
在大型集會場合,武警、公安在復雜電磁環(huán)境下要求快速準確傳遞信息,完成執(zhí)勤、處突和反恐等任務,而自然環(huán)境和人為干擾將直接影響信息傳輸。準確偵測定位干擾信號。可以及時了解干擾環(huán)境的組成、特點和電磁態(tài)勢,有助于做出正確的應對措施。目前,國內(nèi)外雖均有用于電磁檢測的設備,但價格昂貴,因此提出一種新算法的干擾信號偵測、追蹤與定位系統(tǒng),該系統(tǒng)設計的硬件設備、電路設計簡單。并具有小型靈活、簡單實用、性價比高等特性。
新算法與經(jīng)典算法比較
傳統(tǒng)目標源定位中,計算目標源經(jīng)度和緯度的經(jīng)典算法主要有2種:一是“兩點定位法”,即2條相對干擾源的定向射線(由測量時,定向天線給出的方向)交于一點,則這一交點,就是所要求的目標點,如圖l所示。

這種算法缺點是在求解干擾源C的經(jīng)、緯度過程需考慮的情況較多。例如求解過程中,以測量點A為例,A點的經(jīng)度可能比B點高,或比B點低;A點的緯度可能比 B點高,或比B點低,這共有4種情況,再加上干擾點C的每一種情況對應的2種不確定性,那么實際C點在求解過程中可能性共有4×4=16種。那么至少要編寫16個子程序,其編程過程異常復雜,且易于出錯。
二是“雙曲線定位法”,該定位法是以三個測量點中的任意兩個為雙曲線的焦點,并作兩對雙曲線,這兩對雙曲線必然有交點,該交點就是所求的干擾點。但這種方法也存在多種情況,分析比較復雜。因此基于該系統(tǒng)設計的要求,提出了一種新的定位算法。
該新算法主要優(yōu)點:建立數(shù)學模型,簡潔、明了和直觀地分析問題;極大改進“兩點定位法”,避免各種復雜、繁瑣情況的出現(xiàn),避免因南北半球或者經(jīng)、緯度的矢量性而產(chǎn)生的計算錯誤;簡化系統(tǒng)程序的復雜程度,提高程序的運行速率,縮短程序運行的周期,從而加快干擾源的追蹤和定位;精簡系統(tǒng)設備,降低設備成本,擴展原有系統(tǒng)功能。
系統(tǒng)算法
該系統(tǒng)設計的核心算法可分成兩部分,一是干擾點的跟蹤和定位,也就是求解干擾源經(jīng)、緯度;二是求解距離,即求解干擾源C與測量點A和B的距離。軟件設計時,以模塊化的設計思想,結合TMS320F2812的指令及其硬件的結構特點,系統(tǒng)軟件設計分為算法主程序和A/D轉換程序。
3.1 干擾偵測系統(tǒng)的基本原理
圖 2為干擾偵測與定位系統(tǒng)原理圖。為了直觀,把整個系統(tǒng)的主要原理圖抽象到二維平面坐標系中,其中:A點為偵測的主機位置;B點為偵測的從機位置;C點為待測干擾源;Jl為主機測試點A和干擾源C點之間的連線與正北方向的夾角;J2為從機測試點B和干擾源C點之間的連線與正北方向的夾角。以A點為坐標參考點,令A點坐標為(AJ,AW),則B點和C點的坐標分別是(BJ—AJ,BW—AW)、(CJ—AJ,CW—AWl:坐標X軸定義為經(jīng)度,Y軸定義為緯度。
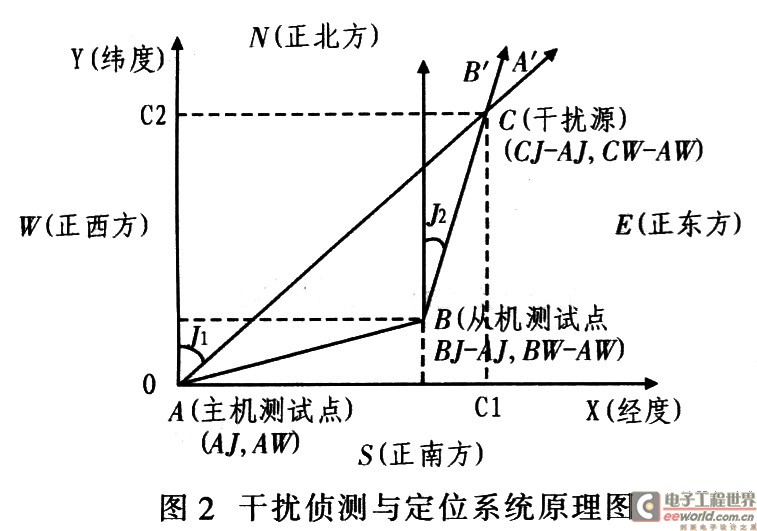
假定坐標系XOY中,在A點進行干擾測試,當頻譜儀的探測天線轉到與正北方向成J1角度時,干擾信號強度最大、干擾信號最強,因此可以確定干擾源就在射線 AA’上,其干擾信號與主機測量點(以正北方向為參考方向)的夾角就是Jl;同理,在從機探測點B點測量時,干擾源就在射線BB’上,其干擾信號與從機測量點(以正北方向為參考方向)的夾角就是J2;兩條射線AA’和BB’的交點就是干擾源C點,即完成干擾源的偵測和定位。假如測量過程中,干擾源不停移動,由于整個系統(tǒng)在定位時,干擾源的定位時間非常短暫,因此,經(jīng)過多次偵測和定位,可形成無數(shù)個C點組成的干擾源軌跡,從而發(fā)現(xiàn)干擾源的運動參數(shù),完成對干擾信號的追蹤。
3.2 計算干擾源經(jīng)度和緯度
在平面直角坐標系XOY中,令干擾源C點的坐標為(X,Y),則直線AC的斜率為:
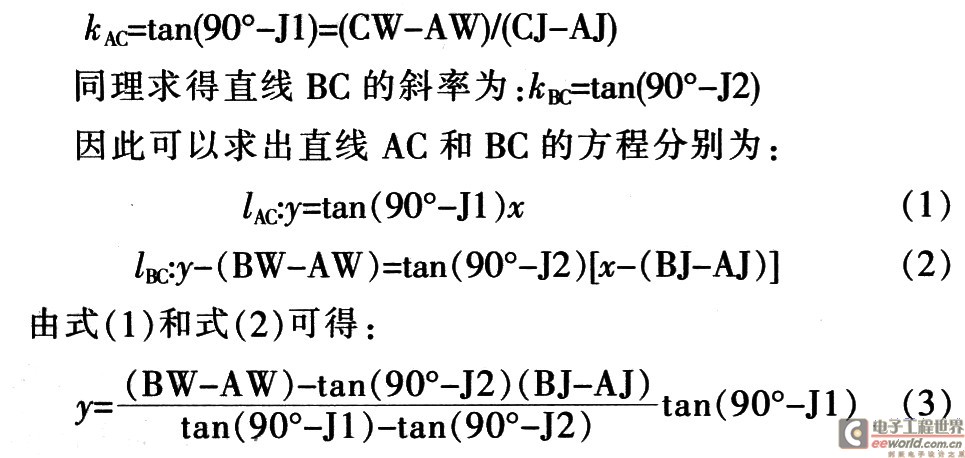
由上可知,坐標系XOY中,求解C點的坐標(X,Y)。令C點的經(jīng)度坐標為CJ,緯度坐標為CW,則最終C點的坐標為(AJ+X,AW+Y)。干擾源C點的坐標表達式中各項參數(shù),均可由已知條件和測量結果獲得,因此該算法完成干擾源的追蹤與定位。
3.3 干擾源C點與偵測點A和B的距離
已知兩點的經(jīng)度和緯度,利用式(3)求解出這兩點之間的距離。通過計算得出主機偵測點A和干擾源C的經(jīng)度和緯度坐標分別是(AJ,AW)和(AJ+x,AW+y),則A和C的實際距離DAC可表示為:

算法應用
WJ- 1型電磁干擾測量儀是基于該新算法而設計的,已應用于北京奧運會。該電磁干擾測量儀不僅能夠?qū)Ω蓴_信號進行全方位偵測、追蹤、定位、計算出其移動中干擾信號運動軌跡和尋找到干擾源最佳路徑,且還大大簡化原有抗干擾系統(tǒng)的設備的復雜度。而該設備中基于此算法由STCl2C5410AD單片機控制的自旋式超寬帶方向天線很好地解決抗干擾,簡化系統(tǒng)復雜度,節(jié)約成本。WJ-1型抗干擾偵測系統(tǒng)工作流程如圖3所示。
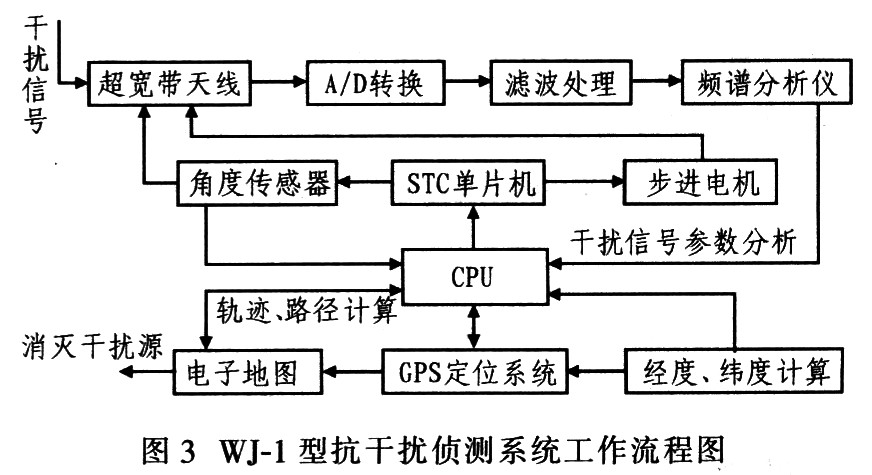
整個系統(tǒng)分為主機和從機兩大部分,主機和從機配合工作,掃描干擾信號的自旋式超寬帶方向天線,計算模擬信號處理A/D轉換在主從機的各自數(shù)值。在從機中干擾信號經(jīng)頻譜儀分析處理后,得到的各項參數(shù)傳輸給主機,有CPU統(tǒng)一處理。中角度傳感器主要用于記錄自旋式超寬帶方向天線的旋轉角度,STC單片機用于控制角度傳感器和步進電機,其中步進電機轉動其精度達0.05°/步,即平面方向精度可以達0.05°/步。CPU綜合主機、從機中對干擾信號分析的各項參數(shù)和地理坐標信息,經(jīng)計算得到干擾源的經(jīng)度、緯度,GPS導航后,顯示尋找干擾源的最佳路徑,同時也可在電子地圖上顯示干擾源周圍的地形地貌特征。
提供了一種極優(yōu)算法,通過把復雜的干擾信號追蹤與定位問題抽象到數(shù)學模型中,大大簡化信號求解過程中的計算量,同時也簡化程序軟件設計。