賈永興,朱瑩,楊宇
(解放軍理工大學(xué) 通信工程學(xué)院,江蘇 南京 210007)
摘要:設(shè)計(jì)并實(shí)現(xiàn)了一套功能高度集成的無(wú)線遙控機(jī)器人平臺(tái),由履帶排爆機(jī)器人和手持控制終端組成。機(jī)器人自身搭載的傳感器可以對(duì)環(huán)境狀態(tài)進(jìn)行偵測(cè),并發(fā)送給手持終端。手持終端則遠(yuǎn)程控制機(jī)器人的動(dòng)作,實(shí)現(xiàn)危險(xiǎn)爆炸物的排除和危險(xiǎn)有害環(huán)境的監(jiān)測(cè),防止人員遭受傷害。該平臺(tái)實(shí)現(xiàn)方案具有成本低、體積小、功耗低、可移植性和擴(kuò)展性強(qiáng)等特點(diǎn)。
關(guān)鍵詞:履帶式機(jī)器人;手持終端;遠(yuǎn)程控制;危險(xiǎn)環(huán)境
0引言
近年來(lái),各種恐怖活動(dòng)日益猖獗,為了維護(hù)社會(huì)穩(wěn)定,研究開(kāi)發(fā)反恐防爆技術(shù)和裝備的需求越來(lái)越大。在軍事上,危險(xiǎn)環(huán)境時(shí)刻存在,如何保證人員的安全,有效地保證戰(zhàn)斗力,也是亟需解決的問(wèn)題。隨著智能控制技術(shù)和傳感器技術(shù)[1]的不斷更新發(fā)展,用機(jī)器來(lái)代替人在危險(xiǎn)環(huán)境下工作成為研究熱點(diǎn)[23],得到國(guó)內(nèi)外的廣泛重視。本文設(shè)計(jì)和制作完成了一款履帶式機(jī)器人和與之配套的手持控制終端,手持終端根據(jù)機(jī)器人回傳的視頻和傳感器信息,通過(guò)遠(yuǎn)程控制,驅(qū)動(dòng)機(jī)器人完成環(huán)境信息的偵測(cè)和危險(xiǎn)爆炸物排除。
1系統(tǒng)框架
系統(tǒng)包括履帶排爆機(jī)器人和手持控制終端兩大部分,總體設(shè)計(jì)框圖如圖1所示。履帶機(jī)器人由視頻采集傳輸模塊、機(jī)械模塊、環(huán)境信息感知模塊、無(wú)線通信模塊以及控制模塊構(gòu)成。首先控制模塊通過(guò)無(wú)線通信模塊獲取手持設(shè)備發(fā)送的控制命令,當(dāng)命令是讀取命令時(shí),通過(guò)傳感器讀取各類(lèi)環(huán)境參數(shù)信息,然后通過(guò)無(wú)線通信模塊將各類(lèi)環(huán)境參數(shù)信息發(fā)給控制終端顯示。當(dāng)控制命令是動(dòng)作命令時(shí),則根據(jù)接收的參數(shù)控制機(jī)器人運(yùn)動(dòng)或機(jī)械臂抓取爆炸物。考慮到帶寬原因和控制方面的需求,圖像傳輸模塊與行動(dòng)控制使用不同的無(wú)線信道。視頻采集傳輸模塊采集到圖像后直接交給無(wú)線路由器,傳送給手持設(shè)備,其過(guò)程不受主處理器控制。
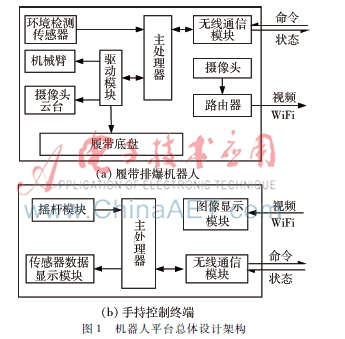
手控控制終端由控制模塊、搖桿數(shù)據(jù)采集模塊、顯示模塊及無(wú)線通信模塊構(gòu)成。手控終端首先檢查是否有搖桿狀態(tài)改變,若有就將相應(yīng)控制信息進(jìn)行編碼,并交由無(wú)線通信模塊發(fā)送給機(jī)器人執(zhí)行。同時(shí)終端還會(huì)按照固定頻率向機(jī)器人發(fā)送環(huán)境信息讀取命令,并顯示回傳的視頻信息和傳感器信息。
2硬件設(shè)計(jì)
2.1手持控制終端
手持終端主控核心芯片為STM32F103zet6,它基于CortexM3架構(gòu),主頻為72 MHz,有豐富的外設(shè)資源[4]。設(shè)計(jì)中主要使用了其A/D接口、GPIO接口、串口、SPI接口。其中A/D接口和GPIO接口與搖桿模塊相連,采集搖桿狀態(tài)信息;串口與無(wú)線模塊相連,發(fā)送命令給無(wú)線模塊,并讀取無(wú)線模塊接收的傳感器數(shù)據(jù);SPI接口與液晶模塊相連,以顯示傳感器數(shù)據(jù)。
搖桿模塊主要完成對(duì)機(jī)器人機(jī)械動(dòng)作的控制,包括前進(jìn)、后退等底盤(pán)運(yùn)動(dòng)和機(jī)器臂、云臺(tái)等舵機(jī)運(yùn)動(dòng)。搖桿模塊具有兩路模擬輸出。一路按鈕數(shù)字輸出。當(dāng)搖桿上下左右搖動(dòng)時(shí),兩路模擬信號(hào)可以輸出不同的電壓值,主控板根據(jù)通過(guò)采集電壓值判讀搖桿的運(yùn)動(dòng)情況,以控制機(jī)器人動(dòng)作。一路數(shù)字輸出主要用來(lái)判斷搖桿是否按下(類(lèi)似按鍵)。實(shí)現(xiàn)中采用了四個(gè)搖桿模塊,以控制機(jī)器人底盤(pán)、機(jī)械臂和攝像頭云臺(tái)的動(dòng)作。搖桿的模擬輸出與主控板CPU的A/D接口相連,數(shù)字輸出和CPU的GPIO口相連,以采集搖桿狀態(tài)信息。
無(wú)線通信模塊主要完成手持終端和機(jī)器人之間的數(shù)據(jù)傳輸,包括手持設(shè)備控制命令的發(fā)送和接收機(jī)器人返回的傳感器信息。實(shí)現(xiàn)中采用HC11 無(wú)線串口模塊,通信頻率為433 MHz。硬件上與主控板CPU的串口相連,工作于半雙工的模式,比特率為9 600 b/s,頻道為001。
為了遠(yuǎn)程監(jiān)測(cè)機(jī)器人所處的環(huán)境信息,實(shí)現(xiàn)中設(shè)計(jì)了兩個(gè)顯示模塊。一個(gè)用來(lái)實(shí)時(shí)顯示機(jī)器人采集回傳的圖像信息,以便觀察環(huán)境和危險(xiǎn)物的位置,控制機(jī)器人的動(dòng)作。另一個(gè)用來(lái)顯示接收到的傳感器信息,以觀察機(jī)器人所處環(huán)境信息。實(shí)現(xiàn)中圖像顯示采用了安裝有火狐瀏覽器的手機(jī),也可以采用平板電腦或PC,接收和顯示W(wǎng)iFi傳輸過(guò)來(lái)的圖像。傳感器狀態(tài)信息的顯示采用了一個(gè)TFT液晶屏,它與CPU的SPI接口相連,顯示傳感器數(shù)據(jù)。
2.2履帶機(jī)器人
機(jī)器人上的主控板同樣采用基于STM32F103的控制板。通過(guò)串口讀取來(lái)自無(wú)線手持設(shè)備的數(shù)據(jù),并進(jìn)行解析,以判斷是機(jī)械操作命令還是讀取傳感器命令。如果是機(jī)械操作命令,則將給驅(qū)動(dòng)模塊發(fā)送相應(yīng)的命令,驅(qū)動(dòng)機(jī)器人動(dòng)作。如果是讀取傳感器命令,則采集傳感器數(shù)據(jù),并交付給無(wú)線發(fā)送模塊,發(fā)送給手持設(shè)備。
機(jī)械部分由機(jī)器人底盤(pán)、機(jī)械臂、攝像頭云臺(tái)等部分構(gòu)成[5]。機(jī)器人底盤(pán)由兩個(gè)直流電機(jī)驅(qū)動(dòng),機(jī)械臂設(shè)計(jì)采用了五自由度結(jié)構(gòu),由五個(gè)舵機(jī)和連接件構(gòu)成,并在機(jī)械臂的前端設(shè)計(jì)了一個(gè)抓手,完成升降、抓取、釋放等動(dòng)作,攝像頭云臺(tái)采用三個(gè)舵機(jī),用于調(diào)整攝像頭的位置。機(jī)械驅(qū)動(dòng)模塊由STC11F32XE單片機(jī)與外圍驅(qū)動(dòng)電路構(gòu)成,接收主控板串口發(fā)送的命令,以產(chǎn)生不同占空比的PWM波,或改變I/O口的輸出方向,驅(qū)動(dòng)底盤(pán)完成機(jī)器人前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)動(dòng)作,控制舵機(jī)改變轉(zhuǎn)角配合機(jī)械臂和云臺(tái)動(dòng)作。
視頻采集和傳輸模塊主要采集機(jī)器人附近的圖像信息[6],并回傳給手持設(shè)備。視頻采集使用了羅技USB攝像頭,將采集到的圖像數(shù)據(jù)交給無(wú)線WiFi路由器,由路由器發(fā)送出去。無(wú)線路由器采用了TPLINK的150M無(wú)線路由器TLTLWR703N,工作于無(wú)線AP模式。通過(guò)更新組件,將簡(jiǎn)單的無(wú)線路由器刷成openwrt,并通過(guò)網(wǎng)絡(luò)配置和安裝相應(yīng)的模塊,使得USB攝像頭數(shù)據(jù)可以直接通過(guò)WiFi發(fā)送。
無(wú)線通信模塊主要接收手持設(shè)備傳來(lái)的控制命令,交付給機(jī)器人主控板,同時(shí)接收主控板交付的傳感器信息,發(fā)送給手持終端。采用與手持設(shè)備同類(lèi)型模塊,與主控板的串口相連,工作于半雙工的模式。
為了感知機(jī)器人所處的環(huán)境狀態(tài),機(jī)器人上安裝了多種傳感器,包括數(shù)字式三軸陀螺儀、溫濕度傳感器、一氧化碳、有害煙塵濃度、甲烷濃度傳感器。數(shù)字陀螺儀用于檢測(cè)機(jī)器人行進(jìn)時(shí)自身的平衡狀態(tài),采用了高精度陀螺加速度計(jì)MPU6050模塊,與主控板CPU通過(guò)串口進(jìn)行通信,波特率為115 200 b/s。該模塊內(nèi)部集成了姿態(tài)解算器,配合動(dòng)態(tài)卡爾曼濾波算法,能夠在動(dòng)態(tài)環(huán)境下準(zhǔn)確輸出模塊的當(dāng)前姿態(tài)。通過(guò)該模塊發(fā)送至上位機(jī)的角度包,以了解機(jī)器人當(dāng)前姿態(tài)。溫濕度傳感器數(shù)據(jù)輸出與主控板CPU的GPIO口相連,采用單總線串行數(shù)據(jù)格式,一次通信傳輸5個(gè)字節(jié)數(shù)據(jù),包括2字節(jié)溫度數(shù)據(jù),2字節(jié)濕度數(shù)據(jù),1字節(jié)校驗(yàn)和。有害煙塵、甲烷、一氧化碳傳感器主要基于氣敏元件對(duì)不同類(lèi)型、不同濃度的氣體有不同的電阻值,并以電壓的方式輸出,檢測(cè)物濃度越高輸出值越高。實(shí)現(xiàn)中將這些傳感器與主控板CPU的A/D接口,通過(guò)采樣電壓值,來(lái)獲得相應(yīng)的氣體濃度。
3軟件設(shè)計(jì)
軟件代碼完成系統(tǒng)各部份的控制和通信,在Keil集成環(huán)境下采用C語(yǔ)言編寫(xiě),并通過(guò)編譯、鏈接后,生成目標(biāo)代碼,通過(guò)下載器下載到STM32F103上運(yùn)行。
為保證機(jī)器人和控制終端之間數(shù)據(jù)通信的有序性,采用主從機(jī)的工作方式,當(dāng)機(jī)器人開(kāi)機(jī)以后始終處于等待狀態(tài),等待手持控制終端發(fā)來(lái)指令。
3.1手持控制終端軟件設(shè)計(jì)
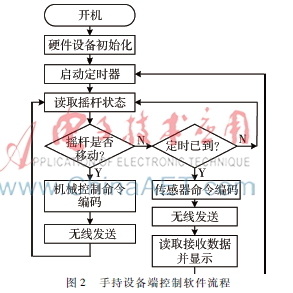
手控終端軟件工作具體流程如圖2所示。通過(guò)循環(huán)讀取A/D通道的轉(zhuǎn)換值,以確定控制搖桿是否有移動(dòng)。如果有移動(dòng),就將各個(gè)通道數(shù)據(jù)編碼為統(tǒng)一的控制數(shù)據(jù)格式,發(fā)送給機(jī)器人執(zhí)行。如果沒(méi)有,則確認(rèn)定時(shí)器是否到時(shí),如圖2手持設(shè)備端控制軟件流程
果時(shí)間到,則向機(jī)器人發(fā)送傳感器數(shù)據(jù)讀取指令。收到應(yīng)答數(shù)據(jù)包后,對(duì)數(shù)據(jù)包進(jìn)行校驗(yàn),如確認(rèn)接收正確,則對(duì)數(shù)據(jù)包分析,并將攜帶的傳感器信息顯示在液晶屏上。
3.2履帶機(jī)器人端軟件設(shè)計(jì)
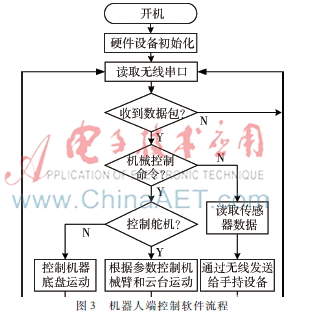
機(jī)器人軟件設(shè)計(jì)流程如圖3所示。通過(guò)讀取串口判斷是否收到手控終端的命令包。如果收到數(shù)據(jù)包,則解析命令是機(jī)械操作命令還是讀取傳感器命令。為了準(zhǔn)確地定位到每個(gè)機(jī)械電機(jī)和舵機(jī),與手控終端搖桿狀態(tài)對(duì)應(yīng),實(shí)現(xiàn)中對(duì)每個(gè)電機(jī)和舵機(jī)進(jìn)行了編號(hào),并作為命令參數(shù)由手控終端發(fā)送。如果是讀取傳感器命令,則將傳感器信息編碼打包,通過(guò)無(wú)線通信模塊發(fā)送給手控終端進(jìn)行顯示。
4系統(tǒng)功能實(shí)現(xiàn)
首先打開(kāi)機(jī)器人電源,等待機(jī)器人各個(gè)部分完成初始化。此時(shí)打開(kāi)手機(jī)(或PAD)會(huì)出現(xiàn)一個(gè)名為wifirobotlivking的WiFi熱點(diǎn),再打開(kāi)火狐瀏覽器,輸入預(yù)先設(shè)置的網(wǎng)址,可在瀏覽器中實(shí)時(shí)顯示機(jī)器人采集回傳的視頻。接著打開(kāi)機(jī)器人控制終端,液晶屏上會(huì)顯示機(jī)器人所采集到的傳感器信息,包括機(jī)器人當(dāng)前橫向及側(cè)向傾角、機(jī)器人所處環(huán)境的溫濕度值、有害煙塵濃度值等。根據(jù)回傳的實(shí)時(shí)視頻,操作者移動(dòng)手持終端上的搖桿,可以通過(guò)無(wú)線方式遠(yuǎn)距離遙控機(jī)器人前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)等運(yùn)動(dòng),同時(shí)控制機(jī)械臂抓取和釋放物體,以及調(diào)整機(jī)器人安裝的攝像頭云臺(tái)轉(zhuǎn)角及俯仰角度確保最佳觀測(cè)位置。
5結(jié)論
本文設(shè)計(jì)并實(shí)現(xiàn)了一套功能高度集成的無(wú)線遙控機(jī)器人平臺(tái),實(shí)現(xiàn)對(duì)機(jī)器人的遠(yuǎn)程操控。通過(guò)機(jī)器人自身搭載的傳感器可以對(duì)目標(biāo)環(huán)境參數(shù)進(jìn)行監(jiān)測(cè),可進(jìn)行危險(xiǎn)爆炸物的排除和對(duì)危險(xiǎn)有害環(huán)境的監(jiān)測(cè)。該方案具有成本低、體積小、功耗低、可移植性和擴(kuò)展性強(qiáng)等特點(diǎn)。下一步可以完善平臺(tái)控制軟件,增加地址識(shí)別功能,實(shí)現(xiàn)控制多臺(tái)機(jī)器人的協(xié)同工作,同時(shí)加入GPS導(dǎo)航功能,使機(jī)器人能夠記住自己的位置與行進(jìn)路線,有一定的自主性,即使與手控端丟失聯(lián)系,也能夠自主返回。
參考文獻(xiàn)
[1] 秦志強(qiáng).先進(jìn)機(jī)器人傳感器技術(shù)[M]. 北京:電子工業(yè)出版社,2010.
[2] 莫海軍,吳少煒.排爆機(jī)器人及相關(guān)技術(shù)[J].機(jī)器人技術(shù)與應(yīng)用, 2005(4):31 36.
[3] 范路橋,姚錫凡,祁亨年.排爆機(jī)器人的研究現(xiàn)狀及其關(guān)鍵技術(shù)[J].機(jī)床與液壓, 2008,36(6):139 143.
[4] 彭剛,秦志強(qiáng).基于ARM CortexM3的STM32系列嵌入式微控制器應(yīng)用實(shí)踐[M]. 北京:電子工業(yè)出版社,2011.
[5] 李健,許旻,楊杰.排爆機(jī)器人手臂的研制及運(yùn)動(dòng)學(xué)分析[J].機(jī)械與電子,2009,27(3):66 69.
[6] 范路橋,姚錫凡,蔣梁中,等.排爆機(jī)器人視頻圖像系統(tǒng)的研究與實(shí)現(xiàn)[J].科學(xué)技術(shù)與工程 ,2007,7(19):4904 4908.
