
一,、引言:
在高速線材生產(chǎn)中,,飛剪控制系統(tǒng)" title="控制系統(tǒng)">控制系統(tǒng)是生產(chǎn)線的重要組成部分,其可靠性直接影響到生產(chǎn)效率及經(jīng)濟(jì)效益,。本文針對(duì)沙鋼榮盛高線3#飛剪控制系統(tǒng)在軋制Φ8,、Φ10規(guī)格高速線材為提高軋制節(jié)奏而改變生產(chǎn)工藝后出現(xiàn)的常見問題進(jìn)行討論。
二,、系統(tǒng)概述:
1,、系統(tǒng)控制原理
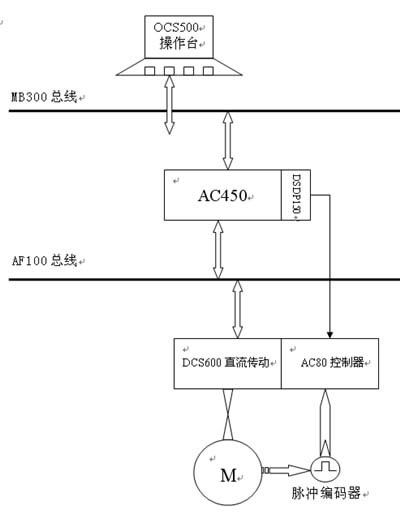
3#飛剪由ABB提供的小型控制器AC80控制,通過一臺(tái)DCS600直流傳動(dòng)裝置實(shí)現(xiàn)對(duì)飛剪的同步定位,、切頭切尾,、故障剪切等功能。其控制還通過與軋線控制相關(guān)總線MB300,、AF100與主控臺(tái)" title="主控臺(tái)">主控臺(tái)OCS500系統(tǒng),、軋線AC450 PLC實(shí)現(xiàn)數(shù)據(jù)交換,從而達(dá)到遠(yuǎn)程操作,、主控臺(tái)參數(shù)設(shè)定,、實(shí)時(shí)提供報(bào)警等一系列功能,。其控制網(wǎng)絡(luò)圖見圖1。
2,、飛剪動(dòng)作概述
該飛剪由一臺(tái)西門子214kW的直流電機(jī)拖動(dòng),,其軸編碼器把飛剪位置信號(hào)精確傳送至傳動(dòng)裝置作為反饋,當(dāng)1#傳感器檢測(cè)" title="傳感器檢測(cè)">傳感器檢測(cè)到軋件頭部信號(hào)或PLC接收到的預(yù)精軋14#軋機(jī)的咬鋼信號(hào)后,,PLC依照剪切長(zhǎng)度及預(yù)精軋各軋機(jī)出口速度進(jìn)行精確頭部剪切延時(shí)計(jì)算,、同時(shí)依照主控臺(tái)設(shè)定的超前量等計(jì)算飛剪速度參考值,并正確向傳動(dòng)裝置裝載控制字及速度設(shè)定值,,一旦頭部由2#傳感器觸發(fā)后即按所計(jì)算的延時(shí)動(dòng)作剪切并借助飛剪剪切傳動(dòng)臂將軋件引入精軋機(jī)組,。其尾部剪切動(dòng)作類同于頭部控制,主要用于剪切尾部壞料,,該功能正常軋制時(shí)不用,;對(duì)于故障切廢時(shí)則在第一時(shí)間觸發(fā)動(dòng)作將軋件引向碎斷剪。其控制流程見圖2,。
3,、故障現(xiàn)象
3#飛剪在正常生產(chǎn)過程主要用于切頭并導(dǎo)入精軋機(jī),其常見故障表現(xiàn)為提前切頭或不切頭,,一般情況下屬于跟蹤信號(hào)出錯(cuò)或1#,、2#傳感器信號(hào)" title="傳感器信號(hào)">傳感器信號(hào)不佳引起。本章著重討論另一個(gè)故障即剪切后堆廢,,從故障現(xiàn)象上分析就是軋件在3#剪剪切后遇到某種阻力造成頭部彎曲而堆鋼,。
三、故障原因分析
1,、3#飛剪出現(xiàn)的撞頭子現(xiàn)象多數(shù)是由于飛剪后轉(zhuǎn)轍器不平或飛剪出現(xiàn)鈍口及新更換剪刃后間隙未調(diào)整到位所至,。在這種情況下就需要機(jī)械維護(hù)人員加強(qiáng)檢查即可排除,但生產(chǎn)中多數(shù)故障還不排除為電氣原因所引起,。
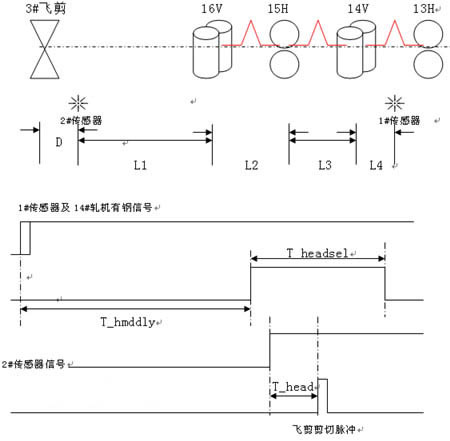
T_hmddly=L4/v13+L3/v14+L2/v15+L1/v16
T_head=(D+L_head+l_correction)/v16-t_start
其中T_headsel為一個(gè)固定的時(shí)間,,飛剪觸發(fā)動(dòng)作必須在其時(shí)間段內(nèi)方能動(dòng)作以防止誤動(dòng)作。L_head為主控臺(tái)設(shè)定切頭長(zhǎng)度,,l_correction為補(bǔ)償長(zhǎng)度,,t_start為飛剪起動(dòng)時(shí)間。
2,、由于3#飛剪出現(xiàn)撞頭子現(xiàn)象比較偶然,,從現(xiàn)場(chǎng)操作人員反映的情況來(lái)看多數(shù)為速度不穩(wěn)定,在故障出現(xiàn)的時(shí)候好象3#飛剪的剪切速度比正常剪切時(shí)明顯要慢,,為此主控臺(tái)也針對(duì)這種故障把飛剪的超前量加大,,最大時(shí)超前量達(dá)到23%左右,但在實(shí)際生產(chǎn)過程中仍出現(xiàn)此類故障,。
此外電氣人員也對(duì)飛剪的設(shè)定速度和實(shí)際速度進(jìn)行了跟蹤比較,,同樣未能發(fā)現(xiàn)有何異常,,此間我們還對(duì)傳動(dòng)柜速度反饋的相關(guān)參數(shù)進(jìn)行了優(yōu)化并更換了編碼器及計(jì)數(shù)模板,同樣收效甚微,。
由于3#飛剪這種故障在生產(chǎn)過程中屢次發(fā)生,,其造成的切廢量及由此產(chǎn)生的熱停工時(shí)間日益增加,已成為制約生產(chǎn)的一大因素,,為此工段領(lǐng)導(dǎo)責(zé)成對(duì)3#飛剪故障進(jìn)行攻關(guān),。
四、問題的發(fā)現(xiàn)及解決
3#飛剪在最初的生產(chǎn)階段中從未出現(xiàn)過這種故障,,在確認(rèn)機(jī)械設(shè)備及電氣傳動(dòng)及速度反饋正常的情況下仍出現(xiàn)剪切后堆鋼說(shuō)明問題還在現(xiàn)場(chǎng)某個(gè)環(huán)節(jié)上,。經(jīng)過對(duì)前一段時(shí)間出現(xiàn)故障的數(shù)據(jù)記錄進(jìn)行統(tǒng)計(jì),我們發(fā)現(xiàn)這種故障都出現(xiàn)在軋制Φ8,、Φ12兩種規(guī)格過程中,,這里必須提到的是:我們高線廠為了提高生產(chǎn)節(jié)奏及設(shè)備運(yùn)轉(zhuǎn)率對(duì)Φ8,、Φ12兩種規(guī)格產(chǎn)品的生產(chǎn)工藝進(jìn)行了修正,,其中預(yù)精軋的13#、14#兩臺(tái)機(jī)架空過,,其相應(yīng)的活套也取消不用,,而3#飛剪的剪切動(dòng)作及速度設(shè)定就與其中的相關(guān)信號(hào)有著千絲萬(wàn)縷的聯(lián)系,問題肯定就出在這里,。
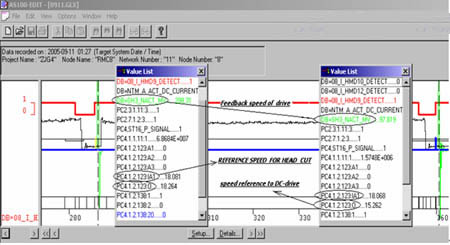
對(duì)此我們采用ABB提供的AS100-EDIT應(yīng)用軟件全程對(duì)3#飛剪剪切動(dòng)作的相關(guān)信號(hào)進(jìn)行跟蹤,,最終我們?cè)谝淮物w剪剪切的故障記錄中發(fā)現(xiàn)了故障點(diǎn),在PLC掃描的記錄中我們不難發(fā)現(xiàn)故障剪切時(shí)由PLC發(fā)送至傳動(dòng)柜的速度設(shè)定值不是我們的頭部剪切速度給定值,,該速度參照量(線速度)明顯在比正常剪切的速度要慢3m/s,,如圖3中標(biāo)注示意。
結(jié)合對(duì)飛剪控制程序的進(jìn)一步研究我們發(fā)現(xiàn)其故障剪切速度實(shí)際上是裝載了尾部剪切的設(shè)定值,。為什么頭部剪切時(shí)反而使用了尾部剪切的速度呢,?在生產(chǎn)Φ8、 Φ12兩種規(guī)格產(chǎn)品過程中由于工藝的改變,,其觸發(fā)頭部剪切的兩個(gè)信號(hào)中有一個(gè)已丟失了,,即14#軋機(jī)有鋼信號(hào)沒有,所以正常軋制時(shí)只能靠1#傳感器的信號(hào)來(lái)控制,,由于現(xiàn)場(chǎng)環(huán)境因素及保養(yǎng)不到位的影響,,1#傳感器難免會(huì)出現(xiàn)信號(hào)閃爍的現(xiàn)象,如果恰巧在頭部剪切前出現(xiàn)則導(dǎo)致裝載尾部剪切設(shè)定值,。
對(duì)癥下藥則一切水到渠成,,通過對(duì)飛剪控制程序作一定優(yōu)化后,我車間再未因1#傳感器信號(hào)原因而造成飛剪剪切后堆鋼,,Φ8,、Φ12高速線材的生產(chǎn)步入新臺(tái)階,。