屈召貴,龔名茂
(四川工商學(xué)院 實驗中心,四川 成都 611745)
摘要:針對目前礦井鉆探所用的鉆孔軌跡測量方法存在技術(shù)指標(biāo)高、工序復(fù)雜等問題,研制了由加速度計ADXL206和陀螺儀ADXRS645構(gòu)成的存儲式測斜儀。以微控器為核心,采用抗干擾、誤差修正、溫度補償?shù)刃U胧7抡媾c測試結(jié)果表明,該系統(tǒng)具有測量精度高、穩(wěn)定性好、工作時間長等優(yōu)點。
關(guān)鍵詞:存儲式;測斜儀;加速度計;陀螺儀
0引言
在地質(zhì)災(zāi)害監(jiān)測過程中,經(jīng)常需要通過鉆孔分析地質(zhì)信息。鉆孔是否按照設(shè)計軌跡方向鉆進(jìn),需要通過實際測孔才能確定。礦井超前勘探以及精確的定向工程鉆探都需要高精度且能全方位測量鉆孔軌跡的設(shè)備。因此,測斜儀是定向鉆進(jìn)工程中必不可缺的一部分。目前國內(nèi)使用的高精度隨鉆測斜系統(tǒng)大多是從國外引進(jìn)的,價格昂貴,使用不方便,維修成本高。為此,本系統(tǒng)采用由基于MEMS芯片的加速度傳感器、陀螺儀、高溫存儲芯片和微控制器構(gòu)成的存儲式測斜系統(tǒng),提出軟硬件實現(xiàn)方法。
1存儲式測斜儀的組成及原理
1.1存儲式測斜儀的組成
存儲式測斜儀主要由參數(shù)測量、數(shù)據(jù)存儲、控制和供電管理四部分構(gòu)成,如圖1所示。要求其所有器件均能在環(huán)境溫度-25~125℃范圍內(nèi)可靠工作。

圖1測斜儀整體框圖系統(tǒng)要求測斜儀安裝在長30 cm、寬40 cm的探管中,能將方位角、傾角、工具面角、時間等數(shù)據(jù)進(jìn)行保存,測試完成后通過RS232通信將所測數(shù)據(jù)導(dǎo)出。要求在探管下放的過程中,數(shù)據(jù)測量模塊處于斷電狀態(tài),當(dāng)探管下放到指定高度時開始給測量模塊供電,使其將測量的井斜、方位等信息通過微控制器進(jìn)行存儲(每組36 B)。工作約1 min后繼續(xù)下放,在此過程中再次切斷測量模塊電源,以降低功耗和減少系統(tǒng)自身發(fā)熱。因此,除測量、存儲模塊外,還包括晃動檢測(檢測是否為下降過程)和繼電器控制主電源(控制測量模塊電源)模塊。
1.2存儲式測斜儀的基本原理
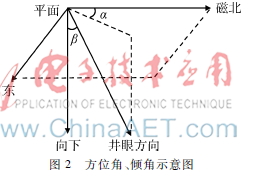
圖2方位角、傾角示意圖根據(jù)導(dǎo)航學(xué)旋轉(zhuǎn)變換中的歐拉定理,載體在空間中的姿態(tài)可用相對于地理坐標(biāo)系有限次的轉(zhuǎn)動來表示,每次轉(zhuǎn)動的角度即為航向角、俯仰角和橫滾角,即是鉆孔中的方位角、傾角和工具面角[13]。如圖2所示,α為方位角,β為傾角。
加速度計用于測量傾角,即物體相對水平面的夾角,有單軸、雙軸和三軸之分,本設(shè)計采用雙軸加速度,其傾角測試示意圖如3所示,X軸和Y軸相互正交,其傾角β的計算數(shù)學(xué)關(guān)系式如式(1)、式(2)所示。
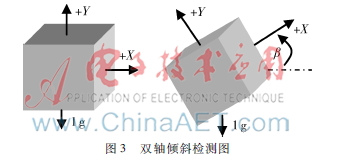
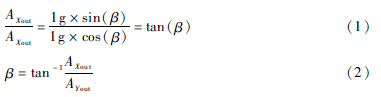
式中,AXout和AYout為X軸和Y軸的加速度。
陀螺儀是測量角速度的傳感器,測量方位角需要通過對角速度ω和時間t的乘積進(jìn)行積分轉(zhuǎn)換成轉(zhuǎn)動的角度α,如式(3)所示。
α=∫ωtdt(3)
由上述可知,只要通過傳感器測量出加速度計中的X、Y支路的輸出就可測量出傾角,只要測量出陀螺儀中的角速度就可測量出方位角,兩者結(jié)合即可換算成對應(yīng)方位的傾斜[45]。
2存儲式測斜儀的硬件設(shè)計
系統(tǒng)硬件部分的加速度計和陀螺儀采用基于MEMS的ADI公司的ADXL206和ADXRS645,工作溫度極限可達(dá)175℃;數(shù)據(jù)存儲選用在片512 KB的25LC512,微控制器選用PIC18F25K80,通信模塊選用ADM232,此芯片的工作溫度可達(dá)125℃,能滿足系統(tǒng)要求。硬件框圖如圖4所示。
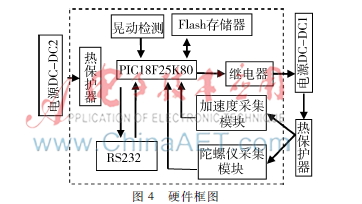
其中DCDC2經(jīng)過熱保護器(型號:KSD9700~110°)給晃動檢測及存儲模塊供電,下井后持續(xù)供電,熱保護器的作用在于當(dāng)工作溫度達(dá)到110℃之后切斷DCDC2的供電,從而起到保護作用。微控制器選用了PIC18F25K80,工作溫度為-40℃~125℃,其內(nèi)置的12位ADC足以將加速度計、陀螺儀和晃動檢測單元的模擬信號轉(zhuǎn)化為精度足夠的數(shù)字信號,而內(nèi)置的定時器可以作為同步時間的基準(zhǔn)信號,通過RS232給定時器寫入當(dāng)前時間來實現(xiàn)實時時鐘的功能。測量的傾角、方位角、工具面角和時間等信息存儲在外擴的Flash存儲器中,在返回地面后,能通過RS232接口將存儲的數(shù)據(jù)傳輸給上位機。
存儲器選用MicroChip公司的SPI接口EEPROM存儲器25LC512,該存儲器溫度范圍達(dá)-40℃~+150℃,容量為512 KB,按照測量模塊每組數(shù)據(jù)36 B計算,一共可存儲1 820組數(shù)據(jù)。
3存儲式測斜儀的軟件設(shè)計
軟件設(shè)計主要包括位置信息解算程序、數(shù)據(jù)存儲程序、電源管理程序和通信程序。
位置信息解算主要是通過測量加速度傳感器的輸出和陀螺儀的輸出模擬信號通過A/D轉(zhuǎn)換后,經(jīng)過計算而得。加速度傳感器ADXL206提供X和Y軸的加速度對應(yīng)的模擬電壓VX和VY,0 g對應(yīng)VS/2,VS取5 V,由數(shù)據(jù)手冊可知對應(yīng)的X、Y軸的加速度分別為AX和AY,如式(4)、(5)所示。代入式(1)可求出傾角。
AX=(VX-2.5)×3.2/mV/g(4)
AY=(VY-2.5)×3.2/mV/g(5)
設(shè)計傾角測量精度為0.1°,測量范圍為-80°~+80°,則A/D采樣的分辨率為3.2 mg/LSB,如式(6)所示。±1 g對應(yīng)的加速度計輸出電壓為2.3 V~2.7 V,A/D選擇的輸入電壓范圍為±320 mV。
Δg=1g×(sin80-sin(80-0.1))=3.2 mg(6)
陀螺儀ADXRS645提供角速度ω對應(yīng)的模擬電壓值輸出Vout,0°/s對應(yīng)2.5 V,通過測量其模擬電壓值可以轉(zhuǎn)化為角速度,轉(zhuǎn)換方法如式(7)所示。角速度ω轉(zhuǎn)換為角度α的方法如式(3),具體軟件實現(xiàn)方法是對角速度ω乘以程序運行一次所需的時間Δt,如此循環(huán),然后對每次乘積進(jìn)行累加,結(jié)果即為轉(zhuǎn)過的角度α[68]。由此可完成±180°的方位角測量。
ω=(Vout-2.5)/1mV/°/s(7)
數(shù)據(jù)存儲主要是對所測得的傾角、方位角、時間等信息進(jìn)行存儲,每次需完成36 B的數(shù)據(jù)存儲。軟件中采用由結(jié)構(gòu)體和一維組構(gòu)成的線性表進(jìn)行數(shù)據(jù)存儲。
typedef struct FRAM_adddata
{uint32_t add;//地址
uint32_t dat;//數(shù)據(jù)
}FRAM_ADDDATA;
FRAM_ADDDATA * Fram_Tabl[36];
4實驗測試與結(jié)果分析
系統(tǒng)軟硬件設(shè)計好后,對系統(tǒng)進(jìn)行了測試。首先測試加速度計誤差,加速度計傾角為0°時,用毫伏表測得VX=2.498 V,VY=2.500 3 V,X軸存在約50 mg、Y軸存在1 g的失調(diào)誤差,采用兩點法測失調(diào)和放大器增益,進(jìn)行校準(zhǔn)。下面以X軸為例說明校準(zhǔn)方法,在X軸取兩點,置于+1 g和-1 g的場中,測得輸出如式(8)和(9)所示,其中AOFF為失調(diào)[910]。
A+1g=AOFF+(1g×Gain)(8)
A-1g=AOFF-(1g×Gain)(9)
由(8)、(9)兩式可確定失調(diào)AOFF和增益Gain,如式(10)、(11)所示。

將測量結(jié)果減去失調(diào),然后將所得結(jié)果除以增益,即為實際值,如式(12)所示。調(diào)整了軟件算法,最后測得在0°時VX=2.500 01 V,VY=2.500 02 V。

同理,可校正陀螺儀的失調(diào)引起的誤差和靈敏度失配引起的誤差。
將儀器置于80℃的杜瓦瓶中進(jìn)行測試,根據(jù)需求持續(xù)工作8 h,分別設(shè)置方位為60°、80°、150°;傾角10°、30°、60°等進(jìn)行測試,將所測數(shù)據(jù)通過串口依次讀出,其數(shù)據(jù)如表1所示。
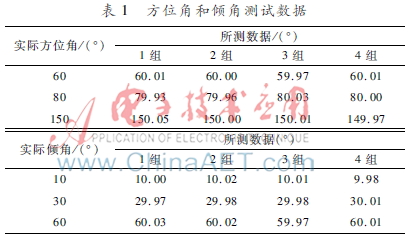
由表1中數(shù)據(jù)可知,方位角和傾角的相對誤差均小于等于0.3%,有較高的精度。
同時,對數(shù)據(jù)存儲的穩(wěn)定性進(jìn)行了測試,將環(huán)境溫度提高到110℃,持續(xù)工作,依次間隔5 min讀取一次,數(shù)據(jù)連續(xù),無出錯數(shù)據(jù)。
5結(jié)論
本文設(shè)計的由基于MEMS器件的加速度傳感器、陀螺儀、高速存儲器和微控制器構(gòu)成的存儲式測斜儀,能工作在-25℃~+125℃的環(huán)境中,軟件上使用濾波算法對兩個傳感器的數(shù)據(jù)進(jìn)行濾波融合,解決失調(diào)等引起的誤差,同時也解決了加速度計測量動態(tài)角度不準(zhǔn)確等問題。所設(shè)計的測斜儀具有精度高、適應(yīng)環(huán)境溫度高、體積小、功耗低等優(yōu)點。
參考文獻(xiàn)
[1] 詹世玉. 隨鉆測量系統(tǒng)設(shè)計[J]. 自動化與儀器儀表,2011(2):134135,138.
[2] 于小波,楊超. 隨鉆井斜監(jiān)測預(yù)警系統(tǒng)研究[J]. 石油機械,2011,39(3):4749.
[3] 張杰. 基于MEMS陀螺儀和加速度計的動態(tài)傾角傳感器[J]. 機械設(shè)計與制造,2012(9):141143.
[4] 李成文,楊軍祥,王純委,等.新一代直升機綜合核心處理機技術(shù)研究與實現(xiàn)[J].電子技術(shù)應(yīng)用,2014,40(12):121124.
[5] 應(yīng)科煒,吳文貢,湯達(dá)斌,等. ADXRS角速度檢測陀螺儀原理及應(yīng)用[J]. 傳感器世界,2006,12(1):4244,41.
[6] 曾勇,楊濤,岳高銘. 基于MEMS微加速度計的振動測試儀[J]. 傳感器與微系統(tǒng),2007,26(6):7576,89.
[7] 張玉波,畢洪波,魏春明,等. 高精度隨鉆測斜儀的設(shè)計[J]. 電子技術(shù)應(yīng)用,2007,33(10):7880.
[8] 袁磊. 電子式隨鉆測斜儀器的研制及應(yīng)用[J]. 石油機械,2013,41(7):7881.
[9] 雷曉榮,程建遠(yuǎn). YZG05/30礦用鉆孔軌跡記錄儀及其應(yīng)用[J]. 煤田地質(zhì)與勘探,2015,43(4):120122.
[10] 溫鋒,李錦明.基于FPGA的激光陀螺信號高速解調(diào)濾波設(shè)計[J].電子技術(shù)應(yīng)用,2014,40(1):9092,96.
