
總體方案設(shè)計(jì)
智能遙控音樂(lè)嬰兒車(chē)由嬰兒車(chē)智能控制模塊、檢測(cè)系統(tǒng)、遙控模塊、顯示模塊、執(zhí)行系統(tǒng)、音樂(lè)模塊等幾部分構(gòu)成。
(1)嬰兒車(chē)智能控制系統(tǒng)采用嵌入式系統(tǒng)設(shè)計(jì),能夠自動(dòng)運(yùn)行,處理數(shù)據(jù),控制和協(xié)調(diào)各部分模塊工作。用戶(hù)可以在本系統(tǒng)開(kāi)發(fā)的基礎(chǔ)上對(duì)嬰兒車(chē)的各部分進(jìn)行觀察和控制。同時(shí)可通過(guò)按鍵板或紅外遙控器對(duì)系統(tǒng)進(jìn)行控制。
(2)檢測(cè)模塊又分為聲音檢測(cè)、尿濕檢測(cè)和溫度檢測(cè)。分別對(duì)嬰兒是否睡醒、嬰兒是否尿濕、奶水溫度分別給89C52對(duì)應(yīng)的信號(hào)。其中各個(gè)檢測(cè)模塊均受系統(tǒng)控制。
(3)遙控模塊采用NEC制式紅外遙控,可遙控MP3解碼的播放模式、音樂(lè)效果、選歌、音量、系統(tǒng)的時(shí)間調(diào)節(jié)各個(gè)模塊的控制和協(xié)調(diào)。
(4)顯示部分采用LCD12864液晶屏顯示,可顯示時(shí)間、倒計(jì)時(shí)時(shí)間、奶瓶溫度、濕度狀態(tài)。
(5)執(zhí)行機(jī)構(gòu)又分為機(jī)械執(zhí)行和聲音執(zhí)行,從而更完美地模擬出人的效果。
其整體結(jié)構(gòu)框圖如圖1所示。

2 硬件設(shè)計(jì)
2.1 硬件結(jié)構(gòu)
本文選用Atmcl公司STC89C52芯片為控制器的控制核心,以完成紅外、液晶屏、探測(cè)系統(tǒng)、按鍵板、執(zhí)行機(jī)構(gòu)的數(shù)據(jù)存儲(chǔ)、通訊以及協(xié)調(diào)。
2. 2 智能遙控模塊的硬件設(shè)計(jì)
控制器電路設(shè)計(jì)主要分為以下幾個(gè)模塊:
(1)STC89C52的外圍電路包括電源管理、鍵盤(pán)、液晶屏等。
(2)遙控模塊及其電路的設(shè)計(jì):本文選用普通的紅外發(fā)射接收管,采用NEC制式編碼譯碼。
(3)探測(cè)系統(tǒng)及其電路設(shè)計(jì):此系統(tǒng)主要對(duì)聲、溫、液三種物理量進(jìn)行探測(cè),聲音采用以駐極式話筒為信號(hào)源的三極管放大電路。溫度用18B20溫度探測(cè)芯片進(jìn)行測(cè)量。液體測(cè)量是以?xún)商结槥樾盘?hào)源的三極管放大電路。
(4)執(zhí)行機(jī)構(gòu):機(jī)械機(jī)構(gòu)主要由大功率直流電刷電機(jī)驅(qū)動(dòng)以L298N為核心的驅(qū)動(dòng)電路驅(qū)動(dòng)電機(jī),以555為核心的PWM發(fā)生電路來(lái)驅(qū)動(dòng)L298N從而實(shí)現(xiàn)調(diào)速。
2.3 單片機(jī)管腳設(shè)置
本文采用的單片機(jī)型號(hào)為STC89C52,其具有32個(gè)可操作的I/O口。在完成系統(tǒng)分配后還有I/O未被操作,故不需要擴(kuò)展I/O口。I/O分配如圖2所示。

2.4 遙控模塊電路的設(shè)計(jì)
遙控模塊采用市場(chǎng)上常見(jiàn)的車(chē)載MP3遙控器。可與MP3解碼模塊無(wú)縫連接。采用內(nèi)部程序調(diào)用其按鍵對(duì)時(shí)間等進(jìn)行無(wú)線操作。
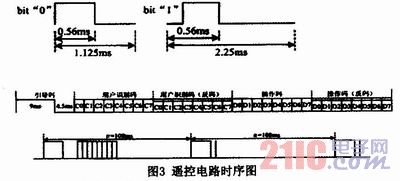
遙控解碼采用中央處理器,按照NEC制式。NEC標(biāo)準(zhǔn):遙控載波的頻率為38kHz(占空比為1:3);當(dāng)某個(gè)按鍵按下時(shí),系統(tǒng)首先發(fā)射一個(gè)完整的全碼,然后經(jīng)延時(shí)再發(fā)射一系列簡(jiǎn)碼,直到按鍵松開(kāi)即停止發(fā)射。簡(jiǎn)碼重復(fù)延時(shí)108ms,每?jī)蓚€(gè)引導(dǎo)脈沖上升沿之間的間隔都是108ms。一個(gè)完整的全碼如圖3所示。其中,引導(dǎo)碼高電平4.5ms,低電平4.5ms;系統(tǒng)碼8位,數(shù)據(jù)碼8位,共32位;數(shù)據(jù)0用“高電平0.5625ms+低電平0.5625ms”表示,數(shù)據(jù)1用“高電平0.5625ms+低電平1.6875ms”表示,一個(gè)簡(jiǎn)碼=引導(dǎo)碼+系統(tǒng)碼位0的反碼+結(jié)束位(0.5625ms,)高電平。其時(shí)序及工作原理如圖3所示。
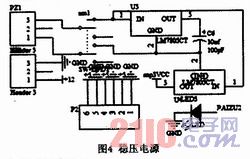
2.5 系統(tǒng)電源的設(shè)計(jì)
針對(duì)此電路功率大的特點(diǎn),本文采用獨(dú)立電源設(shè)計(jì),分別分為單片機(jī)工作電源、MP3解碼模塊電源、電機(jī)驅(qū)動(dòng)電源。其電路如圖4所示。
2.6 電機(jī)控制設(shè)計(jì)
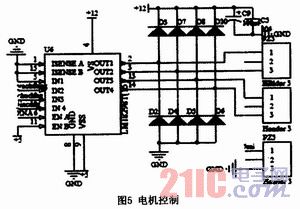
2.6.1 電機(jī)驅(qū)動(dòng)電路設(shè)計(jì)
嬰兒車(chē)共有兩個(gè)電機(jī),分別控制嬰兒的搖晃和奶瓶的開(kāi)啟與關(guān)閉,采用以L289N為核心的驅(qū)動(dòng)電路。其電路如圖5所示。
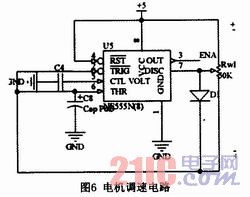
2.6.2 電機(jī)調(diào)速電路設(shè)計(jì)
考慮到電機(jī)為大功率的直流電機(jī),電機(jī)外形已經(jīng)固定。控制磁極對(duì)數(shù)實(shí)現(xiàn)調(diào)速不現(xiàn)實(shí)。串電阻由于其工作負(fù)載較大而電流變化大,綜上所述,本文采用PWM波的方式來(lái)實(shí)現(xiàn)電機(jī)的調(diào)速。PWM波的產(chǎn)生有軟件和硬件兩種實(shí)現(xiàn)方式。
方案一:通過(guò)軟件,所需硬件在原有的89C52的基礎(chǔ)上額外地添加A/D電轉(zhuǎn)換環(huán)節(jié),及A/D轉(zhuǎn)換。
方案二:通過(guò)硬件,所需硬件為常見(jiàn)的555定時(shí)器。
綜上對(duì)比,后者無(wú)論是在程序設(shè)計(jì)還是成本上都優(yōu)于前者,其設(shè)計(jì)電路如圖6所示。
2.7 嬰兒車(chē)的音樂(lè)模塊
本文采用MP3解碼模塊進(jìn)行音樂(lè)播放與控制。可讀取USB、SD、MMC卡中的MP3文件,支持FAT12、FAT16的文件系統(tǒng)。支持MP1layer3、MP2layer3、MP3layer3版本歌曲文件。其原理如圖7所示。

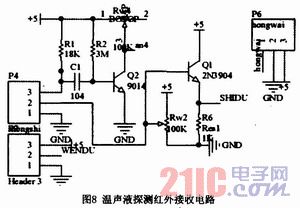
2.8 探測(cè)電路和紅外接收電路的設(shè)計(jì)
嬰兒車(chē)的探測(cè)系統(tǒng)在本產(chǎn)品中起著至關(guān)重要的地位,主要探測(cè)的物理量有奶瓶的溫度、嬰兒的哭聲和嬰兒身下的液體。奶瓶的溫度采用18B20進(jìn)行測(cè)量。針對(duì)嬰兒哭聲的分貝數(shù)高而持續(xù)時(shí)間長(zhǎng)的特點(diǎn),采用靈敏度較低的聲音觸發(fā)電路觸發(fā)高低電平給中央處理器,同時(shí)這種設(shè)計(jì)也可以檢測(cè)外部分貝高且持續(xù)時(shí)間長(zhǎng)的噪聲。紅外電路主要的是紅外接收管。其電路如圖8所示。
3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)的軟件主要分為六部分。分別是時(shí)間、檢測(cè)、紅外解碼、按鍵探測(cè)、外部輸出、LCD12864顯示。系統(tǒng)以紅外遙控為運(yùn)行最高優(yōu)先級(jí),時(shí)刻監(jiān)聽(tīng)紅外信號(hào)。用戶(hù)可隨意修改時(shí)間,包括觸發(fā)后持續(xù)的時(shí)間。通過(guò)本系統(tǒng)的研發(fā),在實(shí)踐應(yīng)用中達(dá)到了預(yù)期目標(biāo)。為嬰兒看護(hù)提供了極大方便。