
0 引言
隨著國民經(jīng)濟的發(fā)展和用電設備的不斷增加,對UPS" title="UPS">UPS容量的要求越來越大。大容量的UPS有兩種構成方式:一種是采用單臺大容量UPS;另一種是在UPS單機內部采用功率模塊" title="模塊">模塊N+m冗余并聯(lián)" title="余并聯(lián)">余并聯(lián)結構" title="結構">結構。前者的缺點是成本高、體積重量大、運輸安裝困難、可靠性差,一旦出現(xiàn)故障將會引起供電癱瘓。后者的好處是提高了供電的靈活性,可以將小功率模塊的開關頻率提高到MHz級,從而提高了模塊的功率密度,使UPS的體積重量減小;并且減小了各模塊的功率開關器件的電流應力,提高了UPS的可靠性;同時動態(tài)響應快,可以實現(xiàn)標準化,便于維修更換等。
N+m冗余并聯(lián)技術是專門為了提高UPS的可靠性和熱維修〔也稱作熱插拔和熱更換(hotplug-in)〕而采用的一種新技術。所謂N+m冗余并聯(lián),是指在一個UPS單機內部,采用N+ m個相同的電源模塊(power supply units,簡稱PSU)并聯(lián)組成UPS整機。其中N代表向負載提供額定電流的模塊個數(shù),m代表冗余模塊個數(shù)。m越大USP的可靠性越高,但UPS的成本也越高。在正常運行時UPS由N+ m個模塊并聯(lián)向負載供電,每個模塊平均負擔1/(N+m)的負載電流,當其中某一個或k個(k≤m)模塊故障時,就自行退出供電,而由剩下的N+(m-k)個模塊繼續(xù)向負載提供100%的電流,從而保證了USP的不間斷供電。
1 N+m冗余并聯(lián)的可靠性、可用性及條件
1.1 可靠性的提高
由N+m個小功率模塊組成的冗余并聯(lián)結構形式的UPS如圖1和圖2所示。圖1是采用n個整流模塊、一組蓄電池和k個逆變" title="逆變">逆變模塊組成的冗余并聯(lián)結構形式,n可以等于k,也可以不等于k。圖2是采用n個整流模塊、n組蓄電池和n個逆變模塊組成的UPS模塊冗余并聯(lián)結構形式。圖3是采用單一大功率整流模塊、一組蓄電池和一個大功率逆變模塊組成的結構形式,是一般UPS常用的結構形式。

圖1 n個整流模塊和k個逆變模塊組成的冗余并聯(lián)式UPS

圖2 n個整流模塊和n個蓄電池及n個逆變模塊組成的冗余并聯(lián)式UPS

圖3 單臺大容量UPS的結構形式
下面我們以圖2所示的冗余并聯(lián)結構為例,說明為什么冗余并聯(lián)結構能夠使可靠性得以提高。當n=k=N+m時,假定由一個整流模塊和一組蓄電池及一個逆變模塊組成的UPS模塊(如圖2中虛線框內所示)的可靠性為P1,則N+ m個UPS模塊的可靠性為
PN+m=1-(1-P1)N+m
例如,當一個UPS模塊的可靠性P1=0.99時(不可靠性為1%),如果N+m=3,則
P3=1-(1-0.99)3=0.999999
3個UPS模塊的并聯(lián)可以將可靠性提高4個數(shù)量級,不可靠性由原來的1%降到了0.000001%。
1.2 可用性的提高
UPS的可用性的一般定義為
可用性(Availability)=![]() (1)
(1)
式中:MTBF為平均無故障時間,反映UPS的可靠性及冗余性;
MTTR為平均維修時間,即維修所需要的時間。
式(1)說明,UPS的可用性不僅僅取決于MTBF,而且還取決于MTTR,只有采用熱更換(熱插拔)方式,才能使UPS實現(xiàn)不停機更換模塊,即不中斷供電維修,這樣才能真正減小MTTR,提高可用性。要實現(xiàn)UPS的熱插拔不停機更換模塊技術,必須滿足3個條件:一是正常工作UPS模塊自動投入電網(wǎng);二是并聯(lián)運行的UPS模塊之間要實現(xiàn)有功和無功電流的平均分配;三是USP退出并聯(lián),特別是在不干擾電網(wǎng)的情況下快速切除故障的USP模塊。有了這3個方面的工作,也就解決了USP模塊的熱插拔(熱更換)技術。
通常采用的是N+1(即m=1)冗余并聯(lián)方式,這種方式已在通信直流電源中得到了成功應用。直流電源的N+1冗余并聯(lián)運行技術比較簡單,只需要使電壓的大小和極性相同就可以了,而且還能很方便地用二極管來隔離故障的模塊。但是,對于UPS交流電源模塊的并聯(lián)技術要復雜得多,它需要使相序、頻率、相位、電壓幅值和波形等5個參數(shù)相同才能并聯(lián)。同時對故障模塊的隔離也不能用二極管來實現(xiàn)。
USP模塊的并聯(lián),也不同于同步發(fā)電機的并聯(lián),后者由于輸出阻抗高,靠其本身的下垂特性可以自行均流。同時輸出電流大的發(fā)電機可以自行降低轉速,達到頻率和相位的一致。而USP模塊不具備這些特性,需要用控制電路來解決靜態(tài)和動態(tài)同步均流及熱插拔技術。
1.3 UPS模塊實現(xiàn)N+1冗余并聯(lián)的條件
USP模塊的N+1冗余并聯(lián)技術,是提高USP可靠性和可用性的關鍵技術,模塊的并聯(lián)必須滿足以下3個條件才能實現(xiàn):
1)各個UPS模塊的頻率、相位、相序、電壓幅值和波形必須相同;
2)各個UPS模塊在輸入電壓和負載的變化范圍內,必須能夠實現(xiàn)對負載有功和無功電流的均勻分配,為此要求均流電路的動態(tài)響應特性要好,穩(wěn)定度要高;
3)當均流或同步出現(xiàn)異常情況或UPS模塊出現(xiàn)故障時,應能自動檢出故障模塊,并將其迅速切除而又不影響UPS的正常運行。
其中有兩項關鍵技術:一是同步技術,另一個是均流技術。前者主要是解決各UPS模塊的頻率、相位、波形和相序的一致,后者主要是解決各UPS模塊均勻負擔負載功率的問題。由于各個UPS模塊都是與市電電網(wǎng)同步并聯(lián)工作的,在各個UPS模塊中都有相同的相應電路或各模塊有一共用的相應電路來實現(xiàn)與市電的同步,同步后各模塊的頻率、相位、波形和相序都與市電電網(wǎng)相同,滿足了條件1)中五個參數(shù)的四個。只有各模塊之間的輸出電壓可能有些差別,這種差別主要是由直流電壓的不同(例如蓄電池電壓不同),或模塊內阻壓降不同(例如整流管或逆變器開關器件的正向壓降的不同)等引起的。因此,均流就成了UPS模塊并聯(lián)工作的主要問題,必須用均流的辦法使各UPS模塊的輸出電壓一致。由于各個模塊的輸出是通過共用母線加到負載上的,這相當于各個模塊共同負擔同一個負載,所以,各模塊的輸出負載功率因數(shù)只取決于母線上總的負載的功率因數(shù),因此,各模塊的輸出功率因數(shù)相同,在均流時不必再區(qū)分有功和無功,只對模塊的總輸出電流進行均流即可。下面介紹模塊的均流方法。
2 USP模塊的均流
UPS模塊的均流有多種方法,例如,自整步均流法、外特性下垂法、外部控制法、主從控制均流法、平均電流均流法、自動均流法和民主主從均流法等。在這些均流法中,并不都適合于UPS模塊的N+1冗余并聯(lián),例如,外特性下垂法和基于外特性下垂法的均流法,使模塊的輸出外特性變軟,電壓調整率降低,不適合于對輸出電壓精度要求較高(例如±1%~±3%)的USP應用;主從均流法必須要有通信連線,將使系統(tǒng)復雜化,同時,如果主USP模塊一旦失敗,則整個UPS就不能工作,因此,主從均流法也不適用于UPS的冗余并聯(lián)系統(tǒng),再則電壓環(huán)的帶寬較大,也易受外界噪聲的干擾;外部控制法需要外加專門的控制器,UPS模塊要進行多路聯(lián)系,連線較復雜也不能實現(xiàn)冗余并聯(lián),故也不適合于USP的多模塊冗余并聯(lián);平均值電流法的輸出電流,是通過跟蹤同一個給定電流來實現(xiàn)均流的,各模塊之間的信號連線較多,同時也不能實現(xiàn)冗余并聯(lián),故也不能采用;只有自動均流法和民主主從均流法既適合于USP模塊的冗余并聯(lián)工作,又不影響輸出電壓的精度,電路也比較簡單,是一種比較好的均流法。
自動均流法和民主主從均流法,都是源于上個世紀80年代的直流均流法。將這兩種直流均流法應用于交流均流時,只須加一個整流環(huán)節(jié),將交流信號變換成直流信號就可以了。由于逆變器的交流穩(wěn)壓控制的基準電壓給定值,一般都是采用與電壓有效值等效的直流信號。所以,均流電路輸出的直流調整控制信號,可以直接用于通過對基準電壓直流給定信號的改變,來實現(xiàn)USP模塊的交流均流。
2.1 自動均流法
自動均流法(automatic approach)又稱作外加均流器法(external controller approach)。在每一個模塊的控制電路中都需要加一個特殊的均流控制器〔sharingcontroller,(SC)〕,用以檢測并聯(lián)各模塊輸出電流的不均衡情況,輸出調整控制信號Uck,以控制各個模塊實現(xiàn)輸出均流。這種均流法需要加一根均流母線(sharebus)的帶寬較窄的通信線連接各個模塊,均流母線上的電壓為UB。
圖4給出N個模塊并聯(lián)系統(tǒng)的自動均流法的原理框圖。圖中只示出了均流控制環(huán),電壓控制環(huán)沒有畫出,它由模塊的控制電路來實現(xiàn)。

圖4 N個模塊并聯(lián)的自動均流法的原理框圖
模塊k(k=1,2,……N)的均流控制器SCK,其輸入為均流母線電壓UB和模塊k的輸出負載電流Ik的直流檢測信號UIk,SCk的輸出電壓信號Uck與基準電壓給定值Ug相加,產(chǎn)生出基準電壓Urk,用基準電壓UrK對UPS模塊中的逆變器進行PWM控制,就可以使模塊的輸出電壓發(fā)生變化,以達到均流的目的。為了檢測各個模塊的輸出電流,在均流控制器的輸入端接了一個采樣電阻R。如果把均流母線看成是一個節(jié)點,根據(jù)電工學中基爾霍夫定律可知:流入均流母線的總電流代數(shù)和應為零。于是當各模塊的采樣電阻值相同時可得
IB1=![]() ;IB2=
;IB2=![]() ;……IBN=
;……IBN=![]()
由于 IB1+IB2+……+IBN=0
所以 UB=![]() (2)
(2)
式(2)說明,均流母線上的電壓UB,是各個并聯(lián)模塊負載電流的直流檢測信號,亦即是各模塊負載電流相對應的整流放大器的輸出電壓UI1,UI2,……,UIN的平均值,它反映的是各模塊輸出電流的平均值。
UIk與UB之差代表均流誤差,通過均流控制器輸出一個調整控制電壓Uck,一般情況下,UB可能大于UIk也可能小于UIk。當UB=UIk時,UB-UIk=0,表明這時已實現(xiàn)了均流,則Uck=0。當UB≠UIk時,Uck≠0,表明電流分配不均勻。這時,基準電壓Urk按下式修正:Urk=Ug±Uck,相當于通過均流誤差放大器Ak改變Urk,以達到均流目的。
使用這一方法實現(xiàn)均流,可以使N個并聯(lián)模塊的電流不均衡度(即均流誤差)在5%以內。定義模塊k的不均衡度為
S=![]() ×100%
×100%
式中:IL為并聯(lián)輸出的負載電流;
Ik為模塊k承擔的電流;
Ikmax為模塊k的最大電流。
應用均流母線檢測模塊的輸出電流,還要在窄頻帶的均流環(huán)中用運算放大器產(chǎn)生均流誤差信號,以調節(jié)基準電壓,將使并聯(lián)系統(tǒng)的瞬態(tài)過程復雜化。為避免使UPS的瞬態(tài)特性變壞,甚至不穩(wěn)定,應正確設計均流環(huán)的增益。
自動均流法的優(yōu)點是電路簡單、容易實現(xiàn)、均流精度高,缺點是如果有一個模塊與均流母線短路,或接在母線上的任一個模塊不能工作,則母線電壓下降,將促使各模塊電壓下調,甚至到達其下限,結果造成故障;而當某一模塊的電流上升到其極限值時,該模塊的電流檢測信號UIk大幅度增大,也會使它的輸出電壓自動調節(jié)到下限。下面介紹解決上述兩個缺點的措施。
2.1.1 監(jiān)控均流母線對地短路故障的措施
均流母線工作正常時電壓UB為一定值,且等于各模塊電流Ik檢測信號電壓UIk的平均值;而均流母線短路時其電壓UB=0,利用這個特點,在均流電路中接一個均流母線電壓檢測電路,就可以及時發(fā)現(xiàn)母線短路故障。檢測電路如圖5所示,它由光耦、繼電器和聲光報警器組成。

圖5 均流母線對地短路報警信號
2.1.2 任一模塊不工作時的監(jiān)控措施
模塊失效時,其輸出電流也為零,相應的模塊電流Ik檢測信號電壓UIk=0,即圖6中a點電壓等于零。因此,在整流放大器的輸出端接一個電壓檢測電路,就可以實現(xiàn)對模塊失效的監(jiān)控。監(jiān)控電路如圖6所示,它由光耦、繼電器和聲光報警器組成。模塊正常工作時,UIk>0,光耦導通,繼電器K工作,K的常開接點閉合,均流采樣電阻R接入母線,K的常閉接點斷開,報警器不工作;當模塊失效時,UIk=0,光耦截止,K失電,K的常開接點斷開,模塊與母線隔離,保證了其他模塊不下調,K的常閉接點閉合,報警器工作,告知用戶該模塊失效。

圖6 模塊失效監(jiān)控電路
2.2 民主均流法
民主均流(democratic)法或稱自治(autonomous)法是另一種自動均流法,它是按最大電流(highest current)自動均流的,這種均流法也有人將其稱作自動民主均流法。其電路是在圖4所示的自動均流法電路中,將采樣電阻換成二極管而成的。二極管的正端接在a點上,負端接在b點上,由于N個二極管的負極都接在了均流母線上,處于相同的電位,則N個并聯(lián)模塊中只有輸出電流最大的那個模塊的負載電流檢測信號電壓UIk最高。因此,也只有輸出電流最大的那個模塊,才能使與它連接的二極管導通,導通后使均流母線上的電壓UB=UIk,其他的二極管因受反偏置而截止。與截止二極管對應的模塊,就以均流母線上的電壓為基準來調整各自的輸出電流,從而實現(xiàn)均流。
從以上分析可知,民主均流法實質上是在N個并聯(lián)的模塊中,輸出電流最大的模塊將自動成為主模塊,其余的模塊則成為從模塊,各個從模塊的電壓誤差依次被整定,以調節(jié)負載電流分配的不均衡。由于N個并聯(lián)的模塊中,事先沒有人為設定哪個模塊為主模塊,而是按輸出電流的大小隨機排序,輸出電流大的模塊自動成為主模塊,所以人們稱此種均流法為自動民主均流法,或民主自動主從設定均流法。民主均流法(即按最大電流自動均流)的原理框圖如圖7所示。圖中模塊k的電流檢測信號UIk經(jīng)過一個二極管接到均流母線上,均流母線上的電壓UB=max│UIk,k=1,2,……,N│反映N個并聯(lián)模塊中最大的一個模塊電流。均流控制器SCk的輸入是最大的模塊電流與各從模塊電流的差值。以N=2為例,假定模塊1的輸出電流大于模塊2的輸出電流,則UI1>UI2,UI1使二極管VD1導通,UB=UI1。由于UI2<UB=UI1,所以二極管VD2截止。SC1的輸出電壓Uc1=0,SC2的輸出電壓Uc2=+Uc2,+Uc2使模塊2的基準電壓增大,并使模塊2的輸出電流增加,達到均流目的,此時,UI1=UI2=UB,I1=I2=IL/2。

(a) 電路框圖

(b) 電壓跟隨器電路圖
圖7 民主均流法的原理電路框圖
在正常情況下,各模塊的輸出電流是相等的,如果由于某個原因使模塊k的輸出電流突然增大,則模塊k自動成為主模塊,其他的N-1個模塊自動成為從模塊。這時UB=UIk>UIm,各個從模塊UIm(m=1,2,……,k-1,k+1,……,N)與UB(即UImax)比較后,通過SCm調整基準電壓Urk,自動實現(xiàn)均流。
以上是假定二極管是理想器件,即它的正向壓降等于零。實際上二極管是有正向壓降的,這個正向壓降對從模塊的均流精度雖無影響,但對主模塊的均流精度影響較大。為了克服二極管正向壓降對主模塊均流精度的影響,可以用圖7(b)所示的電壓跟隨器(或稱單向緩沖器buffer)來代替二極管。
3 均流的實現(xiàn)
以民主均流為例,來說明UPS模塊的均流并聯(lián)運行。
3.1 模塊的電路結構
單個模塊的電路結構如圖8所示。主電路是由全橋逆變器和交流濾波器LF及CF組成,控制電路可以采用以基準電壓Urk為基準進行穩(wěn)壓控制的任何形式的PWM控制電路。
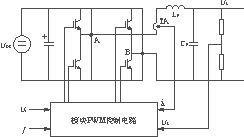
圖8 單個模塊的電路組成
由圖8可以得到單個模塊的數(shù)學模型如圖9所示。圖9中電壓UAB就是圖8中逆變器兩個橋臂中點A和B兩點之間的電壓,iH為環(huán)流。
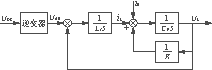
圖9 模塊的數(shù)學模型
由圖9可以得到如下兩個傳遞函數(shù)
![]() =
=![]() (3)
(3)
![]() =
=![]() (4)
(4)
由式(3)與式(4)可知,環(huán)流對輸出電壓的傳遞函數(shù),與輸入電壓對輸出電壓的傳遞函數(shù)的極點配置是相同的。因此,通過對輸入基準電壓Urk的調節(jié),就可以減小環(huán)流,從而達到均流的目的。
圖10為一個模塊的基準正弦波電壓發(fā)生器電路,它由精度整流器(A2)、積分器(A3)、可變增益放大器(A1)、功率放大器和波形反饋等組成。輸出電壓Urk的穩(wěn)壓精度可達±0.02%,波形失真度<0.5%。輸出電壓的大小可以通過給定電壓Ug來整定。因此,均流控制器SCk的輸出電壓Uck,可以通過改變給定電壓Ug的值,來改變基準電壓Urk的值,以達到均流的目的。

圖10 基準正弦波電壓發(fā)生器電路
3.2 均流控制的實現(xiàn)電路
在均流控制中,由于我們已假定采用圖7所示的民主均流法,則輸出電流最大的主模塊,通過均流母線將主模塊的最大電流傳送給各個從模塊。當各個從模塊得到主模塊的電流數(shù)據(jù)后與自身的輸出電流進行比較,將其差值通過均流控制器SCk產(chǎn)生一個直流電壓Uck去改變模塊的給定電壓Ug,使Urk=Ug+Uck,通過Urk的變化去控制各個從模塊的輸出電壓增大,從而也使輸出電流增大,直至各個模塊的輸出電流相等時為止,達到均流目的。
一種典型的均流電路實施方式如圖11所示。模塊-k的輸出電流通過電流互感器TAk的檢測,再經(jīng)過整流放大電路后輸出一個直流電壓UIk,UIk正比于模塊的輸出電流Ik。各模塊的直流電壓UIK通過采樣二極管VDk接到均流母線上。只有輸出電流最大的模塊-k所對應的直流電壓UIk才能使與其連接的二極管導通,導通后均流母線上的電壓UB=max│UIk,k=1,2,……,N│,其他的二極管因受反偏置而截止。輸出電流最大的模塊為主模塊,其余模塊為從模塊。由于從模塊的UIk<UB,故均流控制器SCk輸出+Uck,+Uck與給定電壓Ug相加,使基準電壓Urk=Ug+Uck,Urk使模塊的輸出電壓上升,也就是使輸出電流增大。由于負載所需的電流沒有變化,故從模塊輸出電流的增大必然會引起主模塊輸出電流的減小,最終使各模塊的輸出電流相等,達到均流目的。

圖11 一種典型的均流控制電路
如果圖11中的采樣二極管VDk用圖7(b)所示的緩沖電路來取代,就可以克服前面曾經(jīng)提到的,因二極管正向壓降而引起的主模塊均流精度降低的缺點。
同樣,若用采樣電阻R代替二極管,則圖11所示的均流控制電路就變成了自動均流法控制電路,也可以實現(xiàn)均流。
這里需要指明的一點是,可允許的UPS模塊的并聯(lián)個數(shù),取決于對UPS可靠性的要求,以及均流精度,對USP可靠性要求越高,均流精度越高,可允許的UPS模塊的并聯(lián)個數(shù)越多。另外也需要指出的是,UPS模塊的并聯(lián)個數(shù)并不是越多可靠性越高,當并聯(lián)個數(shù)達到一定程度以后,再多不但不能增大可靠性,反而使可靠性降低,這是由于并聯(lián)均流電路和通信電路、同步電路的故障率增多而造成的。
4 同步電路
UPS模塊并聯(lián)的同步方式有兩種:一種是各個模塊分別獨立地與市電同步;另一種是各個模塊共用一個同步電路與市電同步,但各模塊的基準正弦電壓分別獨立產(chǎn)生。前一種方法同步過程時間長,電路較復雜;后一種方法同步時間短,電路較簡單,有利于冗余并聯(lián)。采用后一種同步方法的同步原理電路如圖12所示。在并聯(lián)控制器中設置了一個共用同步電路使UPS中的本機振蕩器與市電同步。經(jīng)過同步的振蕩器信號分別送到各個UPS模塊中的基準正弦波電壓發(fā)生器中,使其產(chǎn)生出各模塊所需的基準正弦波電壓Urk,Urk的幅值受給定電壓Ug的控制。通過對各模塊給定電壓Ug的整定,可以使各模塊的基準正弦波電壓Urk的幅值相等。各個模塊的控制電路控制其輸出電壓uL跟蹤Urk,就達到了各模塊輸出電壓與市電電壓同步的目的。振蕩器與市電電壓的同步由鎖相環(huán)來完成,由于晶振頻率精度很高,穩(wěn)定性也很好,因此,可以認為各個模塊的輸出電壓頻率、相位和波形是完全相同的,電壓的幅值用給定電壓Ug進行整定,也可以達到相等。

圖12 N個并聯(lián)模塊與市電同步的原理框圖
5 結語
UPS模塊N+m冗余并聯(lián),當采用前面介紹的民主均流法時,可以采用美國Unitrode公司生產(chǎn)的UC3907集成均流控制芯片。此芯片結構簡單、功能強大、已在直流開關電源N+m并聯(lián)系統(tǒng)中得到了廣泛應用。交流冗余并聯(lián)的發(fā)展方向是采用數(shù)字控制,其優(yōu)點是智能化程度高、靈活、成本低廉、可靠性高、維護方便、一致性強。
正弦波UPS模塊的控制策略,除了前面介紹的方法以外,還有PLD控制、無差拍控制、模糊控制等,不管是哪種控制策略,通過改變模塊基準電壓的方法都可以實現(xiàn)均流控制。