鄒曉康,張浩然
(浙江師范大學(xué) 數(shù)理與信息工程學(xué)院,浙江 金華321004)
摘要:設(shè)計(jì)了基于STM32處理器的有位置傳感器的直流無刷電機(jī)控制器,采用電子換相取代傳統(tǒng)有刷電機(jī)的電刷換相,彌補(bǔ)了傳統(tǒng)有刷電機(jī)壽命短、發(fā)熱嚴(yán)重問題。直流電機(jī)轉(zhuǎn)子位置信息通過霍爾傳感器檢測(cè),根據(jù)電機(jī)換相原理,控制器輸出PWM波到智能逆變器IPM驅(qū)動(dòng)電機(jī)運(yùn)行。移植網(wǎng)絡(luò)協(xié)議LWIP對(duì)工業(yè)現(xiàn)場(chǎng)電機(jī)進(jìn)行統(tǒng)一管理。
關(guān)鍵詞:STM32;控制器;直流無刷電機(jī);IPM;LWIP
0引言
隨著現(xiàn)代機(jī)械工業(yè)的發(fā)展,傳統(tǒng)的有刷電機(jī)廣泛應(yīng)用于工業(yè)控制的各個(gè)方面,但由于其本身構(gòu)造存在換相電刷導(dǎo)致運(yùn)行時(shí)換相抖動(dòng)大、電機(jī)線圈發(fā)熱嚴(yán)重的問題,長(zhǎng)時(shí)間運(yùn)行電刷本身磨損導(dǎo)致使不能正常使用[1]。新興的直流無刷電機(jī)在電機(jī)控制器驅(qū)動(dòng)下,采用電子器件換相,從而避免了這些問題,延長(zhǎng)了電機(jī)壽命,提供大扭矩輸出,提高電機(jī)運(yùn)行穩(wěn)定性和可靠性[2],并且在控制器上嵌入以太網(wǎng)口,實(shí)現(xiàn)工業(yè)現(xiàn)場(chǎng)所有電機(jī)統(tǒng)一管控。
1系統(tǒng)設(shè)計(jì)原理
根據(jù)市場(chǎng)應(yīng)用廣泛的有刷電機(jī)存在電刷磨損以及電流換相噪聲大的缺陷,設(shè)計(jì)一種基于ARM的無位置傳感器的直流無刷電機(jī)(BLDC)控制器以電子換向取代了機(jī)械換相器。基于STM32的有感直流無刷電機(jī)控制器,根據(jù)電機(jī)內(nèi)嵌的三個(gè)霍爾傳感器的輸出電平判斷轉(zhuǎn)子位子信息,STM32處理器高速運(yùn)行換相程序,依據(jù)轉(zhuǎn)子位子來導(dǎo)通或關(guān)斷逆變驅(qū)動(dòng)模塊,實(shí)現(xiàn)電機(jī)線圈的通斷電,進(jìn)而實(shí)現(xiàn)換相[3]。通過STM32自帶的高速AD模塊,采樣電機(jī)線圈中心電壓實(shí)現(xiàn)有電機(jī)線圈過流保護(hù),采樣電池電壓實(shí)現(xiàn)電池檢測(cè),采樣電位器電壓設(shè)定速度輸入。通過線圈電流參數(shù)和轉(zhuǎn)子轉(zhuǎn)速參數(shù),實(shí)現(xiàn)電機(jī)的雙閉環(huán)控制。由于采用高速集成處理器和智能驅(qū)動(dòng)模塊,集成的內(nèi)部資源豐富,既簡(jiǎn)化了電路的復(fù)雜程度,也提到了電路的穩(wěn)定性。
2系統(tǒng)硬件設(shè)計(jì)
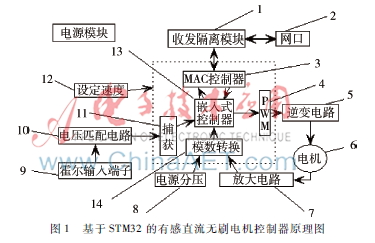
基于STM32的有感直流無刷電機(jī)控制器的原理圖如圖1所示。其中控制器采用STM32F407,收發(fā)隔離模塊1采用金升陽的DP83848,主要實(shí)現(xiàn)能量檢測(cè)和隔離高電壓功能,通過標(biāo)準(zhǔn)以太網(wǎng)接口連接于控制器內(nèi)嵌的MAC控制器3,實(shí)現(xiàn)以太網(wǎng)通信。霍爾輸入端子9為電機(jī)霍爾傳感器輸入接口,連接于電壓匹配電路10,使霍爾輸入電平匹配控制器電平,電平匹配后輸入到控制器輸入捕獲端口。控制器捕獲霍爾傳感器的位置信息并且得到電機(jī)轉(zhuǎn)速,高速運(yùn)行換相程序,輸出PWM4驅(qū)動(dòng)逆變電路5的功率管通斷實(shí)現(xiàn)電機(jī)6換相。設(shè)定速度12即電位器電平,實(shí)現(xiàn)外部對(duì)目標(biāo)轉(zhuǎn)速的設(shè)定,連接于模數(shù)轉(zhuǎn)換模塊14。電源分壓電路8對(duì)電源分壓后輸入到模數(shù)轉(zhuǎn)換14,實(shí)現(xiàn)電源電壓的監(jiān)測(cè)。電機(jī)6中線電壓連接于放大電路7,實(shí)現(xiàn)對(duì)電機(jī)的過流保護(hù)。嵌入式控制器13高速運(yùn)行換相程序、以太網(wǎng)協(xié)議、速度電流雙閉環(huán)PID控制程序,分別實(shí)現(xiàn)電機(jī)換相正常運(yùn)行、網(wǎng)絡(luò)通信的統(tǒng)一管理以及電機(jī)轉(zhuǎn)速控制。
基于STM32的有感直流無刷電機(jī)控制器最主要的硬件電路為逆變驅(qū)動(dòng)電路,傳統(tǒng)的驅(qū)動(dòng)電路一般采用驅(qū)動(dòng)芯片和IGBT管結(jié)合的驅(qū)動(dòng)橋電路,而本設(shè)計(jì)采用智能驅(qū)動(dòng)模塊FSBB30CH60F,可耐600 V高壓和30 A大電流,內(nèi)部集成智能驅(qū)動(dòng)芯片和功率管,集成度高,大大簡(jiǎn)化了驅(qū)動(dòng)電路的復(fù)雜性,提高了驅(qū)動(dòng)電路的可靠性和安全性。驅(qū)動(dòng)電路如圖2所示。
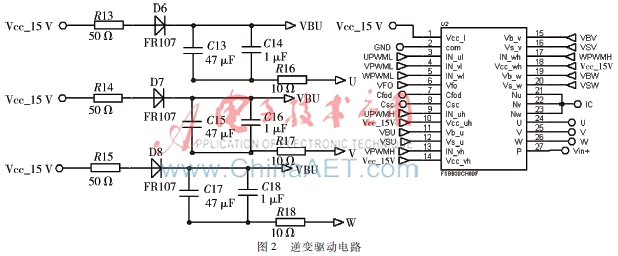
智能驅(qū)動(dòng)模塊內(nèi)部集成了4個(gè)驅(qū)動(dòng)芯片和6個(gè)功率管,其中3個(gè)驅(qū)動(dòng)芯片分別驅(qū)動(dòng)3個(gè)上半橋功率管,1個(gè)驅(qū)動(dòng)芯片驅(qū)動(dòng)3個(gè)下半橋功率管。三相電機(jī)輸入驅(qū)動(dòng)線為U、V、W,UPWMH、VPWMH、WPWMH為U、V、W三相上半橋功率管驅(qū)動(dòng)信號(hào);UPWML、VPWML、WPWML為U、V、W三相下半橋功率驅(qū)動(dòng)信號(hào),連接于控制器;4個(gè)驅(qū)動(dòng)芯片采用外部接15 V電壓自舉即電路圖中的VBU、VBV、VBW,VSU、VSV、VSW為自舉電壓的地,Vcc_15 V是各個(gè)驅(qū)動(dòng)芯片的工作電壓,Vin+為電機(jī)的驅(qū)動(dòng)電壓,連接于驅(qū)動(dòng)橋上的橋臂功率管上。IC為三相電流,輸入到運(yùn)放電路中放大,放大輸出至控制器模數(shù)采樣。
設(shè)計(jì)中鏈路層采用主控芯片STM32F407內(nèi)部自帶的媒體訪問控制器MAC實(shí)現(xiàn), MAC與物理層芯片通過RMII或MII接口通信,物理層采用DP83848實(shí)現(xiàn),該芯片有如下特點(diǎn):快速以太網(wǎng)控制器,符合IEEE 802.3標(biāo)準(zhǔn)的;集成極性檢測(cè)和校正10/100Base-T端口自匹配物理層PHY;支持暫停控制幀,包括自動(dòng)發(fā)送和接收流控制;可編程填充數(shù)據(jù)和CRC校驗(yàn)生成;支持半雙工和全雙工數(shù)據(jù)收發(fā)的工作模式;內(nèi)部集成高性能的DMA,24 KB的數(shù)據(jù)包緩沖SRAM用于發(fā)送和接收。DP83848接口如圖3所示。

為了有效地保護(hù)DP83848芯片和系統(tǒng)的安全,在輸出端,通過變壓器隔離方式對(duì)以太網(wǎng)模塊HR911105A進(jìn)行隔離保護(hù),輸入、輸出差分線通過50 nF電容進(jìn)行濾波處理,屏蔽高頻信號(hào)的干擾,震蕩電路采用集成的50 MHz有源晶振,保證輸出的時(shí)鐘信號(hào)飽滿、圓滑、穩(wěn)定。網(wǎng)絡(luò)隔離模塊如圖4所示。

軟件設(shè)計(jì)包括換相程序、控制算法、TCP/IP通信協(xié)議。換相程序是電機(jī)正常運(yùn)轉(zhuǎn)的保障。控制算法主要實(shí)現(xiàn)電機(jī)變速的調(diào)控、電機(jī)的啟動(dòng),以及當(dāng)外界設(shè)定速度與實(shí)時(shí)速度有差距時(shí)調(diào)節(jié)PWM輸出占空比。TCP/IP協(xié)議主要圖5程序框圖是實(shí)現(xiàn)通信,將電機(jī)線圈電流、轉(zhuǎn)速等信息通過以太網(wǎng)發(fā)送出去。程序框圖如圖5所示。

本設(shè)計(jì)采用兩兩導(dǎo)通方式,即任一時(shí)刻只有兩相繞組導(dǎo)通,另一相繞組關(guān)閉。換相程序根據(jù)霍爾信號(hào)反饋的轉(zhuǎn)子位子信息結(jié)合旋轉(zhuǎn)方向和電機(jī)結(jié)構(gòu),制作出導(dǎo)通表,本設(shè)計(jì)采用上橋臂PWM波調(diào)制下橋臂恒通模式驅(qū)動(dòng)[4],TIM3配置成為輸入捕獲模式,當(dāng)霍爾信號(hào)變化時(shí),觸發(fā)定時(shí)器捕獲中斷服務(wù)程序,調(diào)用換相算法。

控制算法主要是實(shí)現(xiàn)電機(jī)調(diào)速,通過調(diào)節(jié)定時(shí)器輸出的PWM占空比,使實(shí)時(shí)速度達(dá)到預(yù)設(shè)的目標(biāo)速度。占空比越高,即導(dǎo)通時(shí)間越長(zhǎng),電機(jī)加速越快。本設(shè)計(jì)的控制算法采用電流-速度雙閉環(huán)PID控制[5],驅(qū)動(dòng)PWM載頻為20 kHz,占空比在20%~80%可調(diào)。速度通過捕獲霍爾傳感器變化得到,把速度環(huán)PID控制的輸出作為電流環(huán)的輸入,電流檢測(cè)是檢測(cè)線圈中心電流,速度環(huán)的輸出和中心電流作為電流環(huán)PID控制的輸入,最后決定PWM占空比控制電機(jī)運(yùn)行。速度電流雙閉環(huán)控制原理圖如圖6所示。
移植LWIP協(xié)議棧實(shí)現(xiàn)控制板的網(wǎng)絡(luò)通信,調(diào)用tcp_receive()函數(shù)實(shí)現(xiàn)數(shù)據(jù)接收,調(diào)用tcp_write()函數(shù)進(jìn)行數(shù)據(jù)發(fā)送,可以實(shí)現(xiàn)數(shù)據(jù)實(shí)時(shí)、穩(wěn)定、高效、可靠地傳輸。
4系統(tǒng)測(cè)試
電機(jī)驅(qū)動(dòng)電壓為24 V,控制器系統(tǒng)板供電15 V。驅(qū)動(dòng)調(diào)制采用上橋臂調(diào)制下橋臂恒通方式,根據(jù)轉(zhuǎn)子位子信息以及換相程序輸出PWM波至逆變器上橋臂。根據(jù)換相程序間斷性導(dǎo)通或關(guān)閉,導(dǎo)通時(shí)占空比在一定范圍內(nèi)可調(diào)。
為了測(cè)試控制器性能以及算法的優(yōu)越性,從帶負(fù)載情況、相電流、電機(jī)轉(zhuǎn)速、設(shè)定目標(biāo)速度實(shí)現(xiàn)時(shí)間等方面來測(cè)試。測(cè)試結(jié)果如表1所示。

5結(jié)論
通過對(duì)該控制器進(jìn)行整體測(cè)試可知,該系統(tǒng)集成度高,穩(wěn)定性好,體積小巧,控制芯片STM32F407內(nèi)部集成豐富的片上資源,使得系統(tǒng)可以采用內(nèi)部專用的高級(jí)定時(shí)器來控制電機(jī),采用內(nèi)部普通定時(shí)器來捕獲霍爾傳感器觸發(fā)換相程序,從而達(dá)到對(duì)電機(jī)的實(shí)時(shí)精準(zhǔn)控制。輸入驅(qū)動(dòng)PWM在20%~80%范圍內(nèi)可調(diào),設(shè)定速度通過外接電位器輸入后,電機(jī)能夠較好地完成速度變化調(diào)控,并且可以通過輕量型以太網(wǎng)協(xié)議LWIP將電機(jī)設(shè)定速度、轉(zhuǎn)速、相電流等情況上傳至上位機(jī)。
參考文獻(xiàn)
[1] 胡波,徐國(guó)卿,康勁松.無刷直流電機(jī)無位置傳感器控制技術(shù)[J].電機(jī)與控制應(yīng)用, 2007,34(5):21 23.
[2] 周波,魏佳,穆新華,等.反電勢(shì)邏輯電平積分比較法實(shí)現(xiàn)的無刷直流電機(jī)無位置傳感器控制[J].電工技術(shù)學(xué)報(bào), 2000,15(4):5 9.
[3] 楊慶保.純電動(dòng)汽車整車控制器研究[D].北京:北京交通大學(xué),2010.
[4] 韋錕.永磁無刷直流電機(jī)電磁轉(zhuǎn)矩脈動(dòng)抑制技術(shù)的研究[D].杭州:浙江大學(xué),2005.
[5] 張相軍,陳伯時(shí).無刷直流電機(jī)控制系統(tǒng)中PWM調(diào)制方式對(duì)換相轉(zhuǎn)矩脈動(dòng)的影響[J].電機(jī)與控制學(xué)報(bào),2003,7(2):8791.
