
為有效應(yīng)對(duì)突發(fā)性、規(guī)模性的恐怖暴力事件,非致命性防暴武器的研制越來(lái)越受到各國(guó)的重視,研制以高機(jī)動(dòng)性的ATV作為武器平臺(tái)的防暴武器系統(tǒng)對(duì)提高反恐作戰(zhàn)能力具有重大意義,而現(xiàn)代化的控制系統(tǒng)又使得整個(gè)武器系統(tǒng)更加可控化,智能化。因此,這里提出一種基于DSP的ATV-ATT中控系統(tǒng)設(shè)計(jì)方案。該設(shè)計(jì)是以DSP TMS320F2812作為控制核心,通過(guò)手柄控制武器裝置的俯仰運(yùn)動(dòng)和回轉(zhuǎn)運(yùn)動(dòng),以及通過(guò)按鍵方式控制其徽動(dòng)、測(cè)距、自動(dòng)瞄準(zhǔn)和發(fā)射模式設(shè)定等前期準(zhǔn)備工作,當(dāng)操作人員按下射擊按鈕后,武器控制系統(tǒng)根據(jù)所設(shè)定條件自動(dòng)形成允許發(fā)射信號(hào),隨后武器就被發(fā)射或投放出去。同時(shí)系統(tǒng)帶有自檢及存彈檢測(cè)功能。
1 系統(tǒng)設(shè)計(jì)方案
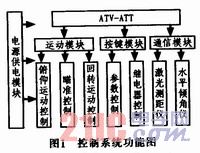
全地形反恐防暴武器系統(tǒng)ATV-ATT中控系統(tǒng)的功能主要是完成對(duì)武器系統(tǒng)運(yùn)動(dòng)、測(cè)距、瞄準(zhǔn)、發(fā)射等一系列控制,如圖1所示,該系統(tǒng)包括3大模塊:運(yùn)動(dòng)模塊、按鍵模塊和通信模塊。
1.1 運(yùn)動(dòng)控翻模塊
在控制系統(tǒng)中,通過(guò)手柄操縱桿控制發(fā)射裝置的俯仰運(yùn)動(dòng)和回轉(zhuǎn)運(yùn)動(dòng)。手柄可以等效成兩個(gè)獨(dú)立的電位器,模擬電壓的范圍在0~3 V,符合A/D轉(zhuǎn)換模塊的采集電壓范圍,經(jīng)過(guò)DSP(TMS320F2812)的A/D轉(zhuǎn)換和事件管理器(EV)的PWM波形生成,分別輸出兩路PWM波形控制步進(jìn)電機(jī)(90BYG3502)轉(zhuǎn)速,而方向則通過(guò)DSP強(qiáng)大的IO端口輸出高低電平信號(hào)來(lái)控制,此信號(hào)為高電平時(shí)電機(jī)為順時(shí)針旋轉(zhuǎn),低電平時(shí)則為反方向逆時(shí)針旋轉(zhuǎn)。但由于DSP的輸出信號(hào)的電壓幅值在0~3.3 V之間,不能滿(mǎn)足步進(jìn)電機(jī)驅(qū)動(dòng)器(MSa-3H090M)的信號(hào)幅值范圍,因此將這4路信號(hào)經(jīng)過(guò)升壓驅(qū)動(dòng)電路后傳送到電機(jī)驅(qū)動(dòng)器,進(jìn)而實(shí)現(xiàn)對(duì)電機(jī)的控制。
同時(shí)系統(tǒng)中還有瞄準(zhǔn)功能,激光測(cè)距儀與視頻成像儀的光軸共軸,當(dāng)視頻成像儀在屏幕中顯示的瞄準(zhǔn)點(diǎn)指向目標(biāo)時(shí),按下測(cè)距按鍵即可觸發(fā)激光測(cè)距儀測(cè)距信號(hào),DSP根據(jù)當(dāng)前狀態(tài)下水平傾角儀兩垂直軸與水平面的夾角,經(jīng)過(guò)特定的算法,計(jì)算出發(fā)射狀態(tài)下兩方向位移,DSP給出電機(jī)驅(qū)動(dòng)信號(hào)驅(qū)動(dòng)電機(jī),并實(shí)時(shí)比對(duì)傾角儀的讀數(shù),達(dá)到計(jì)算值允許的閾值范圍內(nèi),即認(rèn)為瞄準(zhǔn)完成可進(jìn)行發(fā)射。
DSP TMS320F2812是一種低功耗的32位定點(diǎn)數(shù)字信號(hào)處理器。除具有一般DSP的優(yōu)點(diǎn)外,它還采用高性能靜態(tài)CMOS技術(shù),電壓從5 V降為3.3 V,內(nèi)核電壓降為1.8 V,減少了功耗。指令執(zhí)行速度最高150 MHz,幾乎所有指令都可在6.67 ns的單周期內(nèi)完成。該芯片還具有大量外設(shè)資源,如A/D轉(zhuǎn)換、定時(shí)器、各種串口(同步和異步),看門(mén)狗、CAN總線/PWM發(fā)生器、數(shù)字IO腳等。因此選用DSP TMS320F2812作為系統(tǒng)控制器。
1.2 按鍵模塊
參數(shù)控制包括微動(dòng)按鍵的控制和2種發(fā)射模式按鍵控制,按下測(cè)距按鍵可以改變DSP中脈沖頻率,利用手柄對(duì)發(fā)射裝置進(jìn)行細(xì)微控制。發(fā)射模式按鍵控制DSP相應(yīng)參數(shù),使武器按照既定發(fā)射模式發(fā)射。發(fā)火機(jī)構(gòu)通過(guò)繼電器來(lái)控制,本設(shè)計(jì)中采用GTJ8-8A型固態(tài)繼電器,發(fā)射按鍵經(jīng)DSP的通用IO端口向繼電器提供控制信號(hào),48 V作為激發(fā)電壓進(jìn)行點(diǎn)火,從而實(shí)現(xiàn)發(fā)射過(guò)程。
1.3 通信模塊
TMS320F2812器件包含了串行通信接口SCI模塊。該SCI模塊帶有與RS-232標(biāo)準(zhǔn)一致的異步串口,使得TMS320F2812可以方便地與其他使用標(biāo)準(zhǔn)格式的異步外設(shè)進(jìn)行數(shù)據(jù)通信。在本設(shè)計(jì)中通信子系統(tǒng)就是通過(guò)標(biāo)準(zhǔn)RS-232串口完成DSP與水平傾角儀,激光測(cè)距儀和視頻成像儀之間的數(shù)據(jù)通信控制。
2 系統(tǒng)硬件設(shè)計(jì)
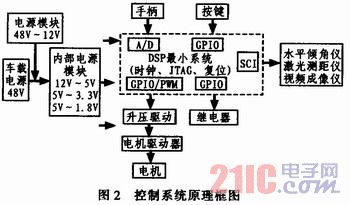
圖2為該系統(tǒng)設(shè)計(jì)的原理框圖,這里主要給出升壓驅(qū)動(dòng)電路和電源電路的設(shè)計(jì)。
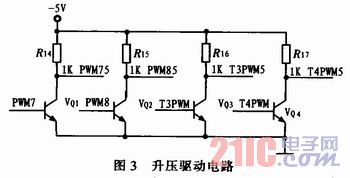
升壓驅(qū)動(dòng)電路采用三極管放大電路的基本原理:集電極電流受基極電流的控制,并且基極電流很小的變化,會(huì)引起集電極電流很大的變化,且變化滿(mǎn)足一定的比例關(guān)系。這里選用NPN型硅三極管,將從DSP輸出的3.3 V的兩路方向信號(hào)和兩路脈沖信號(hào)分別升壓至5 V,從而驅(qū)動(dòng)電機(jī)驅(qū)動(dòng)器,如圖3所示。
電源是整個(gè)系統(tǒng)的能源中心,系統(tǒng)電源電路的性能在很大程度上影響到DSP系統(tǒng)的穩(wěn)定性。直流電源的輸入為48V的車(chē)載電瓶,采用SPD75 -XXS12型寬電壓恒流穩(wěn)壓電源模塊,將48 V電壓轉(zhuǎn)為恒定的12 V直流電壓,進(jìn)而為中控板、水平傾角儀和激光測(cè)距儀等供電。
中控板12 V直流輸入,采用12S05轉(zhuǎn)換為+5 v直流電源。而內(nèi)部各器件的工作電源除+5 V外還有數(shù)字+3.3V、模擬+3.3V以及數(shù)字+1.8V。為此,專(zhuān)門(mén)設(shè)計(jì)了中控板內(nèi)部電源模塊,用以實(shí)現(xiàn)將+5 V的電壓轉(zhuǎn)換為各器件工作所需的幾種電壓。這里采用了兩片LMlll7將+5 V分別轉(zhuǎn)換為+3.3 V和+1.8 V的輸出電壓。為了避免數(shù)字電源對(duì)模擬電源的噪聲干擾,通過(guò)電感將二者隔離,如圖4所示。

3 系統(tǒng)軟件設(shè)計(jì)
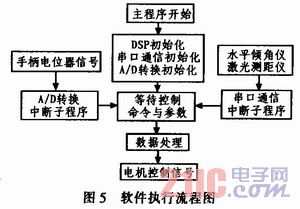
控制系統(tǒng)的軟件采用C語(yǔ)言編寫(xiě),軟件主要由主程序、串口中斷子程序和A/D轉(zhuǎn)換中斷子程序組成。主程序用于TMS320F2812型DSP的初始化、控制指令與參數(shù)的轉(zhuǎn)化與輸入,步進(jìn)電機(jī)驅(qū)動(dòng)信號(hào)的生成。串口中斷子程序用于實(shí)現(xiàn)接收來(lái)自水平傾角儀和激光測(cè)距儀的信息及向其發(fā)出控制指令。A/D轉(zhuǎn)換中斷子程序用于實(shí)現(xiàn)接收手柄電位器反饋來(lái)的電壓變化并將其轉(zhuǎn)化為數(shù)值。軟件執(zhí)行流程如圖5所示。
4 系統(tǒng)調(diào)試結(jié)果
將元器件焊接在電路板上,檢查無(wú)虛焊漏焊的焊點(diǎn),測(cè)量電源是否有焊接短路現(xiàn)象,確保板子的電源供電正常,各個(gè)模塊間的連線正確,如圖6所示。

圖7所示為燒寫(xiě)好程序的系統(tǒng)連接圖,經(jīng)過(guò)調(diào)試,程序運(yùn)行完好,武器系統(tǒng)可以實(shí)現(xiàn)90°回轉(zhuǎn)方向運(yùn)動(dòng),60°內(nèi)高低方向運(yùn)動(dòng)以及通過(guò)按鍵方式控制其微動(dòng)、激光測(cè)距、自動(dòng)瞄準(zhǔn)和發(fā)射模式設(shè)定,自檢及存彈檢測(cè)等一系列的功能要求。
5 結(jié)束語(yǔ)
本文對(duì)某ATV-ATT車(chē)載武器控制系統(tǒng)的設(shè)計(jì)方案進(jìn)行了闡述。按照系統(tǒng)功能不同,分別介紹各個(gè)模塊電路。根據(jù)硬件設(shè)計(jì)的基本原則,選擇了合適的器件和參考電路,然后對(duì)硬件電路進(jìn)行了分析和設(shè)計(jì),解決了升壓驅(qū)動(dòng),電源供電等難題,最后通過(guò)調(diào)試安裝,系統(tǒng)的實(shí)際運(yùn)行,驗(yàn)證了本設(shè)計(jì)運(yùn)行穩(wěn)定,達(dá)到了應(yīng)用目標(biāo)。