
0 引 言
目前,電壓外環(huán)電流內(nèi)環(huán)的雙環(huán)控制方案是高性能逆變的發(fā)展方向之一。雙環(huán)控制方案的電流內(nèi)環(huán)擴(kuò)大逆變器控制系統(tǒng)的帶寬,使得逆變器動(dòng)態(tài)響應(yīng)加快,非線性負(fù)載適應(yīng)能力加強(qiáng),輸出電壓的諧波含量減小。
由于考慮到濾波電感等效電阻的壓降作用和電壓外環(huán)對(duì)電流內(nèi)環(huán)的緩慢擾動(dòng)作用,為要實(shí)現(xiàn)更好的控制效果,必須對(duì)控制對(duì)象實(shí)現(xiàn)狀態(tài)反饋解耦,消除輸出電壓產(chǎn)生的交叉反饋?zhàn)饔谩1疚脑跔顟B(tài)反饋解耦的基礎(chǔ)上,建立了SPWM 的仿真" title="仿真">仿真模型,并在此基礎(chǔ)上進(jìn)行了仿真。仿真過程考慮了死區(qū)效應(yīng)和器件的損耗,因此是較為精確的模型。
1 單相電壓型逆變器的數(shù)學(xué)模型
為方便控制器的設(shè)計(jì),首先建立單相SPWM(sinusoidalpulse wIDTh modulatiON)逆變器合理的數(shù)學(xué)模型。
圖1 中E 為直流母線電壓,ui為逆變器輸出電壓,uc為電容兩端電壓,iL為流過輸出濾波電感L 的電流,io代表負(fù)載電流。濾波電感L 與濾波電容C 構(gòu)成低通濾波器" title="濾波器">濾波器。r 為包括線路電阻、死區(qū)效應(yīng)、開關(guān)管導(dǎo)通壓降、線路電阻等逆變器中各種阻尼因素的綜合等效電阻。電壓ui可以取三個(gè)值:E,0或-E,因此,電壓ui是幅值為+E 或-E 的電壓脈沖序列。
由于逆變器電路中各個(gè)功率開關(guān)器件都工作在開關(guān)狀態(tài),因此是一個(gè)線性和非線性相結(jié)合的狀態(tài),分析時(shí)有一定的難度。可假設(shè)直流母線電壓源E 的幅值恒定,功率開關(guān)為理想器件,并且逆變器輸出的基波頻率、LC 濾波器的諧振頻率與開關(guān)頻率相比足夠的低,其截止頻率通常選擇在開關(guān)頻率的1/10 ~1/5 左右,則逆變器可以簡(jiǎn)化為一個(gè)恒定增益的放大器,從而可以采用狀態(tài)空間平均法得到逆變器的線性化模型,單相電壓型SPWM 逆變器的等效電路如圖1 所示。
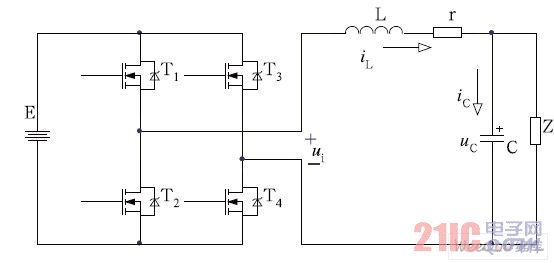
圖1 單相電壓型SPWM 逆變器等效電路
基于基爾霍夫電壓定律和電流定律,可以得到逆變器的小型號(hào)模型為:
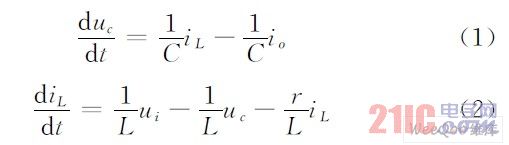
選擇電容電壓Uc和電感電流iL作為狀態(tài)變量,逆變器的連續(xù)時(shí)間狀態(tài)方程為:
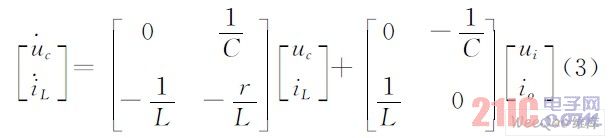
據(jù)此可以容易地推出其頻域傳遞函數(shù):

從而可以得出逆變器在頻域下的等效框圖如圖2所示。
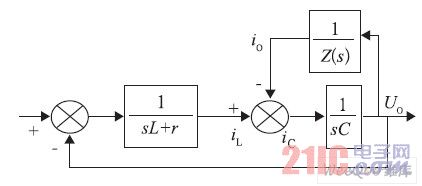
圖2 單相電壓型SPWM 逆變器的等效框圖
2 電流內(nèi)環(huán)電壓外環(huán)雙環(huán)控制的基本原理
早些年,逆變器電壓電流雙環(huán)控制用輸出電壓有效值外環(huán)維持輸出電壓有效值恒定,這種控制方式只能保證輸出電壓的有效值恒定,不能保證輸出電壓的波形質(zhì)量,特別是在非線性負(fù)載條件下輸出電壓諧波含量大,波形失真嚴(yán)重;另一方面,電壓有效值外環(huán)控制的動(dòng)態(tài)響應(yīng)過程十分緩慢,在突加、突減負(fù)載時(shí)輸出波形波動(dòng)大,恢復(fù)時(shí)間一般需要幾個(gè)甚至幾十個(gè)基波周期,瞬時(shí)控制方案可以在運(yùn)行過程中實(shí)時(shí)地調(diào)控輸出電壓波形,使得供電質(zhì)量大大提高。其中,應(yīng)用較多的有:電壓?jiǎn)苇h(huán)控制、電壓電流雙環(huán)控制、滯環(huán)控制等。
本文主要采用電流內(nèi)環(huán)電壓外環(huán)的雙環(huán)控制,結(jié)構(gòu)框圖如圖3 所示,輸出反饋電壓和給定電壓基準(zhǔn)信號(hào)比較,形成瞬時(shí)誤差調(diào)節(jié)信號(hào)。經(jīng)過電壓PI 調(diào)節(jié)器后作為電流給定基準(zhǔn)值,與電流反饋信號(hào)比較,形成瞬時(shí)誤差信號(hào),經(jīng)過電流PI 調(diào)節(jié)器產(chǎn)生電流誤差控制信號(hào)。
該信號(hào)與三角載波交截后產(chǎn)生SPWM 開關(guān)信號(hào),控制主電路開關(guān)器件,在LC 濾波器前端形成SPWM 調(diào)制電壓,經(jīng)LC 濾波器后輸出正弦電壓。
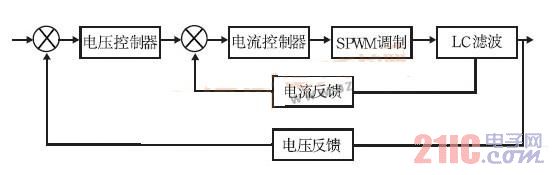
圖3 雙閉環(huán)控制系統(tǒng)框圖
2.1 具有狀態(tài)解耦的多環(huán)控制系統(tǒng)
在雙環(huán)控制系統(tǒng)中,由于電壓外環(huán)對(duì)電流內(nèi)環(huán)具有緩慢擾動(dòng)作用,要實(shí)現(xiàn)更好的控制效果,必須對(duì)控制對(duì)象進(jìn)行解耦,消除輸出電壓產(chǎn)生的交叉反饋?zhàn)饔谩?/p>
依據(jù)控制結(jié)構(gòu)的不同,效果也會(huì)不一樣,文中對(duì)以下提出兩種改進(jìn)方案進(jìn)行分析。
(1)帶負(fù)載電流解耦的電感電流反饋
如果電感電流能夠得到快速跟蹤,則相對(duì)外環(huán)來說,內(nèi)環(huán)動(dòng)態(tài)過程可以忽略,負(fù)載電流就很容易解耦。
圖4 是實(shí)現(xiàn)了負(fù)載電流解耦的內(nèi)環(huán)電感電流反饋控制結(jié)構(gòu)圖。負(fù)載電流解耦把負(fù)載電流作為電流環(huán)附加指令,不必等到電壓誤差產(chǎn)生就能提供負(fù)載所需要的電流。這樣負(fù)載突變可以通過前饋有效地抑制,不依賴外環(huán)來調(diào)節(jié),從而提高響應(yīng)速度。電感電流內(nèi)環(huán)的帶寬由Ki設(shè)置,帶寬越大,電感電流跟蹤的快速性越好,負(fù)載電流解耦的效果也越好,輸出波形的穩(wěn)態(tài)精度也越高。

圖4 電感電流反饋控制框圖
指令傳遞函數(shù):

擾動(dòng)傳遞函數(shù):

(2)帶輸出電壓解耦的電容電流反饋
從電路的角度來看,對(duì)LC 濾波器而言,出現(xiàn)負(fù)載擾動(dòng)時(shí),電感電流不能突變,只能影響電容電流。因此,電容電流反饋可以直接反映出負(fù)載電流的變化。
從擾動(dòng)的作用點(diǎn)來看,采用電容電流反饋可以將負(fù)載擾動(dòng),包含在反饋環(huán)路的前向通道內(nèi),因此可以及時(shí)對(duì)擾動(dòng)產(chǎn)生抑制。從反饋原理來看,反饋哪個(gè)量,就能增強(qiáng)那個(gè)量的穩(wěn)定度,反饋電容電流能使其在負(fù)載汲取電流時(shí)仍有維持不變的趨勢(shì)。這樣,不需要擾動(dòng)前饋補(bǔ)償,電容電流反饋結(jié)構(gòu)就可以得到比僅用電感電流反饋要好的動(dòng)態(tài)性能。從逆變器的輸出來看,只要精確保證電容電流為正弦,無論負(fù)載如何變化都可以得到良好的輸出正弦電壓。若取電感電流反饋(無負(fù)載電流前饋補(bǔ)償),那么負(fù)載擾動(dòng)只能通過電壓外環(huán)調(diào)節(jié);而取電容電流反饋,負(fù)載擾動(dòng)在內(nèi)環(huán)就可以得到及時(shí)的抑制。由于沒有檢測(cè)電感電流iL ,電感等效電阻無法解耦,其動(dòng)態(tài)輸出特性在低頻段會(huì)受到一定影響。
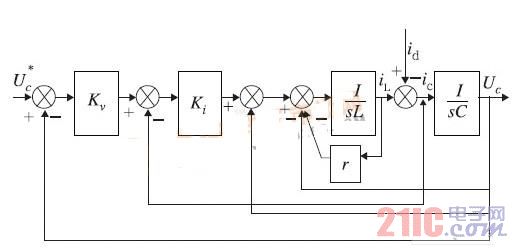
圖5 電容電流反饋控制框圖
指令傳遞函數(shù):

擾動(dòng)傳遞函數(shù):

2.2 兩種控制策略的比較
逆變器的輸出是對(duì)指令響應(yīng)和擾動(dòng)響應(yīng)的和,可以從指令傳遞函數(shù)和擾動(dòng)傳遞函數(shù)兩方面入手,分析比較兩種方案的性能。首先通過對(duì)指令傳遞函數(shù)和擾動(dòng)傳遞函數(shù)的bode 圖仿真來比較兩種方案的動(dòng)態(tài)跟蹤性能和擾動(dòng)抑制能力,從而選擇較好的控制方案。
在bode 圖仿真時(shí),系統(tǒng)參數(shù)取基波頻率60 Hz ,濾波電感L=1 .1 mH,濾波電容C=20 μF,濾波電感等效電阻r =0.6 Ω,開關(guān)頻率20 kHz ,選取KV1 =0.2 ,Ki1 =22 ,KV2 =0.2 ,Ki2 =32 。

圖6 指令傳函的對(duì)數(shù)幅頻響應(yīng)曲線
通過圖6 可以比較系統(tǒng)對(duì)指令的跟蹤效果,可以看到兩種方案低頻段增益均為1 ,能夠完全復(fù)現(xiàn)指令,開環(huán)逆變器的諧振峰均被消除,具有良好的指令動(dòng)態(tài)跟蹤性能。
既然逆變器輸出是對(duì)指令響應(yīng)和擾動(dòng)響應(yīng)的綜合,那么只分析逆變器對(duì)指令的跟蹤效果是不夠的,還要考慮對(duì)擾動(dòng)的抑制能力,擾動(dòng)傳函的對(duì)數(shù)幅頻響應(yīng)曲線就能表征這個(gè)能力。
通過圖7 可以看到,由于擾動(dòng)主要位于低頻段,所以通過這一段的波特圖判斷擾動(dòng)抑制性能,低頻增益越小,表明系統(tǒng)對(duì)擾動(dòng)的衰減越厲害,即對(duì)擾動(dòng)的抑制效果越好。如圖所示,方案一對(duì)7 次以下的諧波均有衰減作用,方案二對(duì)5 次以下的諧波均有衰減作用,在60 Hz 處,方案一對(duì)基波擾動(dòng)的抑制要好于方案二,這是因?yàn)榉桨付]有實(shí)現(xiàn)電感等效電阻解耦,基波在這個(gè)電阻上有壓降,影響了輸出波形。
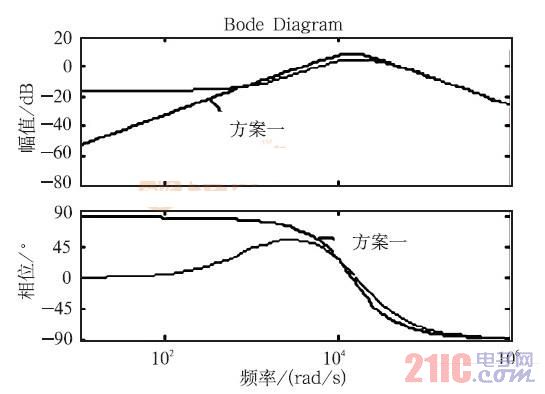
圖7 擾動(dòng)傳函的對(duì)數(shù)幅頻響應(yīng)曲線
通過以上對(duì)指令和擾動(dòng)傳遞函數(shù)的分析可知,兩種方案對(duì)指令的跟蹤能力是很接近的,因此選擇方案的主要依據(jù)是它們對(duì)擾動(dòng)的抑制能力。方案一通過前饋而方案二通過反饋對(duì)擾動(dòng)進(jìn)行補(bǔ)償,考慮到反饋電感電流能夠?qū)崿F(xiàn)電感等效電阻解耦,故方案一在低頻段的擾動(dòng)抑制能力強(qiáng)于方案二,因此,選擇方案一作為系統(tǒng)的控制結(jié)構(gòu)。
3 系統(tǒng)仿真
3 .1 系統(tǒng)仿真模型
本文在MATLAB 環(huán)境下的Simulink 中建模和仿真。該仿真模型主要分為兩個(gè)部分:主電路和控制器。主電路如圖8 所示,控制器主要由電壓電流反饋環(huán)節(jié)、負(fù)載電流補(bǔ)償環(huán)節(jié)、SPWM 發(fā)生環(huán)節(jié)和死區(qū)延遲環(huán)節(jié)組成。從主電路仿真模型可以看到:在檢驗(yàn)突加、突減非線性負(fù)載時(shí),用兩個(gè)脈沖波、乘法器和理想開關(guān)組成矩形脈沖信號(hào),周期為0.4 s ,在0。2 s 時(shí)突加額定負(fù)載,在0.4 s 時(shí),突減額定負(fù)載。系統(tǒng)仿真參數(shù)取基波頻率為60 Hz ,直流母線電壓E=400 V,濾波電感L=1 .1 mH,濾波電容C=20 μF,濾波電感等效電阻r=0.6 Ω,開關(guān)頻率為20 kHz ,輸出電壓幅值為220 V,輸出額定功率因數(shù)cosΦ=0.8 。
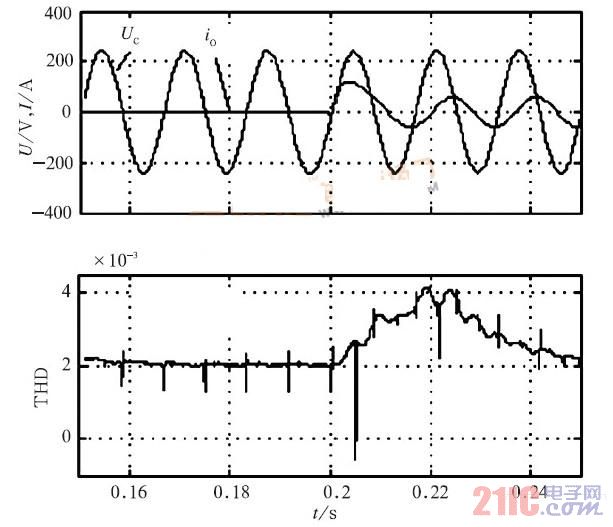
圖8 主電路仿真模型
3 .2 仿真結(jié)果分析
在以下三種不同運(yùn)行條件下進(jìn)行仿真實(shí)驗(yàn):
(1)在0~0.2 s 期間,逆變器空載運(yùn)行;0.2 s 時(shí)突加負(fù)載運(yùn)行。
(2)在0.2 s ~0.4 s 期間,逆變器在額定負(fù)載下運(yùn)行。
(3)在0.4 s 時(shí),逆變器突減負(fù)載運(yùn)行。
三種條件下,輸出電壓、負(fù)載電流的波形圖和輸出電壓THD 的波形如圖9 ,圖10 ,圖11。

圖9 突加非線性負(fù)載運(yùn)行

圖10 額定負(fù)載運(yùn)行

圖11 突減非線性負(fù)載運(yùn)行
仿真結(jié)果表明,基于狀態(tài)反饋解耦的雙環(huán)控制系統(tǒng)在不同的負(fù)載條件下,不但能獲得高質(zhì)量的輸出電壓波形,并且動(dòng)態(tài)響應(yīng)速度快:
(1)系統(tǒng)動(dòng)態(tài)響應(yīng)快,在三種條件下運(yùn)行,都可以在兩個(gè)周期內(nèi)(<0.4 s )進(jìn)入穩(wěn)態(tài)。
(2)輸出電壓質(zhì)量高,諧波含量少,在突加突減負(fù)載時(shí),總THD 值不超過0.4 %,進(jìn)入穩(wěn)態(tài)后,THD 值不超過0.3 %。
(3)抗干擾能力強(qiáng),對(duì)突加突減非線性負(fù)載所引起的波形失真具有很強(qiáng)的抑制能力,在兩個(gè)周期內(nèi)(<0.4 s ),就可校正波形失真。
4 結(jié) 論
本文建立的電壓電流雙環(huán)控制系統(tǒng),采用負(fù)載電流解耦的內(nèi)環(huán)電感電流反饋、狀態(tài)反饋解耦控制結(jié)構(gòu),對(duì)單相SPWM 逆變器進(jìn)行建模與仿真。仿真結(jié)果表明,所采用的控制方案使逆變器具有輸出電壓質(zhì)量高(總THD≤0.4 %),動(dòng)態(tài)響應(yīng)速度快(不超過0.4 s ),抗干擾能力強(qiáng)等優(yōu)點(diǎn),能夠較好地達(dá)到高性能指標(biāo)的要求,具有很高的工業(yè)使用價(jià)值。