo)系(Ia, Ib);Park變換是將固定的 (Ia, Ib)坐標(biāo)系統(tǒng)轉(zhuǎn)換成與轉(zhuǎn)子相關(guān)的兩軸旋轉(zhuǎn)坐標(biāo)系(Id, Iq)。最后這兩個(gè)數(shù)值是直流或者變化緩慢的數(shù)值,采用簡(jiǎn)單的PI控制器方法可以調(diào)整這兩個(gè)數(shù)值。最后,利用逆變換(Park和Clarke逆變換)將其還原到固定的AC三相坐標(biāo)系,如圖1所示。
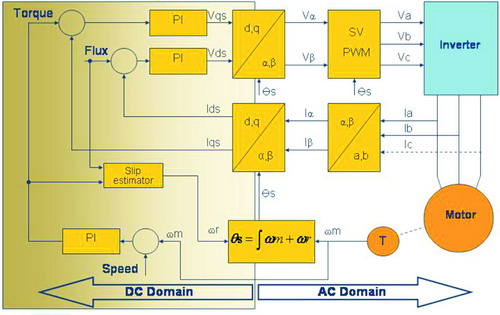
圖1 磁場(chǎng)定向控制的工作原理
在各種矢量控制方法中,我們采用一個(gè)間接磁場(chǎng)定向控制方法,唯一測(cè)量和處理的電機(jī)模型參數(shù)是轉(zhuǎn)子時(shí)間常數(shù)Lr/Rr(在轉(zhuǎn)差估算器模塊內(nèi))。如果電機(jī)是一個(gè)永磁同步電機(jī),結(jié)構(gòu)框圖和相應(yīng)的功能將會(huì)非常相似,不再需要轉(zhuǎn)差估算器,磁通量命令可以設(shè)定為零(磁鐵自己產(chǎn)生磁通量)。算法只是這項(xiàng)工作的一部分:只要計(jì)算出電壓電平,就必須將其轉(zhuǎn)換成伏特和安培。像在任何一個(gè)現(xiàn)代功率電子系統(tǒng)一樣,這個(gè)電機(jī)控制系統(tǒng)由肌肉(功率轉(zhuǎn)換器)和大腦(單片機(jī))組成。驅(qū)動(dòng)功率轉(zhuǎn)換器(俗稱逆變器)是由三個(gè)PWM輸出驅(qū)動(dòng)。從圖2中不難看出,一個(gè)功率強(qiáng)大的三路緩沖器將一個(gè)0-5V的邏輯信號(hào),轉(zhuǎn)變成一個(gè)0-300V的方波信號(hào),施加到電機(jī)端子上。電機(jī)的繞組電感起到一個(gè)低通濾波器的作用:去除載波頻率,平滑電流變化,形成一個(gè)正弦電流波形,即PWM調(diào)制的波形。
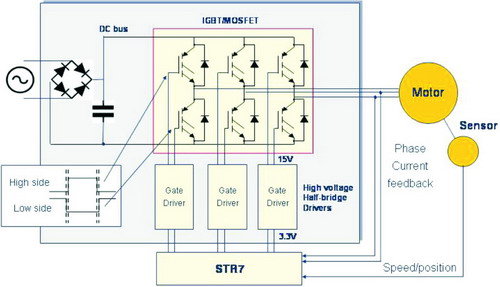
圖2 電機(jī)控制系統(tǒng)
讓我們從CPU開(kāi)始逐個(gè)查看一個(gè)先進(jìn)的電機(jī)驅(qū)動(dòng)器系統(tǒng)的整體需求。整個(gè)矢量控制算法必須連續(xù)反復(fù)計(jì)算,計(jì)算速度在1~10 kHz之間(1ms一直到100μs閉環(huán)時(shí)間,視最終應(yīng)用的帶寬而定)。系統(tǒng)需要大量的數(shù)學(xué)計(jì)算(三角函數(shù)、PID調(diào)整器、實(shí)時(shí)磁通量和基于電機(jī)參數(shù)的力矩估算)。此外,必須給應(yīng)用的其余部分(通信、用戶界面等)的計(jì)算留有余地。為了不限制動(dòng)態(tài)性能,主要控制變量需要最低16位的精度,中間結(jié)果需要32位計(jì)算能力。所有這些因素說(shuō)明了矢量控制必須使用高速、高性能處理器的原因。市場(chǎng)現(xiàn)有產(chǎn)品包括16位或32位單片機(jī)、混合控制器或數(shù)字信號(hào)處理器,這些產(chǎn)品通常與先進(jìn)的電機(jī)控制直接相關(guān),如果你不是刻意追求速度最快的數(shù)字電流控制回路或最精確的曲線控制,一個(gè)基于ARM7處理器的解決方案剛好滿足磁通量定向控制的要求。除核心的性能外,若想最大限度減少外部組件,還需配備合理的外設(shè)接口。這樣設(shè)計(jì)可大大簡(jiǎn)化設(shè)計(jì)過(guò)程,確保成本效益和可靠性(因?yàn)镻CB設(shè)計(jì)被簡(jiǎn)化)。
在信號(hào)生成方面,通用PWM通道是不適合的,必須使用電機(jī)控制專用PWM信號(hào),因此必須采用三對(duì)同步互補(bǔ)PWM通道,含有死區(qū)時(shí)間插入功能,以防止半橋可能發(fā)生短路故障。為安全起見(jiàn),當(dāng)功率級(jí)出現(xiàn)故障/錯(cuò)誤(過(guò)流、高溫)時(shí),必須同時(shí)關(guān)閉這6路PWM通道。安全功能還配備一個(gè)專用的緊急故障輸入。定時(shí)器的時(shí)鐘頻率(典型值>50MHz)和PWM載波頻率的三角波形才是確保正弦波形的高精度和最佳的噪聲-開(kāi)關(guān)損耗比的兩個(gè)因素,而非鋸齒波形。
模擬信號(hào)采集是MCU的另一個(gè)主要負(fù)荷,電機(jī)監(jiān)控必須控制兩類信號(hào):緩慢變化的信號(hào)如DC總線電壓(含有100Hz波紋電壓成分)或電位器電壓;高動(dòng)態(tài)的頻率范圍幾赫茲到數(shù)百赫茲的電機(jī)電流,其中含有PWM速率(典型值高于10 kHz)的波紋電流。因此,模數(shù)轉(zhuǎn)換器的速度必須很快(低于5μs),以便在對(duì)電機(jī)相位進(jìn)行順序采樣時(shí),減少對(duì)不平穩(wěn)電流的測(cè)量,節(jié)省為等候模數(shù)轉(zhuǎn)換結(jié)果而在PWM中斷服務(wù)程序上消耗的時(shí)間。在轉(zhuǎn)換器精度方面,10位正在成為轉(zhuǎn)換器的標(biāo)準(zhǔn)。雖然8位轉(zhuǎn)換器對(duì)大多數(shù)應(yīng)用已經(jīng)夠用,但是電流范圍擴(kuò)大的應(yīng)用需要10位以上的模數(shù)轉(zhuǎn)換器,以便在各種負(fù)載條件下保證充足的分辨率。此外,控制精度與模數(shù)轉(zhuǎn)換器的質(zhì)量有直接的關(guān)系。
最后,我們還必須處理轉(zhuǎn)速和/或位置傳感器。遞增編碼器位置傳感器需要專用的信號(hào)調(diào)節(jié)功能,作為一個(gè)具有加減計(jì)數(shù)功能的外部時(shí)鐘,來(lái)處理兩個(gè)正交信號(hào)輸出。處理這個(gè)功能的是一個(gè)含有專用編碼器模式的定時(shí)器。
我們?cè)?a class="innerlink" href="http://forexkbc.com/tags/STR730" title="STR730" target="_blank">STR730單片機(jī)上成功地實(shí)現(xiàn)了一個(gè)帶傳感器的磁場(chǎng)定向控制(基于轉(zhuǎn)速生成器)算法,該單片機(jī)基于ARM7TDMI處理器,工作頻率32MHz,內(nèi)嵌閃存。這個(gè)算法完全采用C語(yǔ)言開(kāi)發(fā),沒(méi)有進(jìn)行任何刻意的代碼優(yōu)化。在實(shí)際算法中,完成整個(gè)控制回路用時(shí)55μs,在3kHz采樣速率下CPU負(fù)荷17%。當(dāng)核心運(yùn)行在60MHz時(shí),預(yù)計(jì)執(zhí)行時(shí)間低于20μs。采用ARM7處理器實(shí)現(xiàn)的算法具有很多優(yōu)點(diǎn)。首先,ARM現(xiàn)已成為標(biāo)準(zhǔn)核心,其平臺(tái)方法和大量的開(kāi)發(fā)工具是節(jié)省成本的關(guān)鍵所在;其次,假如下一代產(chǎn)品設(shè)計(jì)需要更高處理速度(MIPS),你可以直接升級(jí)到基于ARM9的產(chǎn)品。從架構(gòu)的角度看,桶形移位器很有趣,它允許在整個(gè)處理流程中優(yōu)化變量分辨率。你可以在一個(gè)時(shí)鐘周期內(nèi)改變格式以達(dá)到限制處理時(shí)間的目的,此外,它允許利用常數(shù)節(jié)省某些乘法運(yùn)算,例如r0=(r1<<4) - r1相當(dāng)于r0=15xr1,甚至速度更快。低成本的DSP有16位固點(diǎn)核心。當(dāng)必須處理PI調(diào)整器的積分項(xiàng)或擴(kuò)展所需的精度范圍時(shí),ARM7的32位數(shù)據(jù)通道能夠避免多個(gè)16位負(fù)載。當(dāng)進(jìn)行電機(jī)控制信號(hào)處理時(shí),DSP的其他重要功能沒(méi)有太大的用途,例如,硬件閉環(huán)和雙尋址模式。這些在某種程度上說(shuō)明了人們?yōu)槭裁窗袮RM7處理器喻成如此優(yōu)化的架構(gòu)。
圖3所示是一個(gè)新的STR7產(chǎn)品,為ST的基于ARM7處理器的產(chǎn)品線開(kāi)發(fā),能夠滿足前文概述的系統(tǒng)需求。主要特性包括:
* SPTimer同步PWM定時(shí)器,執(zhí)行高端PWM信號(hào)生成功能,基于16位定時(shí)器,時(shí)間分辨率可降至16.6ns,實(shí)現(xiàn)最佳的電壓重建;
* 能夠產(chǎn)生居中或邊緣對(duì)齊的PWM圖形;
* 逆變器故障處理所需的內(nèi)部可編程死區(qū)時(shí)間信號(hào)生成器和緊急故障保護(hù)功能;
* 為簡(jiǎn)化軟件處理任務(wù),采用多個(gè)中斷源、一個(gè)可編程重載速率和“禁止吸煙”保護(hù),以防止軟件因?yàn)槭Э囟薷南到y(tǒng)重要外設(shè)的配置寄存器。

圖3 新的STR7產(chǎn)品
這個(gè)SPTimer還可作為通用定時(shí)器,帶有兩個(gè)輸入捕獲引腳、兩個(gè)輸出比較引腳,以及可最大限度降低軟件開(kāi)銷的編碼器專用模式。該模式具有x2或x4分辨率、方向自動(dòng)管理,可以給所選編碼器的線數(shù)編程,因此可從計(jì)數(shù)寄存器直接讀取轉(zhuǎn)子角位信號(hào)。針對(duì)電流測(cè)量功能,新產(chǎn)品內(nèi)置一個(gè)具有自動(dòng)掃描功能的3μs 10位模數(shù)轉(zhuǎn)換器。主要外設(shè)接口包括多個(gè)定時(shí)器、通信接口等。考慮到單片機(jī)處理的非電機(jī)控制性任務(wù),我們?cè)陔娐钒迳显O(shè)計(jì)了智能外設(shè),像連接端子、功率因數(shù)校正、耗能制動(dòng)等。
意法半導(dǎo)體集中全力開(kāi)發(fā)電機(jī)控制市場(chǎng),是世界僅有的幾家有能力提供完整的電機(jī)控制產(chǎn)品組合的供應(yīng)商之一,產(chǎn)品范圍從快速二極管到處理器,包括高壓柵驅(qū)動(dòng)器和開(kāi)關(guān)。為滿足更加節(jié)能的“綠色” 電機(jī)和高性能驅(qū)動(dòng)器的需求,我們打造了一個(gè)以ARM為核心的完整產(chǎn)品線,幫助設(shè)計(jì)人員揭開(kāi)向量控制算法的神秘面紗。這種控制方法很快就會(huì)把今天的主流的DSP式控制淘汰出局。推廣應(yīng)用一個(gè)新的控制方法:既然使用以ARM為核心的標(biāo)準(zhǔn)單片機(jī)就能滿足先進(jìn)的電機(jī)控制需求,有誰(shuí)還肯再花費(fèi)時(shí)間在專有的架構(gòu)上實(shí)現(xiàn)先進(jìn)的電機(jī)控制呢?