摘 要:介紹了永磁式同步電機、變頻器、PLC組成的伺服系統(tǒng),并指出了該系統(tǒng)需要關注的幾個問題。
關鍵詞:永磁式電機;變頻器;PLC
永磁式同步電機組成的伺服系統(tǒng)常用于快速、準確、精密的位置控制場合,電機體積小、質量輕、效率高,轉子無發(fā)熱問題。洛陽石化短纖維車間絲束落桶裝置,采用兩臺永磁式同步電機,分別拖動輥輪架小車左右往復和輥輪前后往復運動,從而使落到輥輪上絲桶里的絲束鋪放均勻。本文將對采用西門子6FK型永磁式同步電機,西門子6SE70系列小型交一直一交變頻器,S7—300PLC組成的系統(tǒng)進行詳細的介紹,并指出運行維護中出現(xiàn)的問題,以供大家參考。
1 基本情況
落桶裝置的簡單示意圖如圖1所示。
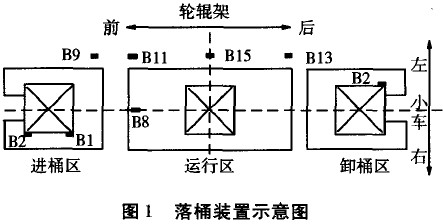
整個生產(chǎn)區(qū)域分為三個區(qū):進桶區(qū)、卸桶區(qū)、運行區(qū)。在運行區(qū),小車左右往復運動,B8接近開關是它的行程中心校準點。輪輥前后運動,B15接近開關是它的行程中心校準點。進桶區(qū),空桶用搬運車放至進桶位時,B2接近開關點亮,人桶電機啟動,空桶進行至B1接近開關后人桶電機停止。絲束落桶選擇的周期時間到時后,小車快速校準于中間位置制動靜止;輥輪變速拖動滿桶向前運行,到達向前運動設定最遠行程后,人桶電機啟動,空桶上輪架。輪輥向后運動時拖動滿、空兩桶,B13光電開關激活時,出桶電機啟動,引導滿桶至卸桶區(qū)。B13光電開關檢測到滿、空桶兩者之間的空隙時,輪輥電機制動開始向后運動。滿桶至B3接近開關后,出、人桶電機同時停止運行。一個完整的生產(chǎn)循環(huán)周期結束,重新計時開始。
2 伺服系統(tǒng)的硬件組成
該系統(tǒng)的人機端面采用西門子OP27操作面板,它與西門子S7—300PLC交換信息,并向其發(fā)出控制指令。PLC軌架上組合有西門子S7—315型CPU,兩塊FM350計數(shù)模塊,數(shù)字輸人、輸出模塊,通訊模塊等。S7—300CPU與兩臺西門子6SE70系列小型交一直一交變頻器串級通訊聯(lián)接,完成對輪輥、小車電機運動的方向、速度變化的控制。計數(shù)模塊接收6SE70變頻器端子排414上的脈沖信號,收集計算同步電機的方向、速度值。PLC輸人模塊引人信號有該系統(tǒng)的自動/手動選擇按鈕,接近開關、光電開關反饋的信號等。輸出模塊發(fā)出指令,控制總開關,變頻器的輸出接觸器,人、出桶電機接觸器的閉斷等。
3 永磁式同步電機的自控方式
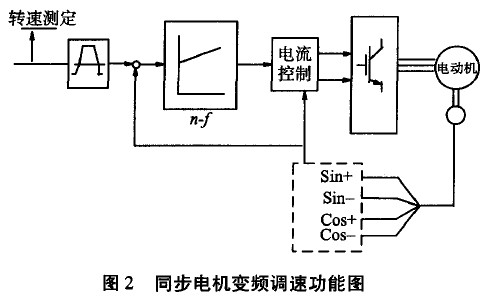
永磁式同步電機在變頻器的作用下,逐漸升頻完成啟動,其自控式變頻調速系統(tǒng)功能圖如圖2所示。該系統(tǒng)把來自測速機的信號進行分析,判明同步電機轉子的真實位置和轉速后,控制變頻器輸出三相電壓、電流的頻率,幅值和初始相位,達到同步轉速跟蹤轉子轉速的目的。
3.1 測速機的信號
測速機的轉子與同步電機的轉子同軸連結,定子上激磁線圈上施加10V(2—10KZ)的電源,二組輸出線圈的信號分別稱作為sinψ、cosψ信號,兩者即時值的正切值即為同步電機轉子的真實位置指示。
3.2 雙閉環(huán)控制中速度信號的作用
西門子6SE70系列小型交一直一交變頻器CU—VC控制板上選插用了resolver模板,該模板收集測速機的兩組信號,經(jīng)分析、計算,直接作用于速度、電流雙閉環(huán)的調速系統(tǒng)中。計算出的轉速值與輸入速度值比較放大作為給定值;測量計算出的轉子位置瞬間值作用于電流環(huán)三相電流的瞬間相位值給定。
3.3 PLC程度中速度信號的作用
模板計算出的速度脈沖值同時輸出連接到了S7—300PLC系統(tǒng)中的計數(shù)模板FM350。PLC與計數(shù)模塊的數(shù)據(jù)通訊,可在數(shù)據(jù)塊中實現(xiàn)對電機的運行位置、位移的計算記錄。組態(tài)在PLC的上一級OP操作面板上顯示小車、輥子的位置和速度,方便操作工選擇恰當?shù)妮斎脒x擇值。
3.4 GRAPH編程語言實現(xiàn)的順序控制
在STEP7組態(tài)的軟硬件系統(tǒng)中,功能塊FB61應用了GRAPH編程語言實現(xiàn)了對小車及輥子的順序控制,GRAPH編程語言可以很方便地選擇設定每個步驟的啟動條件。在功能塊FB61中,換桶順序控制大致可分為4個階段:①判斷無急停、聯(lián)鎖,建立換桶順序控制的起始標志;②小車左右往復,輥子前后往復位移;③小車快速校準于中間位;④輥子變速運動,入、出桶電機啟停。
4 該系統(tǒng)運行中需關注的兩個問題
4.1 測速機的準確定位安裝
測速機的定子固定卡緊鏍絲的安裝位置可以是任意的。但在檢修打開同步電機時,必須精確標記測速機定子碼盤在同步電機定子上的安裝角度。定子碼盤的安裝角度不準確,測速兩組輸出信號發(fā)生畸變,同步電機會因此速度波動,溫度升高。嚴重時速度失控或者電機因溫度過高而匝間短路燒毀。
4.2 運行周期時間的選擇限制
理論上講,該系統(tǒng)的運行周期時間設定選擇可以是任意無間斷的。實際生產(chǎn)當中,我們被迫采用43~46min、54~56min等時間段內選擇設定運行周期時間,來保證換桶時小車從左側向中間變速靠近制動定位,從而使換桶過程平穩(wěn)完成。這是因為入桶電機采用鏈條驅動,電機在啟動和正常運轉時,鏈條的張緊度不一樣,從而使空桶向運行區(qū)的路線變直線稍偏離中心線,進而造成空桶不能順利跟桶上至小車輪架上,撞擊小車輪架聯(lián)鎖停車。我們發(fā)現(xiàn),空桶用拖運車放到進桶區(qū)時斜線置放,可以緩解進桶電機驅動變線的缺陷;但同時輪架小車從左側和右側向中間位準確制動定位時也存在制動位有允許的偏差變化;因此我們被迫限制了運行時間周期的選擇,來保證輪架小車從左側位向中間變速靠近制動定位,進而確保空桶平穩(wěn)運行至小車輪架上。
綜上所述,同步電機有著異步電機無可比擬的優(yōu)越性,隨著微電子控制的快速發(fā)展,其應用將更加廣泛。
