
0 引 言
隨著數(shù)字信號(hào)處理技術(shù)的日臻完善以及數(shù)字處理器價(jià)格的不斷降低,數(shù)字控制在DC/DC 變換器中得到廣泛應(yīng)用。與模擬控制相比,數(shù)字控制具有更加優(yōu)越的控制性能、更加穩(wěn)定的系統(tǒng)輸出,以及易于實(shí)現(xiàn)電源系統(tǒng)的智能化管理等諸多優(yōu)勢(shì)。
數(shù)字PID 控制因其算法簡(jiǎn)單、魯棒性好及可靠性高,廣泛應(yīng)用于DC/DC 變換器的數(shù)字控制領(lǐng)域。Buck 型變換器包括Buck 變換器及其衍生的全橋變換器。當(dāng)前,數(shù)字PID 參數(shù)往往通過(guò)試湊法整定,耗時(shí)費(fèi)力,同時(shí)控制性能欠佳、適應(yīng)性較差。長(zhǎng)期以來(lái),人們一直在尋求更加有效的數(shù)字PID 參數(shù)整定方法。
1 數(shù)字控制Buck 型變換器系統(tǒng)結(jié)構(gòu)
數(shù)字控制Buck 型變換器的系統(tǒng)框圖如圖1 所示。反饋控制回路中包含AD 采樣器、誤差生成器、PID 控制器以及PWM 波形產(chǎn)生器等模塊,所有模塊均以數(shù)字處理芯片作為載體,通過(guò)編程方式實(shí)現(xiàn)。
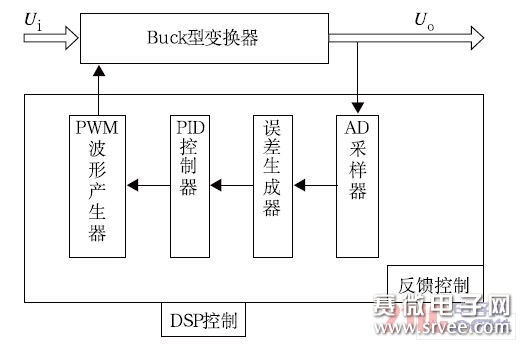
圖1 數(shù)字控制Buck 型變換器系統(tǒng)框圖
2 數(shù)字PID 控制器設(shè)計(jì)
數(shù)字系統(tǒng)是離散系統(tǒng),但如果采樣周期足夠小,則數(shù)字系統(tǒng)可近似于連續(xù)系統(tǒng)。采用頻域補(bǔ)償設(shè)計(jì)方法實(shí)現(xiàn)模擬PID 控制器的參數(shù)整定,通過(guò)連續(xù)系統(tǒng)離散化處理,可最終實(shí)現(xiàn)數(shù)字PID 控制器的參數(shù)設(shè)計(jì)。
2 .1 模擬PID 控制器的參數(shù)整定
連續(xù)導(dǎo)電模式(CCM)下,Buck 型變換器控制對(duì)象的傳遞函數(shù)為:

直流增益:
ADC =nUi/Um,UM為PWM 產(chǎn)生器的鋸齒波峰峰值;極點(diǎn)角頻率: ;;品質(zhì)因數(shù):Q=R√C/R。
;;品質(zhì)因數(shù):Q=R√C/R。
Buck 型變換器的典型頻率特性曲線(xiàn)如圖2 所示。
由頻率特性曲線(xiàn)可知:
(1)幅頻特性的低頻段曲線(xiàn)平坦,欲消除閉環(huán)系統(tǒng)的穩(wěn)態(tài)誤差,補(bǔ)償網(wǎng)絡(luò)的設(shè)計(jì)應(yīng)至少含有一個(gè)積分環(huán)節(jié);(2)主極點(diǎn)wp由LC 輸出濾波器產(chǎn)生,表現(xiàn)為一個(gè)雙重極點(diǎn),產(chǎn)生180°的滯后相移,系統(tǒng)相位裕量偏低。

圖2 連續(xù)導(dǎo)電模式(CCM)下Buck 型變換器頻率特性曲線(xiàn)
模擬PID 控制器的傳遞函數(shù)為:

其比例、積分、微分形式為:

式中:Kp =K(wz1 +wz2 )/(wz1 wz2 );Ki =K;Kd =K/(wz1 wz2 )。
模擬PID 控制器的典型頻率特性曲線(xiàn)如圖3 所示。補(bǔ)償網(wǎng)絡(luò)可提供一個(gè)原點(diǎn)處極點(diǎn)用以消除系統(tǒng)的靜態(tài)誤差,同時(shí)提供兩個(gè)零點(diǎn)可補(bǔ)償主極點(diǎn)造成的180°滯后相移,有效提高系統(tǒng)的相位裕量。
在分析了Buck 型變換器及模擬PID 控制器典型頻率特性的基礎(chǔ)上,采用頻域補(bǔ)償設(shè)計(jì)法配置補(bǔ)償網(wǎng)絡(luò)零極點(diǎn),實(shí)現(xiàn)模擬PID 控制器的參數(shù)整定。
模擬PID 控制器零極點(diǎn)配置原則如下:
(1)選擇補(bǔ)償后系統(tǒng)開(kāi)環(huán)傳遞函數(shù)的穿越角頻率:
穿越角頻率wc一般取1/10 ~1/5 的開(kāi)關(guān)角頻率ws處,以在保證系統(tǒng)穩(wěn)定性的前提下,使輸出響應(yīng)具有良好的動(dòng)態(tài)特性;(2)確定補(bǔ)償網(wǎng)絡(luò)兩零點(diǎn)角頻率:補(bǔ)償網(wǎng)絡(luò)的兩零點(diǎn)角頻率wz1 、wz2設(shè)計(jì)為控制對(duì)象主極點(diǎn)角頻率wp的1/2 左右,以補(bǔ)償主極點(diǎn)產(chǎn)生的180°滯后相移,提高系統(tǒng)的相位裕量;(3)計(jì)算補(bǔ)償網(wǎng)絡(luò)的增益值:在穿越角頻率wc處補(bǔ)償后系統(tǒng)開(kāi)環(huán)傳遞的增益為零,即|Gvdm(s )|s =jwc =1/|Gc (s )|s =jwc ,據(jù)此計(jì)算補(bǔ)償網(wǎng)絡(luò)增益值K。
按照以上步驟即可完成模擬PID 控制器參數(shù)(Kp 、Ki 、Kd )的整定。
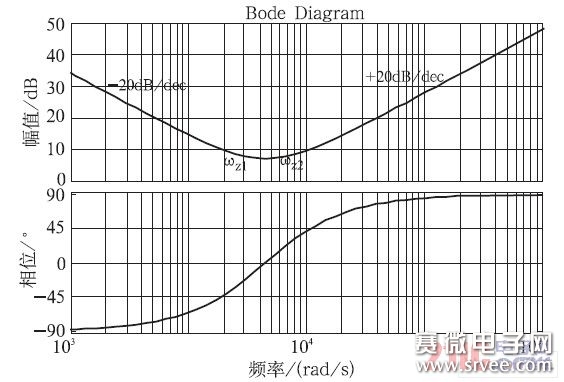
圖3 模擬PID 控制器典型頻率特性曲線(xiàn)
2 .2 數(shù)字PID 控制器的參數(shù)設(shè)計(jì)
數(shù)字PID 控制器的控制算式為:

式中:Δup =e(k)-e(k-1 );Δu1 =e(k);ΔuD =e(k)-2e(k-1)+e(k-2)。
模擬PID 控制器參數(shù)整定完成后,將模擬控制器離散化即可實(shí)現(xiàn)數(shù)字PID 控制器的設(shè)計(jì)。本文選用后向差分法作為連續(xù)系統(tǒng)離散化方法。
后向差分公式為:

選取采樣周期T,對(duì)式(3 )進(jìn)行離散化處理,整理得:

將上式與數(shù)字PID 控制算式對(duì)比,可得模擬PID控制器參數(shù)離散化公式:

3 Buck 型變換器數(shù)字PID 控制器設(shè)計(jì)實(shí)例
仿真用Buck 及全橋變換器的電路參數(shù)如表1 所示,數(shù)字PWM 脈沖產(chǎn)生器均按D=u(k)/M 設(shè)計(jì),其中M=4(M 對(duì)應(yīng)于模擬PWM 產(chǎn)生器的鋸齒波峰峰值Um)。
模擬PID 控制器零極點(diǎn)均按照以下方式配置:wc=1/5ws ,wz1 =wz2 =1/2wp ,則模擬及數(shù)字PID 控制器整定參數(shù)如表2 所示,采樣周期T=1×10-7s 。
表1 仿真用Buck 及全橋變換器電路參數(shù)

表2 仿真用Buck 及全橋變換器模擬及數(shù)字PID 控制器整定參數(shù)

根據(jù)圖1 所示的數(shù)字控制Buck 變換器系統(tǒng)框圖,依據(jù)電路參數(shù)及數(shù)字PID 控制器整定參數(shù),在MATLAB/SIMULINK 仿真環(huán)境中建立數(shù)字控制Buck 及全橋變換器仿真模型,仿真結(jié)果如下:
額定負(fù)載條件下,數(shù)字控制Buck 及全橋變換器輸出電壓響應(yīng)如圖4 所示。

圖4 額定負(fù)載條件下輸出電壓響應(yīng)
額定負(fù)載突變至50 %額定負(fù)載條件下,數(shù)字控制Buck 及全橋變換器的輸出電壓響應(yīng)如圖5 所示。

圖5 負(fù)載突變情況下,輸出電壓響應(yīng)
4 結(jié) 論
仿真結(jié)果表明,采用頻域補(bǔ)償設(shè)計(jì)方法整定模擬PID 控制器參數(shù)進(jìn)而通過(guò)連續(xù)系統(tǒng)離散化方法設(shè)計(jì)實(shí)現(xiàn)的數(shù)字PID 控制器,能夠滿(mǎn)足Buck 型變換器系統(tǒng)的控制要求,輸出響應(yīng)具有良好的靜態(tài)與動(dòng)態(tài)特性。