
目前,,全景技術(shù)的研究主要將注意力集中在集合變換算法和鏡頭矯正算法的改進(jìn),對實時性問題研究較少,。本系統(tǒng)利用FPGA對圓形極坐標(biāo)圖像進(jìn)行實時展開,。
系統(tǒng)總體設(shè)計
本系統(tǒng)在以EP2C70 FPGA芯片為核心的DE2-70開發(fā)板上實現(xiàn),系統(tǒng)主要模塊如圖1所示,。

(1)視頻采集模塊:將ADV7180芯片輸出的數(shù)字視頻信號采集到SDRAM中緩存,并獲取相應(yīng)的控制信號,。
(2)VGA控制模塊:將已經(jīng)處理好的數(shù)字視頻信號輸出到ADV7123,,之后進(jìn)入VGA顯示器進(jìn)行顯示,并生成VGA控制信號和坐標(biāo)信號,。
(3)展開算法模塊:利用VGA控制模塊產(chǎn)生的坐標(biāo)信號對極坐標(biāo)數(shù)字視頻信號進(jìn)行展開操作,,生成矩形視頻信號。
系統(tǒng)模塊設(shè)計
根據(jù)系統(tǒng)框圖,,本系統(tǒng)可分為以下幾個主要模塊:視頻采集模塊,、展開算法模塊和VGA控制模塊。系統(tǒng)時鐘為ADV7180產(chǎn)生的27MHz像素時鐘,,保證了采集與處理的同步進(jìn)行,。
視頻采集模塊
視頻采集模塊接收由ADV7180芯片串行輸出的格式為ITU-R BT.656、分辨率為720×525的數(shù)字視頻信號,,并提取信號中有效像素信息,,同時將其轉(zhuǎn)換為分辨率為640×480的數(shù)字視頻信號,存入SDRAM中,,之后,,再提取緩存中數(shù)據(jù)轉(zhuǎn)換為適合VGA顯示的RGB信號傳輸?shù)胶罄m(xù)模塊。
ITU-R BT.656解碼器
ITU-R BT.656協(xié)議以27MHz速率復(fù)用傳送數(shù)字視頻數(shù)據(jù),,其順序是:Cb,,Y,Cr,,Y,,Cb,Y,,Cr,,?? 其中,Cb,,Y,,Cr 這三個字指的是同一個像素的亮度和色差信號,之后的Y 對應(yīng)于下一個像素的亮度,。Y,、Cb,、Cr在傳輸中數(shù)據(jù)量的比為Y:Cb:Cr=4:2:2。另外,,信號同時包括相應(yīng)的場,、行信號。ITU-R BT.656解碼器的目的是將ADV7180芯片產(chǎn)生的ITU-R BT.656協(xié)議數(shù)據(jù)流中的8位像素信息提取出來,,并根據(jù)協(xié)議中的控制信號生成相應(yīng)的行列掃描信號與像素有效信號,。在提取像素信息的同時,將數(shù)據(jù)存儲順序變換為:Y,,Cb,,Y,Cr,,Y,,Cb,Y,,Cr??,。在存入SDRAM時,偶數(shù)地址存儲{Y,,Cb},,奇數(shù)地址存儲{Y,Cr},。
SDRAM控制器
SDRAM控制器采集ITU-R BT.656解碼器輸出的像素信號,,將其存入DE2-70開發(fā)板上的IS42S16160B SDRAM中。系統(tǒng)將其設(shè)計為一個四端口控制器,,包括兩個讀口和兩個寫口,,并且使用108MHz時鐘驅(qū)動SDRAM控制器和SDRAM芯片,保證在分頻之后,,每一個讀寫端口的頻率為27MHz,,與像素時鐘同步。
由于ADV7180產(chǎn)生的視頻數(shù)據(jù)流是隔行掃描數(shù)據(jù),,分為奇數(shù)場和偶數(shù)場,,所以SDRAM控制器除了對數(shù)據(jù)流進(jìn)行存儲,還要在讀取數(shù)據(jù)時進(jìn)行去交織操作,。SDRAM控制器的雙讀口設(shè)計可以出色地完成去交織任務(wù),。在讀取數(shù)據(jù)時,利用VGA的行掃描信號控制這兩個讀口分別讀?。寒?dāng)VGA控制器掃描到奇數(shù)行時,,由第一個讀口讀取相應(yīng)奇數(shù)行數(shù)據(jù);否則,由第二個讀口讀取相應(yīng)偶數(shù)行數(shù)據(jù),。之后,,再合并這兩個讀口讀取的數(shù)據(jù)得到逐行掃描的,、分辨率為640×480的視頻數(shù)據(jù)流。
YCbCr到RGB轉(zhuǎn)換模塊
本系統(tǒng)的最終目的是將視頻流輸出到VGA顯示器進(jìn)行顯示,,而從SDRAM讀取得到的數(shù)據(jù)是YCbCr422格式,,不符合VGA顯示要求,所以需要將其轉(zhuǎn)換為RGB數(shù)據(jù)格式,。
首先將YCbCr422格式轉(zhuǎn)換為YCbCr444格式,。在每一個時鐘上跳沿,判斷當(dāng)前VGA列掃描信號,,若當(dāng)前列為奇數(shù),,則將SDRAM讀口得到的16位YCbCr信號的前8位賦值給Y作為當(dāng)前像素的Y值,后8位賦值給Cr作為當(dāng)前像素的Cr值,,Cb保持不變;若當(dāng)前列為偶數(shù),,則YCbCr的前8位仍為當(dāng)前像素的Y值,,后8位為當(dāng)前像素的Cb值,,Cr保持不變。這樣就保證了輸出的Y,、Cb,、Cr三個信號是當(dāng)前像素的對應(yīng)描述信號。
在確定了每個像素對應(yīng)的YCbCr值之后,,就可以通過如下公式計算得到對應(yīng)的RGB值,。
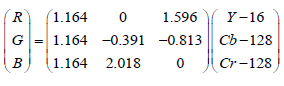
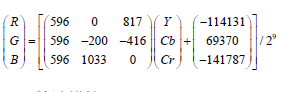
DE2-70上的EP2C70 FPGA芯片內(nèi)嵌了150個乘法器塊,每一個乘法器塊可以配置為兩個9×9位的乘法器或者一個18×18位的乘法器,。所以本系統(tǒng)使用QuartusⅡ中集成的MegaWizard Plug-In Manager配置乘加器模塊用于實現(xiàn)YCbCr顏色空間到RGB顏色空間的轉(zhuǎn)換,。另外,上述轉(zhuǎn)換公式涉及浮點運算,,在Verilog中不易實現(xiàn),,所以將公式中各浮點值左移9位變?yōu)檎麛?shù),從而公式調(diào)整為:
展開算法模塊為本系統(tǒng)的核心模塊,,利用EP2C70內(nèi)嵌的M4K存儲器和正余弦生成器實現(xiàn)了極坐標(biāo)視圖到直接坐標(biāo)視圖的實時展開,。
人眼視角約為120°??紤]到人眼觀察的習(xí)慣,,系統(tǒng)將圓形的極坐標(biāo)視圖分割成為第一、二,、三,、四象限四個部分,每部分90°,,由使用者選取感興趣的部分進(jìn)行展開,,這樣既符合人眼觀察的習(xí)慣,,又節(jié)省了空間。

視頻分塊
全景極坐標(biāo)視圖在顯示器上顯示時類似于圖5,,其中矩形代表整個顯示器顯示的內(nèi)容,,分辨率為640×480,圓形代表全景圖像出現(xiàn)的位置,,半徑大約為240個像素,,所以可以按圖5中虛線部分將視頻每一幀分為4塊,每一塊分辨率為240×240,。系統(tǒng)使用VGA控制器生成的行列掃描信號標(biāo)定當(dāng)前像素的位置,,當(dāng)像素位置位于全景圖像區(qū)域內(nèi)時,則將像素值存入M4K存儲器,,否則繼續(xù)搜索下一個滿足條件的像素,。
M4K存儲器設(shè)計
M4K存儲器是內(nèi)嵌在EP2C70中的存儲器塊,其中每一塊容量達(dá)到4096bit,,可配置為真雙口存儲器,,在EP2C70芯片上共有250塊M4K存儲器塊。本系統(tǒng)使用了209塊M4K存儲器塊,,借助其高尋址精度,,實現(xiàn)圖像的實時展開。
M4K存儲器寫地址
將數(shù)據(jù)寫入M4K存儲器時,,可以將數(shù)據(jù)流按照圖像顯示順序全部存入,,這樣就需要生成0~360°的所有正余弦查找表;同時,由于存入了全部圖像信息,,將會有1/4左右的無效像素點,,浪費了寶貴的存儲器資源。系統(tǒng)利用M4K存儲器精確的尋址操作將第二,、三,、四象限的信息在存入時進(jìn)行翻轉(zhuǎn),使得存入M4K存儲器的圖像僅顯示為第一象限的特性,,則只需要生成0~90°的正余弦表就可以完成對整幅圖像的展開計算,。其次,固定攝像頭之后,,圓形全景圖像在顯示器中的位置是固定的,,所以可以確定每一行有效像素的坐標(biāo)范圍。當(dāng)行列掃描信號在此范圍之內(nèi),,則將該像素值存入M4K存儲器中,,否則,繼續(xù)尋找下一個符合條件的像素點。所以,,對第i象限的第M行第N個像素,,如果為有效像素,則存入M4K存儲器的地址按如下規(guī)則計算:
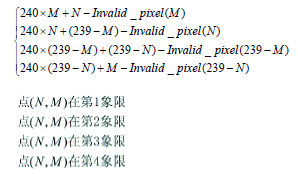
這里的M和N取值范圍均為[0,239],,Invalid_pixel(K)表示在第K行第一個有效像素之前所有無效像素點總數(shù),。
M4K存儲器讀地址
M4K存儲器的讀操作完成了全景圖像的展開。本系統(tǒng)采用極坐標(biāo)與直角坐標(biāo)的對應(yīng)關(guān)系實現(xiàn)全景圖像展開,。如圖6所示,,全景圖像中的點P(x,y)在矩形圖像中對應(yīng)的點為P’(x’,y’),則x’,y’與x,y的對應(yīng)關(guān)系應(yīng)為:


其中xΔ為橫坐標(biāo)方向角度步長,,yΔ為縱坐標(biāo)方向上的半徑步長,,分別由以下參數(shù)確定:
之前對不同象限圖像的翻轉(zhuǎn)存儲操作已經(jīng)簡化了M4K中數(shù)據(jù)的讀取,所以只需要0~90°的正余弦查找表,,查找表長度為640,。在VGA顯示器上的第M行第N個像素,其對應(yīng)像素值在M4K存儲器中的地址按如下規(guī)則進(jìn)行計算:

其中sin_table(N)和cos_table(N)為正余弦查找表中第N列對應(yīng)的正余弦值,。
VGA控制模塊
VGA控制模塊根據(jù)系統(tǒng)時鐘生成行同步信號和場同步信號,,同時接收前端模塊生成的RGB像素信號,并參照VGA顯示標(biāo)準(zhǔn)對VGA顯示進(jìn)行控制,。本系統(tǒng)采用640×480的顯示分辨率,,幀速為64.4fps,。
系統(tǒng)性能
本系統(tǒng)每一幀畫面分辨率為640×480,,像素時鐘為27MHz,在不考慮實時顯示而只考慮存儲的條件下,,一秒鐘內(nèi)可存儲87.89幀圖像,。另外,如果忽視人眼觀察習(xí)慣,,一次性展開整幅圖像,,幀速將降低為原來的四分之一,即21.97fps,,展開圖像分辨率提高到2560×480,。
總結(jié)
本文以Terasic公司的DE2-70開發(fā)板為平臺,實現(xiàn)了對反射式全景攝像機(jī)采集的全景視頻流的實時展開,,系統(tǒng)結(jié)構(gòu)清晰,,具有較高的穩(wěn)定性和可操作性。系統(tǒng)時鐘為27MHz,,顯示分辨率為640×480,,幀速達(dá)到64.4fps,達(dá)到了實時性的要求。