
如何將PWM邏輯信號(hào)源連接至電池供電的馬達(dá)驅(qū)動(dòng)器" title="馬達(dá)驅(qū)動(dòng)器">馬達(dá)驅(qū)動(dòng)器是我們面臨的一道難題。本文介紹了將馬達(dá)驅(qū)動(dòng)器連接至PWM源的設(shè)計(jì)方法,其中包括相關(guān)方程式與組件選擇指南。該方法所采用的電路包括具有精確度與敏感性分析的示例。
將馬達(dá)驅(qū)動(dòng)器連接至PWM源
LM4570是一種偏心旋轉(zhuǎn)質(zhì)量(ERM)與線性諧振激勵(lì)(LRA)馬達(dá)驅(qū)動(dòng)IC,適用于移動(dòng)電話及其它便攜式媒體設(shè)備。本文的設(shè)計(jì)詳細(xì)說明了將LM4570連接至PWM源的設(shè)過程。
雖然LRA馬達(dá)是由交流雙極型波形以接近LRA的諧振頻率驅(qū)動(dòng),但ERM馬達(dá)主要由直流電壓驅(qū)動(dòng)。由于需要采用直流電,因而可能不會(huì)出現(xiàn)交流耦合電容器與驅(qū)動(dòng)器IC的輸入端串聯(lián)。
設(shè)計(jì)與驅(qū)動(dòng)器IC連接的PWM接口需要大量數(shù)學(xué)知識(shí)以確保運(yùn)算正確。
設(shè)計(jì)該電路的第一步是確定所需的增益。PWM源可以提供下列電壓電平:
式1:
其中VIN(PEAK)是PWM源可以提供的單端峰值輸出電壓,VLOGIC是PWM邏輯高電壓。如果PWM源可達(dá)到0%和100%的占空比" title="占空比">占空比,請(qǐng)使用式1。如果PWM源達(dá)不到0%與100%的占空比,則請(qǐng)使用式1a,因?yàn)樾枰凑赵撌较鄳?yīng)地減小VIN(PEAK):
式1a:

其中DC(MAX)與DC(MIN)分別為PWM源的最大與最小占空比。請(qǐng)選用DC(MAX)或DC(MIN)使得能夠產(chǎn)生最小VIN(PEAK)項(xiàng),以確保獲得對(duì)稱的擺幅。
下一步是決定流經(jīng)ERM馬達(dá)所需的峰值輸出電壓VOUT(PEAK)。為了在所有電池電壓下都實(shí)現(xiàn)一致的操作,可以將此值設(shè)置為3V或更低,也或者將其設(shè)置為4.2V以便在電池電量充足的條件下獲得最大超速驅(qū)動(dòng)。必須依照ERM馬達(dá)規(guī)格來檢驗(yàn)峰值輸出電壓,以確保其幅度與持續(xù)時(shí)間不超過ERM馬達(dá)制造商規(guī)定的規(guī)格。我們可以利用VOUT(PEAK)與VIN(PEAK)計(jì)算出系統(tǒng)增益:
方程式2:
其中,“增益(Gain)”是從單端PWM源到橋接式負(fù)載(BTL)放大器輸出端所需的增益。
有關(guān)圖1中電路所需增益的分析表明BTL輸出端的2X增益需要校正,電阻可通過下列式子來計(jì)算:
式3:

最簡(jiǎn)易的方法是將RF選為200k,然后計(jì)算出RG1與RG2的和。將RG分為兩個(gè)電阻器是為了允許加入一個(gè)旁路電容器CF,以便形成一個(gè)一階低通濾波器" title="低通濾波器">低通濾波器。這個(gè)低通濾波器可防止來自PWM信號(hào)的高頻內(nèi)容免受放大器及ERM馬達(dá)的輻射。將RG1與RG2選為基本相同的值,即可利用它們的和,并通過式3計(jì)算出所需的增益。低通濾波器的截止頻率則可通過下列式子來計(jì)算:
式4:

其中f-3dB是低通濾波器的截止頻率,通常設(shè)置為2kHz至5kHz。
設(shè)計(jì)該電路的最后步驟是為REF2正確增加偏壓(請(qǐng)參閱圖1)。必需這樣做的原因是由于PWM源的平均直流電平(二分之一VLOGIC)不同于輸出端的平均直流電平(二分之一VBATTERY的變化值)。選擇圖1中的電阻R1與R2即可完成此操作。請(qǐng)注意,REF1引腳的戴維南(Thevenin)阻抗約為10k,因此我們將選定R2約等于200k,以使加載影響可以忽略。偏壓的計(jì)算式如下所示:
式5:
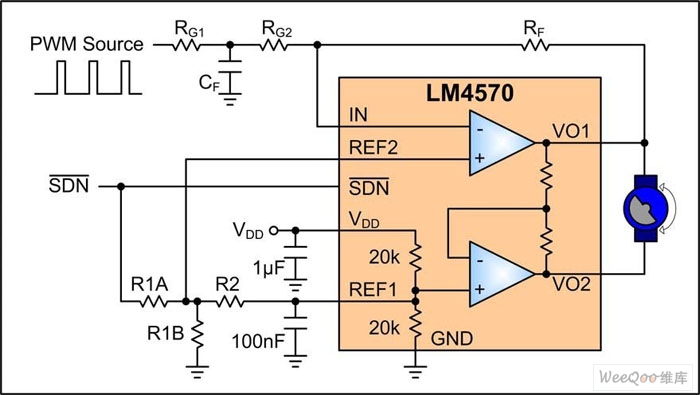
圖1:具有PWM接口的LM4570馬達(dá)驅(qū)動(dòng)器
其中R1是與并聯(lián)的R1A及R1B(形成這兩個(gè)電阻器的分壓)等效的阻抗。同樣,假設(shè)PWM輸入端的占空比為50%,且輸出端與VDD/2平衡,則可得出IN端的電壓計(jì)算式:
式6:
顯而易見,式5與式6在形式上實(shí)際是相同的,因此我們可以發(fā)現(xiàn),只需使R2等于RF,并使R1A與R1B為RG值的兩倍即可。使用對(duì)稱電路的一個(gè)好處是從計(jì)算式子中去除了VDD項(xiàng),從而使得此電路對(duì)電池電壓的變化不再敏感。
為了測(cè)試這些計(jì)算式,我們將使用具有下列參數(shù)的示例:VLOGIC=1.5V,VOUT(PEAK)=3.0V
為獲得上述值,我們需要“增益”達(dá)到4。將RF選為200k并使用式3即可計(jì)算出RG等于100k,或RG1與RG2等于49.9k。由于這兩個(gè)部分是對(duì)稱的,將R2選為200k并再次使用式3即可計(jì)算出R1等于100k,或R1A與R1B等于200k。為了*估該電路的性能,我們對(duì)0%至100%的輸入端占空比進(jìn)行參數(shù)掃描,同時(shí)將電池電壓從3.0V逐步增加至3.6V,直至4.2V。此外,我們使用蒙地卡羅(Monte Carlo)分析法檢測(cè)電阻值以判斷其敏感性(結(jié)果如圖2中所示)。
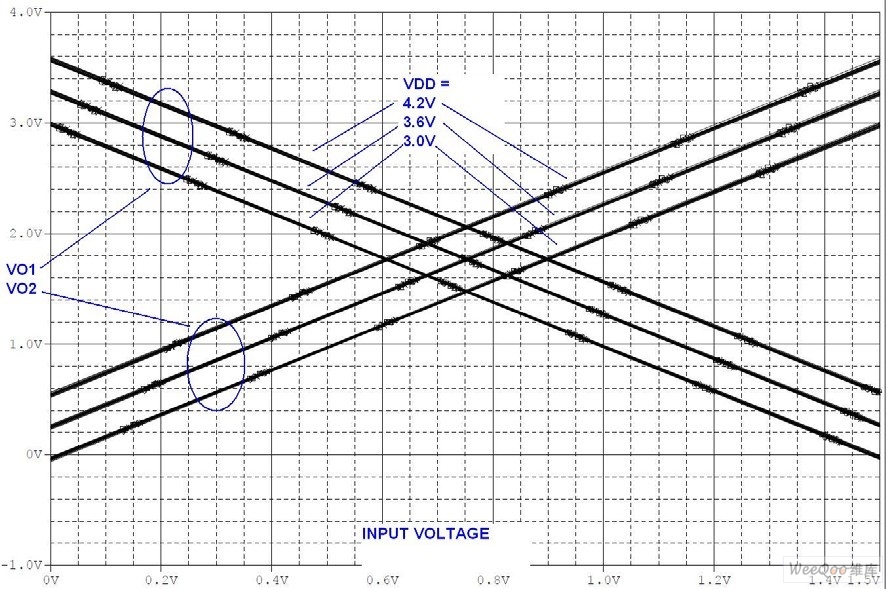
圖2:模擬結(jié)果
如圖2中所示,VO1與VO2兩個(gè)輸出端相互之間互補(bǔ)。請(qǐng)注意,這兩個(gè)信號(hào)在50%占空比點(diǎn)或輸入端上的0.75V處永遠(yuǎn)相交于零。即使當(dāng)電池電壓在其可用范圍內(nèi)變化時(shí),也會(huì)在二分之一電池電壓處相交。
圖2中的模擬也是電阻器公差為1%的蒙地卡羅掃描。如圖中所示,每條走線略微變寬,這表示僅對(duì)性能產(chǎn)生可以忽略的影響。
如圖2中所示,VO1與VO2兩個(gè)輸出端相互之間互補(bǔ)。請(qǐng)注意,這兩個(gè)信號(hào)在50%占空比點(diǎn)或輸入端上的0.75V處永遠(yuǎn)相交于零。即使當(dāng)電池電壓在其可用范圍內(nèi)變化時(shí),也會(huì)在二分之一電池電壓處相交。
圖2中的模擬也是電阻器公差為1%的蒙地卡羅掃描。如圖中所示,每條走線略微變寬,這表示僅對(duì)性能產(chǎn)生可以忽略的影響。