
摘要:根據(jù)CMMB中LDPC碼校驗矩陣的結(jié)構(gòu)特點,提出了一種部分并行譯碼結(jié)構(gòu)的實現(xiàn)方法,并在XILINX的VirtexIV的XC4VLX80型FPGA上實現(xiàn)了這種結(jié)構(gòu)。該設(shè)計充分利用了LDPC校驗矩陣的規(guī)律,采用了一種適當(dāng)?shù)挠布Y(jié)構(gòu)和獨特的存儲器調(diào)用控制策略,故可在保證高性能和較大吞吐率的情況下,以較少的硬件資源實現(xiàn)兩種碼率的復(fù)用。
關(guān)鍵詞:CMMB;中國移動多媒體廣播;LDPC碼;部分并行結(jié)構(gòu);譯碼器
0 引言
低密度奇偶校驗(Low Density Parity Check,LDPC)碼是由Gallager博士在1962年首次提出來的,由于LDPC碼的誤碼性能能夠逼近香農(nóng)限,因而在無線通信、衛(wèi)星通信等領(lǐng)域都得到了較多應(yīng)用。中國移動多媒體廣播(CMMB)中使用的就是LDPC糾錯編碼。在CMMB標(biāo)準(zhǔn)中,LDPC碼長為9216,可支持1/2和3/4兩種碼率。作者通過深入分析CMMB中LDPC碼校驗矩陣的特點,采用了一種合適的硬件實現(xiàn)結(jié)構(gòu),因而在保證譯碼器較高性能和較快譯碼速度的情況下,以較低的硬件資源實現(xiàn)了兩種碼率的復(fù)用。
1 CMMB標(biāo)準(zhǔn)中的LDPC譯碼算法
1.1 CMMB中LDPC碼的主要特征
CMMB采用規(guī)則的LDPC碼,兩種碼率的LDPC校驗矩陣有類似的規(guī)律。CMMB中1/2碼率的LDPC碼校驗矩陣為一個4608x9216的矩陣,進(jìn)一步可劃分為256個18x9216行子矩陣。其中下一個行子矩陣是上一個行子矩陣的向右循環(huán)移36位,每一個行子矩陣的行重都為6;也可以把它劃分為256個4608x36列子矩陣,其中后一個列子矩陣是前一個列子矩陣的向下循環(huán)移18位,每一個列子矩陣的列重都為3。同理,3/4碼率的矩陣也可以進(jìn)行類似的劃分,可劃分為256個9x9216的行子矩陣,每個行子矩陣的行重為12;當(dāng)然,也可以分為256個2304x36,列重為3的列子矩陣。從校驗矩陣的特點可以看出,只要存儲器能存儲一個行或列子矩陣的非零元素,則利用這些非零元素,就可以恢復(fù)出整個校驗矩陣,從而進(jìn)行譯碼。而且更為重要的是,對于同種碼率,行子矩陣組和列子矩陣組之間在非零元素位置上有著潛在的對應(yīng)關(guān)系。本文正是通過挖掘這種潛在的對應(yīng)關(guān)系,設(shè)計出了一種獨特的存儲器調(diào)用控制策略,并成功實現(xiàn)了復(fù)用RAM的同時,滿足了兩種碼率的硬件結(jié)構(gòu)。
1.2 LDPC譯碼算法
常用的LDPC碼譯碼算法為置信度傳遞解碼算法(BP decoding)。該算法相對比較成熟,性能非常優(yōu)異。但是,BP算法中的f(x)函數(shù)包含對數(shù)運算和指數(shù)運算,這些復(fù)雜運算大大增加了BP譯碼器的運算量和復(fù)雜度。Fossorier等在1999年提出了一種min-sum譯碼算法,即利用一種近似的方法來處理BP算法中的f(x)函數(shù),以將對數(shù)和指數(shù)運算化簡為乘法和比較運算,從而減少了譯碼器的運算量,但該方法在性能上也有一定損失。后來,Jinghu Chen和Fossorier又提出了修正的min-sum算法。在碼長較長的情況下,修正的min-sum算法比BP算法性能只差0.03~0.05 dB,而在算法復(fù)雜度上則只需要乘以一個常量修正因子。基于以上分析,本文采用修正的min-sum算法來進(jìn)行迭代更新,此更新分為校驗節(jié)點更新和變量節(jié)點更新。其迭代譯碼步驟分為兩步。
第一步是初始化,即對每個m和n,![]()
其次是迭代過程。而每次迭代又包括以下3個步驟:

從而達(dá)到預(yù)定的迭代次數(shù)。否則重新更新Qm=n并開始下一輪迭代。上面式中的k表示第k次迭代。
記集合N(m)表示與校驗節(jié)點相連的所有變量節(jié)點;集合M(n)表示與變量節(jié)點相連的所有校驗節(jié)點;N(m)\n表示N(m)中除去變量節(jié)點n,同理,M(n)\m表示M(n)中除去校驗節(jié)點m。α一般取值為0.6~0.9,本系統(tǒng)中通過C模型浮點和定點仿真,可以得到α的最佳取值約為0.8,為了便于移位實現(xiàn),取值為0.7875或者0.8125均可。
2 CMMB中LDPC譯碼器的硬件實現(xiàn)
2.1 譯碼器總體結(jié)構(gòu)
LDPC碼的譯碼器通常有串行結(jié)構(gòu)、并行結(jié)構(gòu)和部分并行結(jié)構(gòu)等。根據(jù)校驗矩陣的特點,LDPC部分并行譯碼結(jié)構(gòu)可簡單分為輸入和輸出存儲單元、VNU(變量節(jié)點運算)單元、CNU(校驗節(jié)點運算)單元和中間結(jié)果存儲單元。其譯碼器結(jié)構(gòu)如圖1所示。為了便于ASIC實現(xiàn),本文采用單端口RAM,每塊RAM由一個控制器控制以實現(xiàn)不同碼率的地址初始化、讀RAM、寫RAM等操作。

2.2 輸入和輸出存儲單元
檢測到輸入數(shù)據(jù)有效后,可把輸入的串行數(shù)據(jù)依次存到初始化RAM里。本譯碼器一共有36個初始化存儲器,每個存儲器的深度為256。第1個數(shù)據(jù)存到第1個RAM的0地址,第2個數(shù)據(jù)存到第2個RAM的0地址,依次類推,第37個數(shù)據(jù)再存到第1個RAM的1地址,直到一幀9216個數(shù)據(jù)全部存滿36個RAM。同樣,輸出存儲單元可采用類似的存儲器調(diào)度方式。為了實現(xiàn)譯碼的連續(xù)性,本設(shè)計在輸入和輸出部分使用了乒乓結(jié)構(gòu),即采用兩組相同的36個RAM交替操作方式。
2.3 VNU單元
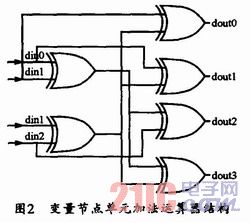
VNU單元用于完成兩部分工作:一是由校驗節(jié)點和初始化信息來更新變量節(jié)點的值;二是對每一列進(jìn)行硬判決。檢驗節(jié)點更新后的值將存儲到存儲單元R_Mem,而硬判決后的比特值則存到輸出存儲單元,直到滿足停止譯碼兩個條件之一時才可輸出碼字。第一次垂直更新時,不用輸入存儲單元Q_Mem的值,而只把輸入存儲單元里的初始值送到VNU單元進(jìn)行更新運算即可。由于兩種碼率下LDPC檢驗矩陣的列重都是3,因此,兩種碼率下的VNU個數(shù)都為36個,且每個VNU結(jié)構(gòu)也都是4輸入的VNU。每次運算時,都必須讀輸入存儲單元和Q_Mem(除第一次迭代外)中的數(shù)據(jù)的運算結(jié)果,但應(yīng)同時寫入R_Mem存儲單元中。本操作內(nèi)部采用流水線結(jié)構(gòu),每次迭代都延遲2個時鐘周期。由于讀地址都為0,而且讀地址每次加1,因此,執(zhí)行變量節(jié)點更新運算共需花費256+2個時鐘,垂直更新結(jié)構(gòu)的變量節(jié)點單元加法運算器結(jié)構(gòu)如圖2所示。
2.4 CNU單元
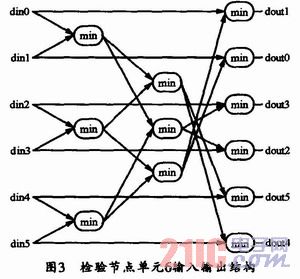
CNU單元也包括兩部分工作:一是由變量節(jié)點來更新校驗節(jié)點的值,并將更新后的值存儲到外部存儲器;二是對每一行硬判決后的比特進(jìn)行校驗,以確定其是否滿足校驗方程,也就是對每一行所對應(yīng)比特進(jìn)行異或,并看結(jié)果是否為零。若所有行的異或結(jié)構(gòu)都為零,則譯碼成功,退出迭代。在CMMB標(biāo)準(zhǔn)中,兩種碼率校驗矩陣H的行重有所不同(分別為6和12)。為了能共用CNU模塊并且共享存儲器資源,筆者設(shè)計了12輸入的CNU單元,并且使用9個CNU單元并行計算。這樣,當(dāng)碼率為1/2時,1個CNU單元更新2行,9個正好更新18行;而當(dāng)碼率為3/4時,9個CNU單元更新9行。每個12輸入的CNU單元由2個6輸入CNU單元組成,通過1個選擇器可控制CNU輸出。l/2碼率時,2個6輸入CNU的輸出結(jié)果可直接作為12輸入CNU的輸出結(jié)果,然后經(jīng)緩存后送入Q_Mem;3/4碼率時,2個6輸入CNU的輸出再經(jīng)過一級比較器得出的結(jié)果,才作為12輸入CNU的輸出值送到Q_Mem存儲。為了方便比較最后一級比較器,可在復(fù)用已有的兩組6輸入輸出比較單元的同時,還得輸出兩組最小值。CNU單元電路采用流水線結(jié)構(gòu)來設(shè)計延時增加4個時鐘周期(1/2碼率)和5個時鐘周期(3/4碼率)。6輸入輸出CNU單元的結(jié)構(gòu)簡圖如圖3所示。
2.5 中間結(jié)果存儲單元(R_Mem和Q_Mem)
由于兩種碼率時,校驗矩陣第1個子矩陣中非零元素的位置不一樣。故在水平更新時,RAM的初始化地址也不一樣,需要用兩組初始地址值。對兩種碼率來說,第1個行子矩陣非零元素的個數(shù)都為108(18x6或9x12)。事實上,第1個列子矩陣非零元素的個數(shù)同樣為108(3x36)。第1個行子矩陣和第1個列子矩陣非零元素位置有著潛在的一一對應(yīng)的關(guān)系。舉例來說,第1行(下標(biāo)從0開始)6個1的列位置(下標(biāo)從0開始)分別為0,7,19,26,31,5664。若分析第5664列可以發(fā)現(xiàn)5664=157x36+12,即5664列是第12列的移位。第12列中非零位置對應(yīng)的行號為0,119,1783=99x18+1。第5664列中非零位置對應(yīng)的行號為1,826,2945。于是非零位置(1783,12)的映射為(1,5664)。這樣,通過挖掘行子矩陣和列子矩陣中每一個非零位置的對應(yīng)關(guān)系,就能準(zhǔn)確地得出VNU和CNU運算單元數(shù)據(jù)之間的對應(yīng)關(guān)系。把這種對應(yīng)關(guān)系體現(xiàn)到memory的調(diào)度上來,就能準(zhǔn)確地從R_Mem和Q_Mem中取值以進(jìn)行水平和垂直更新。表1所列是中間結(jié)果存儲單元和寫地址的對應(yīng)關(guān)系。
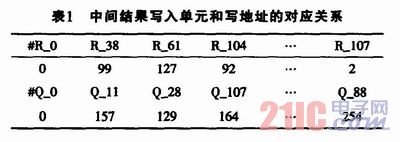
這里分別用了108個深度為256、寬度為6bits的單口RAM作為R_Mem和Q_Mem。當(dāng)進(jìn)行變量節(jié)點運算時,VNU輸入可從Q_Mem中讀取,讀數(shù)時,首地址為0,VNU輸出寫入R_Mem中,寫順序首地址為黑體數(shù)字,運算周期為256;當(dāng)所有變量節(jié)點更新后,接著是校驗節(jié)點的運算,同時
可進(jìn)行檢驗方程運算。此時,CNU輸入從R_Mem中讀取,讀數(shù)的首地址為0,CNU輸出寫入Q_Mem中,寫入順序首地址為黑體數(shù)字,運算周期同樣為256。如此交替,便可完成迭代過程。上述例子中,(1,5664)和(1783,1)的對應(yīng)關(guān)系反映在存儲單元上,正如表1中的第2列所示。
3 譯碼器的性能分析及FPGA實現(xiàn)
作者通過C語言模型和MATLAB模型對譯碼器進(jìn)行了浮點和定點仿真。為了達(dá)到性能和面積的平衡,位寬的取值為6 bits,而譯碼器性能只比浮點模型損失了約0.15 dB。在AWGN信道和BPSK的調(diào)制解調(diào)方式下,當(dāng)碼率為1/2,信噪比SNR為1.6 dB時,誤碼率已經(jīng)降至10-5以下。而在信噪比SNR為1.7 dB時,誤碼率已經(jīng)降至10-7以下;當(dāng)碼率為3/4時,在信噪比SNR為3.0 dB時,誤碼率可以降至10-6以下。
本文按照上面所描述的硬件結(jié)構(gòu),采用XILINX的VirtexIV-XC4VLX80器件實現(xiàn)了CMMB標(biāo)準(zhǔn)中兩種碼率的LDPC譯碼,并且達(dá)到了和C定點模型同樣的性能。在ISE開發(fā)工具上對其進(jìn)行編譯時,其具體的資源利用情況如表2所列。
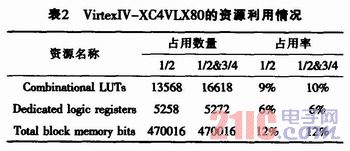
從表2中可以看出,此結(jié)構(gòu)不僅完全地復(fù)用了存儲器資源,而且最大限度地復(fù)用了邏輯運算單元。正是因為兩種碼率可復(fù)用RAM資源,使memory消耗較少,從而剩下大量的RAM資源可以用作CMMB其余部分(如解交織模塊)使用。LUT資源相對來說用得較多,這是由于并行結(jié)構(gòu)造成的,它有36個VNU和9個CNU交替進(jìn)行運算。
4 結(jié)束語
本文設(shè)計的部分并行結(jié)構(gòu)的LDPC譯碼器能夠兼容不同碼率和不同校驗矩陣行重的LDPC碼。運用該譯碼結(jié)構(gòu)在XILINX的VirtexIVC4VLX80器件上可實現(xiàn)CMMB標(biāo)準(zhǔn)中兩種碼率的LDPC譯碼。事實上,針對校驗矩陣的特點,采用一種獨特的存儲器控制策略,可以最大限度地復(fù)用硬件資源,從而大大減少了譯碼器的資源消耗。