
直接轉(zhuǎn)矩控制(DTC)交流調(diào)速技術(shù)是繼矢量控制變頻之后發(fā)展起來的一種新型的具有高性能的變頻調(diào)速技術(shù)。DTC借助瞬時空間矢量理論在定子靜止坐標(biāo)系下計算電動機(jī)的磁鏈和轉(zhuǎn)矩,通過轉(zhuǎn)矩兩點(diǎn)式調(diào)節(jié)器把轉(zhuǎn)矩檢測值與給定值做滯環(huán)的比較,把轉(zhuǎn)矩波動限制在一定的容差范圍內(nèi),其控制效果取決于轉(zhuǎn)矩的實(shí)際狀況,具有結(jié)構(gòu)簡單和動態(tài)響應(yīng)快的優(yōu)點(diǎn)。
異步電機(jī)的狀態(tài)方程是一組非線性方程,根據(jù)系統(tǒng)辨識理論,對非線性系統(tǒng)" title="非線性系統(tǒng)">非線性系統(tǒng)狀態(tài)估計的最好方法是擴(kuò)展卡爾曼濾波" title="卡爾曼濾波">卡爾曼濾波。本文以定子電流和轉(zhuǎn)子磁鏈為狀態(tài)變量,將角速度作為估算的參數(shù),利用擴(kuò)展卡爾曼濾波(EKF)方法估算異步電機(jī)的角速度和轉(zhuǎn)子磁鏈,由此建立異步電機(jī)無速度直接轉(zhuǎn)矩控制系統(tǒng)。
1 擴(kuò)展卡爾曼濾波器
卡爾曼濾波是60年代發(fā)展起來的一種現(xiàn)代濾波方法,它的一個重要作用在于系統(tǒng)的狀態(tài)估計。當(dāng)噪聲是正態(tài)分布情況時,這種濾波給出了狀態(tài)的最小方差估計,當(dāng)不是正態(tài)分布情況時,這種濾波給出了狀態(tài)的線性最小方差估計。卡爾曼濾波算法是一種應(yīng)用于線性系統(tǒng)中的迭代估計算法,為了能夠在非線性的感應(yīng)電機(jī)模型中應(yīng)用卡爾曼濾波算法,首先需要將非線性系統(tǒng)線性化" title="線性化">線性化。通過對非線性函數(shù)" title="非線性函數(shù)">非線性函數(shù)的Talor展開式進(jìn)行一階線性化截斷,從而將非線性問題轉(zhuǎn)化為線性問題。
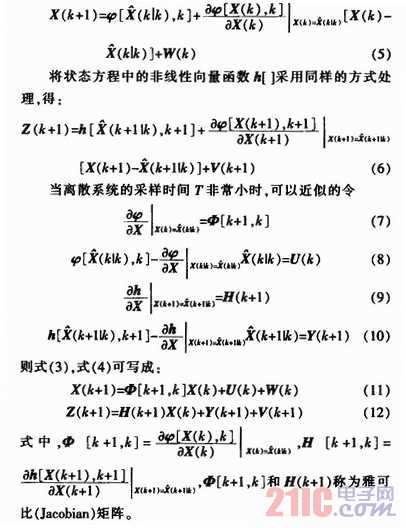
一般非線性系統(tǒng)模型為:
![]()
式中,W(t)和V(t)分別稱為系統(tǒng)噪聲矩陣和測量噪聲矩陣。測量噪聲矩陣由測量的不準(zhǔn)確性造成,一般W(t)和V(t)都被假設(shè)為零均值的高斯白噪聲,其方差矩陣分別為Q和R。
對上式的離散隨機(jī)非線性系統(tǒng),可以寫為

式中,ψ[]為n維向量非線性函數(shù);h[]為m維向量非線性函數(shù)。
將離散隨機(jī)非線性系統(tǒng)狀態(tài)方程式中的非線性向量函數(shù)ψ[]圍繞濾波值![]() 展開成泰勒級數(shù),并略去二次以上項(xiàng),得:
展開成泰勒級數(shù),并略去二次以上項(xiàng),得:
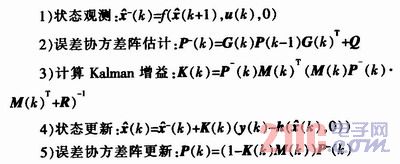
這樣,非線性系統(tǒng)的狀態(tài)估計問題就轉(zhuǎn)化為線性系統(tǒng)的狀態(tài)估計問題了,按照卡爾曼濾波的推演方法,得到EKF算法步驟如下:
EKF算法在電機(jī)狀態(tài)估計中的應(yīng)用如圖1所示。
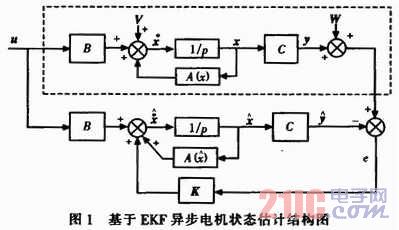
圖1上半部分的虛框內(nèi)表示的是電動機(jī)實(shí)際狀態(tài),下半部分是EKF狀態(tài)估計框圖,符號“^”表示狀態(tài)矢量估計,K為EKF增益矩陣。
2 利用EKF進(jìn)行轉(zhuǎn)子轉(zhuǎn)速估計
異步電機(jī)在兩相靜止α、β坐標(biāo)下的數(shù)學(xué)模型:

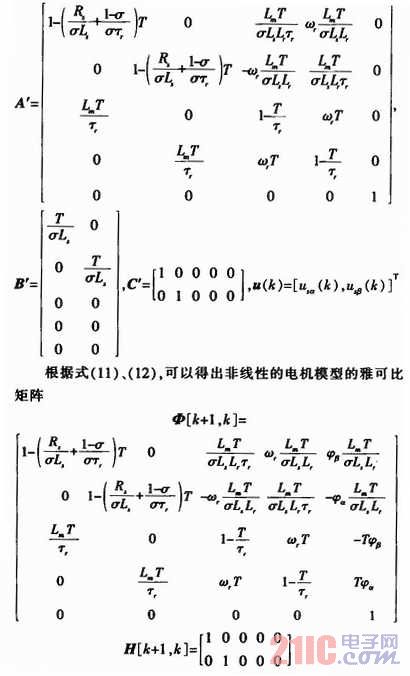
這樣就得到了離散化及線性化處理后的適合進(jìn)行卡爾曼濾波運(yùn)算的函數(shù)表達(dá)式,可以代入EKF算法進(jìn)行迭代運(yùn)算。
3 EKF建模與DTC系統(tǒng)仿真
本文的仿真和建模是在Matlab7.O的Simulink環(huán)境下完成的,主要包括異步電動機(jī)模型、轉(zhuǎn)矩調(diào)節(jié)器、磁鏈調(diào)節(jié)器、磁鏈自控制、開關(guān)信號選擇單元,其中擴(kuò)展卡爾曼濾波模塊是由S函數(shù)編寫。
感應(yīng)電機(jī)參數(shù)如下:定子自感Ls=0.610 8 H,轉(zhuǎn)子自感Lr=0.607 9 H,定、轉(zhuǎn)子互感Lm=0.593 2 H,定子相繞組電阻Rs=3.67 Ω,轉(zhuǎn)子相繞組電阻Rr=2.613 Ω,轉(zhuǎn)動慣量J=0.027 5kg·m2,極對數(shù)p=2。
為驗(yàn)證該系統(tǒng)的精、動態(tài)性能,系統(tǒng)空載啟動,設(shè)定轉(zhuǎn)速為100 rad/s,進(jìn)入穩(wěn)定后,在t=0.5 s時加入負(fù)載TL=5 N·m,仿真圖如圖2~圖5所示。
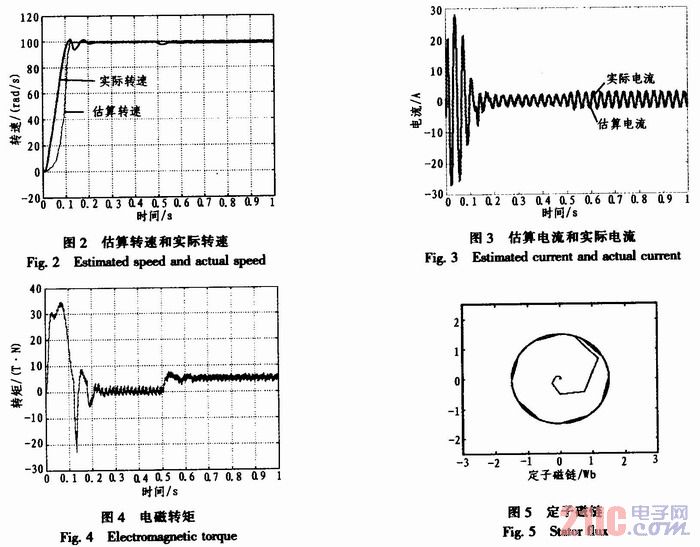
從仿真波形圖2對比可以看出,采用無速度傳感器" title="無速度傳感器">無速度傳感器控制算法后控制過程的上升時間比有速度傳感器控制稍微長一些,但仍能滿足系統(tǒng)性能指標(biāo)要求。系統(tǒng)進(jìn)入穩(wěn)定后無速度傳感器控制的效果和有傳感器控制是一致的。圖4顯示的是突加負(fù)載后,從圖3看出定子電流幅值穩(wěn)定,轉(zhuǎn)速變化很小并很快恢復(fù)穩(wěn)定,輸出轉(zhuǎn)矩能很快達(dá)到給定負(fù)載轉(zhuǎn)矩,體現(xiàn)了DTC控制系統(tǒng)轉(zhuǎn)矩響應(yīng)快的特點(diǎn),由此可見電機(jī)在運(yùn)行過程中,受到各種擾動時,電機(jī)轉(zhuǎn)速穩(wěn)定性好,可以滿足對控制特性的要求。
EKF算法在異步電機(jī)轉(zhuǎn)子速度估計的應(yīng)用過程中采用直接更新系統(tǒng)狀態(tài)量和協(xié)方差矩陣的方法,可以避免直接計算最大值動態(tài)范圍較大的增益矩陣Kk。利用EKF算法的關(guān)鍵在于協(xié)方差矩陣Q和R的選取。Q與模登誤差、系統(tǒng)分布、A/D量化誤差有關(guān);R與電流傳感器噪聲以及A/D變換器的編碼誤差有關(guān)。
4 結(jié)論
從算法分析和系統(tǒng)仿真分析討論的結(jié)果,可以得出擴(kuò)展卡爾曼算法在無速度傳感器應(yīng)用中的優(yōu)點(diǎn)是:利用擴(kuò)展卡爾曼濾波器可以不必了解電機(jī)的機(jī)械參數(shù)知識(可以克服電機(jī)參數(shù)反應(yīng)靈敏的問題),在電機(jī)啟動過程中不必知道電機(jī)轉(zhuǎn)子初始位置(可以解決電機(jī)的啟動問題),此外,EKF算法可以確保系統(tǒng)的全局穩(wěn)定性(其他一些通過狀態(tài)觀測器實(shí)現(xiàn)電機(jī)無速度傳感器控制的方法,通常僅在標(biāo)稱狀態(tài)的軌跡上將電機(jī)非線性化,不能保證系統(tǒng)的全局穩(wěn)定性),而且整個系統(tǒng)易于數(shù)字化實(shí)現(xiàn)。但是擴(kuò)展卡爾曼算法復(fù)雜,需要矩陣求逆運(yùn)算,計算量大,為滿足實(shí)時控制的要求,需要高速,高精度的數(shù)字信號處理器。另一方面,擴(kuò)展卡爾曼濾波器要用到很多隨機(jī)誤差的統(tǒng)計參數(shù),由于模型復(fù)雜,涉及因素多,使得分析這些參數(shù)的工作比較困難,需要通過大量調(diào)試才能確定合適的隨機(jī)參數(shù),而且調(diào)速范圍有一定的局限性,只適合中高速調(diào)速系統(tǒng)。